Фа. 1
Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точности измерений.
На фиг.1 приведена схема устройства для взвешивания массивных слитков в движении (Д I - высота поднятия весоизмерительного ролика над нижней полостью движения слитка); на фиг.2 - график динамики сигнала, приходящего с датчика нагрузки (Pi Рн-2 - значения сигнала
соответственно в т j , . , . . , г ( (.2 моменты
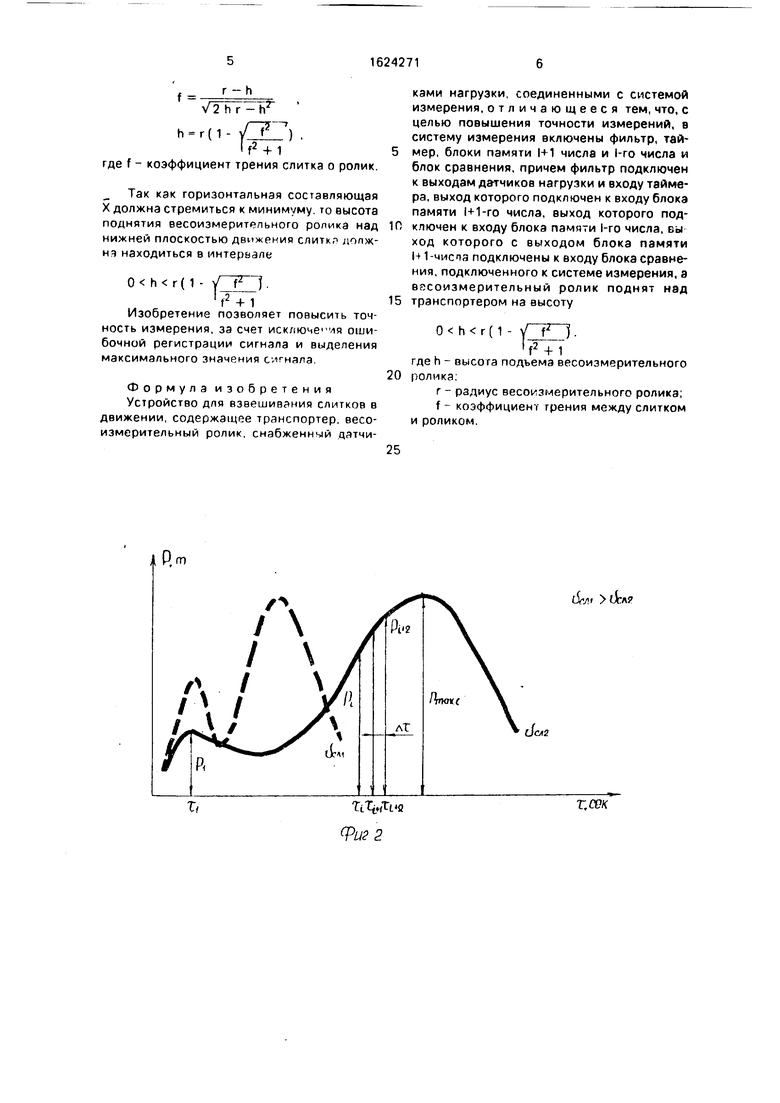
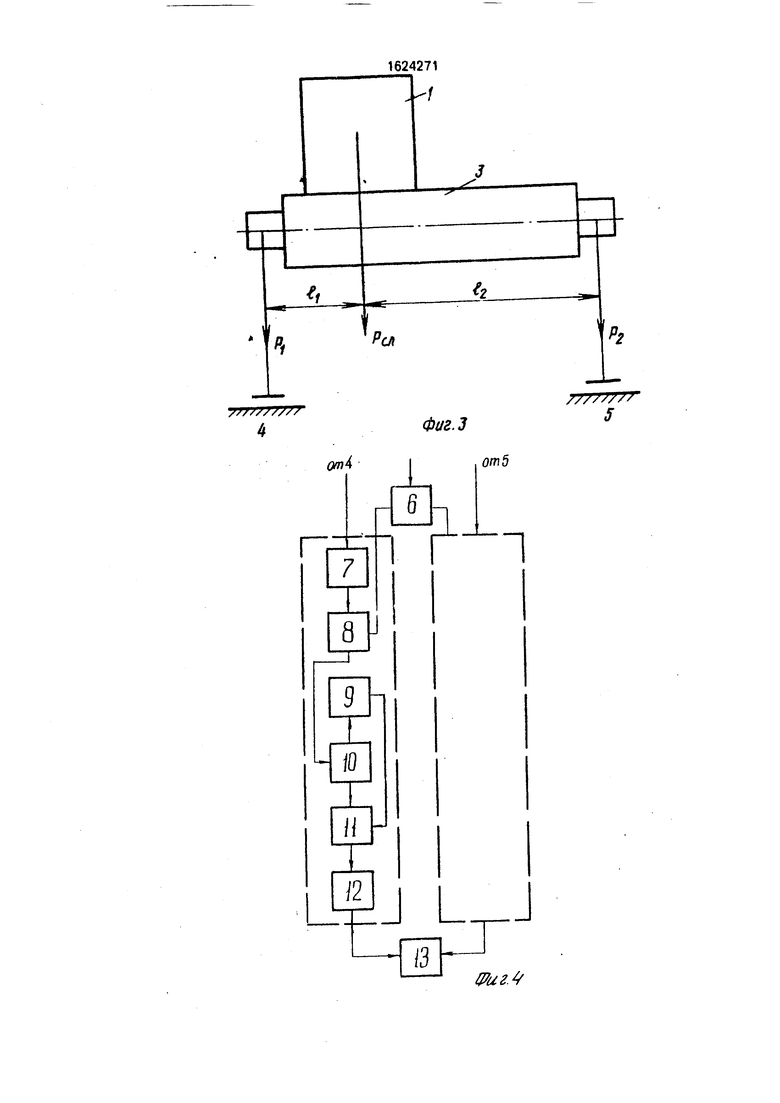
времени- от начала отсчета, Рмакс - максимальное значение сигнала с датчика нагрузки, получающееся в момент прохождения центра тяжести слитка над весоизмерительным роликом и соответствующее истинному значению веса слитка): на фиг.З - принципиальная схема измерения массы слитка в движении (Pi и PZ - силы, действующие на датчики 4 и 5 нагрузки соответственно; li и 12 - расстояния от оси слитка до опор весоизмерительного ролика, под которыми находятся датчики 4 и 5 нагрузки); на фиг.4 - блок-схема измерительной системы для первого датчика (для второго - схема аналогичная, где 6 - блок включения измерений, общий для двух датчиков нагрузки, выполненный, например, в виде усилителя с зоной нечувствительности, 7 - фильтр, например, пассивный, типа RC, 8 - таймер, 9 - блок памяти