Фиг.1
Изобретение относится к приборостроению, в частности к механизмам для выполнения математических операций, и может найти применение в вычислительных устройствах и устройствах для преобразования движения.
Цель изобретения - расширение функциональных возможностей за счет использования бесконечного гибкого элемента в качестве передаточного звена.
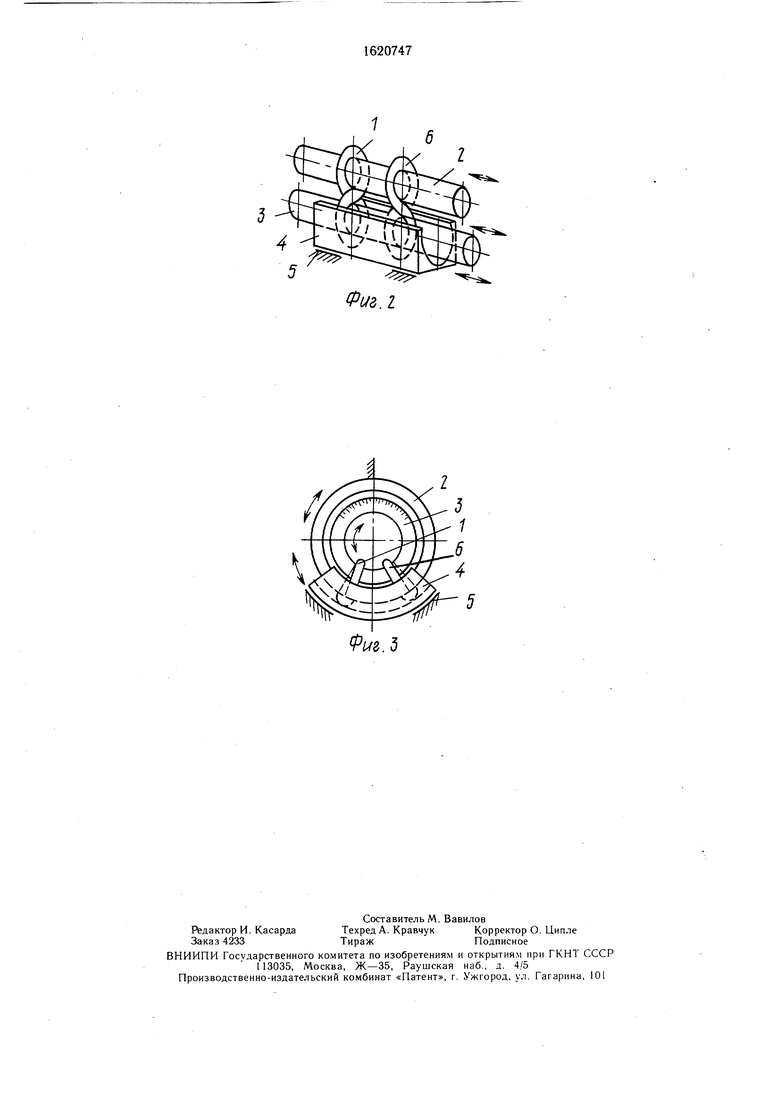
На фиг. 1 изображено дифференциальное суммирующее устройство, общий вид; на фиг. 2 - дифференциальное суммирующее устройство с несколькими гибкими элементами; на фиг. 3 - дифференциальное суммирующее устройство с замкнутыми подвижными элементами.
Дифференциальное суммирующее устройство состоит из бесконечного гибкого элемента 1 круглого сечения, перекрестно охватывающего подвижные элементы 2 и 3 в виде стержней и находящегося с ними во фрикционном сцеплении, и ползуна 4, перемещающегося в направляющей 5. В ползуне 4 выполнено углубление с цилиндрической поверхностью, охватывающей одну из ветвей гибкого элемента и находящейся с ней во фрикционном сцеплении.
Возможны установка дополнительных гибких элементов 6 и выполнение подвижных элементов 2 и 3 в виде колец (фиг. 3). Бесконечный гибкий элемент может быть выполнен из армированных композитных материалов, цилиндрической спиральной пружины, сплошного резинового или полимерного кольца.
Дифференциальное суммирующее устройство работает следующим образом.
При сообщении поступательного движения подвижному элементу 3 (фиг. 1) охватывающая его ветвь гибкого элемента 1 совершает качение одновременно по поверхности стержня и по поверхности углубления ползуна 4. Крутящий момент с нижней ветви гибкого элемента 1 передается в противофазе на верхнюю ветвь, охватывающую подвижный элемент 2, заставляя его перемещаться с той же скоростью, что и подвижный элемент 3, но в обратном направлении.
