1
1359529.2
щий ролик 7, ролик 3, направляющий ролик 9 и наматывается на вал 6, а ветвь 5 гибкого элемента сматываетg ся с вала 6, огибает направляющий .ролик 10, ролик 4, направляющий ролик 8 и наматывается на вал 5. Поскольку скорость вращения валов 5 и 6 различна, одна из ветвей гибко10 го элемента а или б укорачивается, а другая - удлиняется. В результате происходит смещение ползуна 2, величина которого зависит от передаточного отношения зубчатой пары. Изме15 нение длины ветвей и бесконечного гибкого элемента 11 при вращении валов 5 и 6 происходит и в случае разного шага витков гибкого элемента на валах, и в случае различного диаИзобретение относится к машиностроению и приборостроению и может быть использовано в узлах различных машин и приборов в качестве послед него звена кинематической цепи привода подач для преобразования вращательного движения в поступательное.
Цель изобретения - повьшение на- грузочиой способности и точности перемещения путем обеспечения кинематической связи валов.
На чертеже представлен механизм, общий вид.
Механизм поступательного перемещения содержит основание 1, установ- ленньй на нем ползун 2 с двумя роликами 3 и 4 на концах, два вала 5 и б, две пары направляющих роликов 7, 8 и 9, 10, размещенные на основании 1 с обеих .сторон ползуна 2, и бесконечный гибкий элемент 11, охватывающий последова тельно валы 5 и 6, ролики 3 и 4 и направляющие ролики 7-10. Валы кинематически связаны один 25 мещения, содержащий основание, уста20 метра валов.
Формула изобретения 1. Механизм поступательного перес другим зубчатой парой с передаточным отношением, отличньм от единицы. Зубчатые колеса 12 и 13 установлены в расточках корпуса 14, жестко закрепленного на основании 1, а валы 5 и 6 - в зубчатых колесах на шпонка 15, обеспечивающих поступательное перемещение валов, каждый из которых охвачен несколькими витками бесконечного гибкого элемента 11.
Шаги навивки гибкого элемента 11 на валах различны. Кроме того, диаметры валов 5 и 6 могут быть различны.
Устройство работает следующим образом.
При совместном вращении валов 5 и 6 j обеспечиваемом зубчатыми колесами 12 и 13, витки бесконечного гибкого элемента 11, охватывающие валы 5 и 6, без скольжения перекатываются вдо валов, которые смещаются при этом относительно корпуса 14. Сбегающая ветвь а гибкого элемента сматывается с вала 5, огибает направляюРедактор И.Рыбченко
Составитель В.Карасев Техред Й.Маргентал
Заказ 6135/37
Тираж 804
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
25 мещения, соде
20 метра валов.
мещения, содержащий основание, устаФормула изобретения 1. Механизм поступательного переновленный на нем ползун, имеющий на концах два ролика, два вала и две пары направляющих роликов, размещенные на основании с обеих сторон ползуна, и бесконечный гибкий элемент, охватывающий последовательно валы, ролики и направляющие ролики, о т- личающийся тем, что, с целью повышения нагрузочной способности и точности перемещения, валы кинематически связаны друг с другом передачей, имеющей передаточное отношение, отличное от единицы, установлены в ее элементах с возможностью поступательного перемещения и охвачены каждый витками бесконечного гибкого элемента.
2.Механизм по п. 1, о т л ич а ю,,щ и и с я тем, что шаги навивки гибкого элемента на валах различны.
3.Механизм по п. 1, о т л и- чающийся тем, что диаметры
валов различны.