При сообщении поступательного движения ползуну 4 нижняя ветвь гибкого элемента 1 также совершает качение одновременно по поверхности полости ползуна 4 и по подвижному элементу 3. Крутящий момент с нижней на верхнюю ветвь элемента передается аналогичным образом. При одновременном поступательном движении подвижного элемента 3 и ползуна 4 подвижный элемент 2 совершает перемещение, пропорциональное сумме перемещений подвижного элемента 3 и ползуна 4. В случае применения только одного гибкого элемента 1 подвижный элемент 2 может изменять свое угловое положение
относительно подвижного элемента 3. При замене стержней кольцами (фиг. 3) показание величины, пропорциональной сумме перемещений подвижного элемента 3 и ползуна 4,,считывается непосредственно со шкалы на подвижном элементе 2.
0
Формула изобретения
1. Дифференциальное суммирующее устройство, включающее подвижные в осевом
направлении элементы, ползун и связанное с последним передаточное звено, отличающееся тем, что, с целью расширения функциональных возможностей, передаточное звено. выполнено в виде бесконечного гибкого элемента круглого сечения,
перекрестно охватывающего подвижные элементы с возможностью качения по ним, а в ползуне выполнено или цилиндрическое, или торообразное углубление для взаимодействия поверхностью с одной из ветвей гибкого элемента.
2.Устройство по п. 1, отличающееся тем, что оно снабжено по крайней мере одним дополнительным гибким элементом, перекрестно охватывающим подвижные элементы в направлении, противоположном основному гибкому элементу.
3.Устройство по пп. 1 и 2, отличающееся тем, что подвижные элементы выполнены в виде или жестких, или гибких пространстверно-изогнутых, и/или замкнутых стержней.
4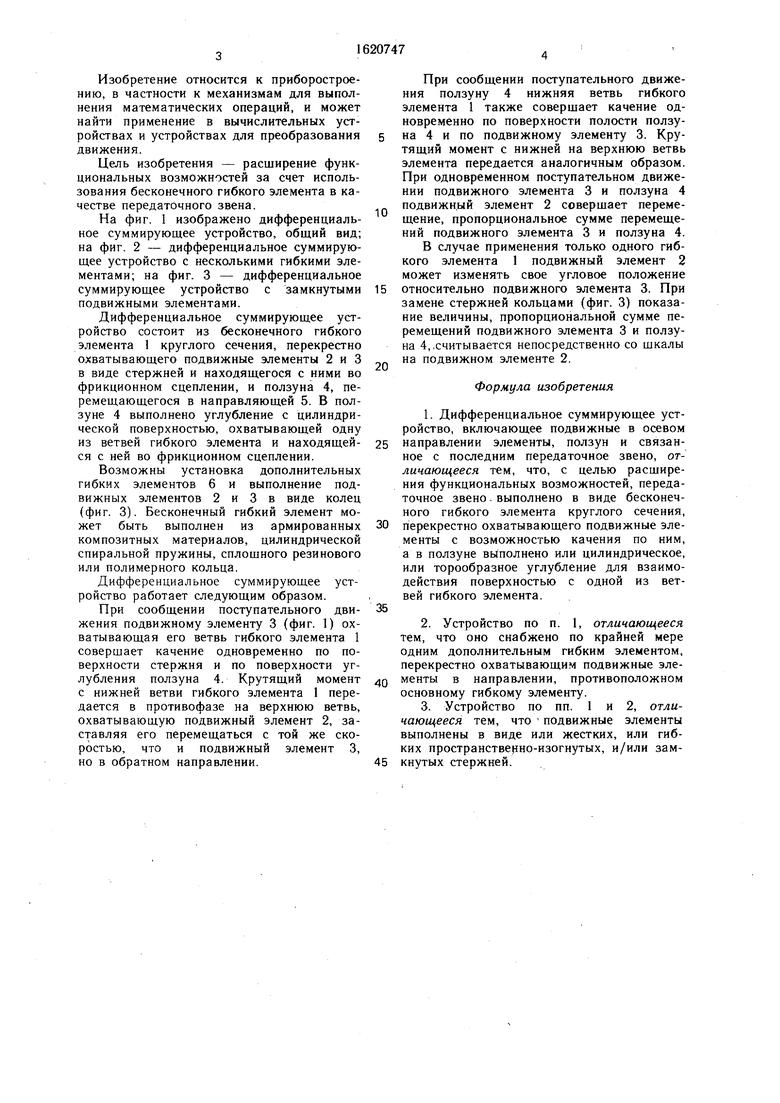
| название | год | авторы | номер документа |
|---|---|---|---|
| Передача | 1989 |
|
SU1626030A1 |
| Механизм поступательного перемещения | 1985 |
|
SU1359529A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ШУМАТОВА (ВАРИАНТЫ) | 2014 |
|
RU2577966C1 |
| Устройство для резки материала | 1990 |
|
SU1802793A3 |
| РЕВЕРСИВНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2014 |
|
RU2568004C2 |
| РЕВЕРСИВНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2019 |
|
RU2722225C1 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| МЕХАНИЗМ, ПРЕОБРАЗУЮЩИЙ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ В ВОЗВРАТНО-ПОВОРОТНОЕ, И ЗАПОРНОЕ УСТРОЙСТВО ДЛЯ ТРУБОПРОВОДОВ | 2009 |
|
RU2480657C2 |
| СТАНОК-КАЧАЛКА | 2006 |
|
RU2308616C2 |
| Устройство для изготовления ватных мотков | 1972 |
|
SU452934A3 |
Изобретение относится к приборостроению, в частности к механизмам для выполнения математических операций, и может найти применение в вычислительных устройствах и устройствах для преобразования движения. Цель изобретения - расширение функциональных возможностей за счет использования бесконечного гибкого элемента в качестве передаточного звена. При одновременном поступательном движении подвижного элемента 3 и ползуна 4 подвижный элемент 2 совершает перемещение, пропорциональное сумме перемещений подвижного элемента 3 и ползуна 4. 2 з.п. ф-лы, 3 ил.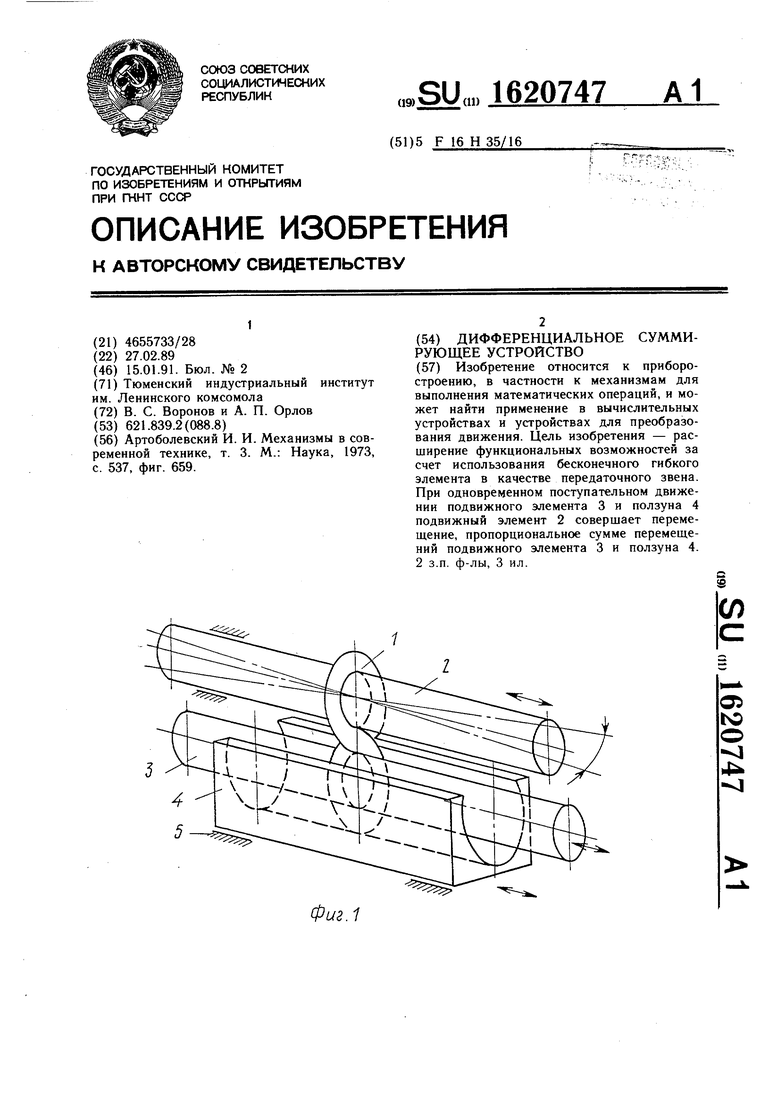
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике, т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| М.: Наука, 1973, с | |||
| Кухонный очаг | 1922 |
|
SU537A1 |
| Чертежная линейка с двумя компасами | 1923 |
|
SU659A1 |