Корректор С.Черни
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки бесконечных резинотросовых лент | 1988 |
|
SU1803329A1 |
| Устройство для изготовления двухспиральных пружин | 1980 |
|
SU937090A1 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| Устройство для сборки бесконечных резинотросовых лент | 1988 |
|
SU1761539A2 |
| НЕСУЩАЯ МЕХАНИЧЕСКАЯ СИСТЕМА | 2006 |
|
RU2312761C1 |
| УСТРОЙСТВО ДЛЯ РАСКЛАДКИ ПРОВОДА ПРИ НАМОТКЕ | 1992 |
|
RU2024089C1 |
| Устройство для передачи штучных грузов к транспортно-складским конвейерам | 1990 |
|
SU1757974A1 |
| Способ изготовления объемных проволочных сеток и устройство для его осуществления | 1989 |
|
SU1643135A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВИНТОВЫХ СПИРАЛЕЙ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ КЕРНА, ПРИСПОСОБЛЕНИЕ ДЛЯ СНЯТИЯ ВИНТОВОЙ СПИРАЛИ С КЕРНА | 2010 |
|
RU2443490C1 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
Изобретение относится к машиностроению и приборостроению. Цель изобретения - повышение нагрузочной способности и точности перемещения путем обеспечения кинематической связи валов. Механизм поступательного перемещения содержит основание 1, ползун 2, два ролика 3, 4, два вала 5, 6 и две пары направляющих роликов 7 и 8, 9 и 10. Бесконечный гибкий элемент 11 охватывает несколькими витками валы 5, 6 и затем последовательно ролики и направляющие ролики. Валы кинематически связаны друг с другом зубчатой парой с передаточным отношением, отличным от единицы. Кроме того, могут быть различны шаги бесконечного гибкого элемента 11 на валы и диаметры валов. При совместном вращении валов 5,6 происходит укорачивание одной из ветвей бесконечного гибкого элемента 11 и удлинение другой, что вызьгоает смещение ползуна 2. 2 з.п. ф-лы, 1 ил. ,, (Л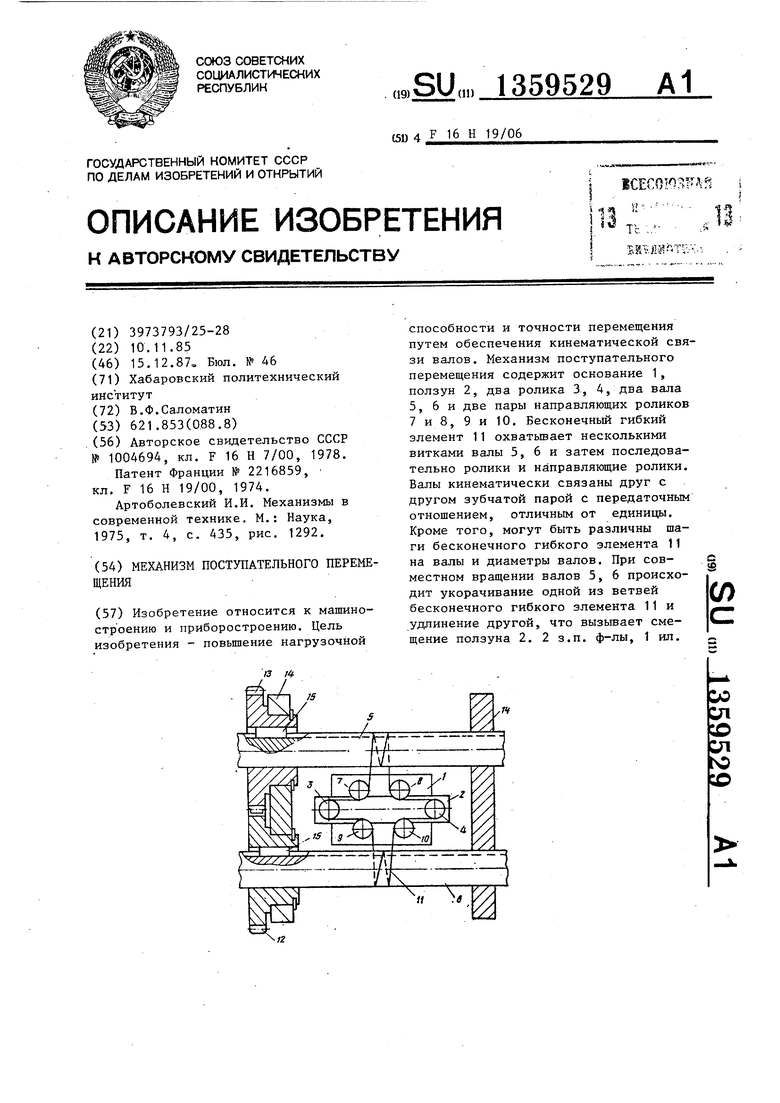
| Канатная передача | 1978 |
|
SU1004694A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ МОЩНОСТЬЮ ПЕРЕДАЧИ ПРОКОЛОТОГО СИГНАЛА ТРАФИКА | 1999 |
|
RU2216859C2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике, М.: Наука, 1975, т | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ получения твердых неплавких и нерастворимых продуктов уплотнения формальдегида с фонолами | 1925 |
|
SU435A1 |
| Комнатная печь | 1924 |
|
SU1292A1 |