предыдущего значения сигнала с датчика 4 нагрузки, выраженного в числовой форме, 10 - блок памяти текущего зна чения сигнала с датчика 4 нагрузки, выраженного в числовой форме, 11 - схема сравнения, 12 - блок памяти для запомина ния максимального значения с датчика 4 нагрузки, 13 - сумматор, общий для двух датчиков нагрузки; на фиг.5 - момент наезда слитка 1 массой М со скоростью V на весоизмерительный ролик 3 с радиусом г, поднятый над нижней плоскост„,о движения слитка на высоту h; на фиг.6 - силы, которые действуют в момент наезда слитка на весоизмерительннй ролик.
Устройство состоит из слитка 1. рольганга транспортера 2, весоизмерительного ролика 3, размещенного на датчиках 4 и 5 нагрузки, устройства 6 включения измерений, датчики нагрузки соединены с фильтром 7, выход которого соединен с таймером 8, блока 9 памяти значения предыдущего сигнала I, выраженного в числовой форме, блока 10 памяти значения текущего сигнала 1+1. выраженного в числовой форме, схемы 11 сравнения сигналов, блока 12 памяти, запоминающего максимальное значение сигнала с датчика 4, сумматора 13, общего
двух датчиков нагрузки. Измерительная .хема для датчика 5 состоит из идентичных блоков.
Устройство для взвешивания массивных слитков в движении работает следующим образом.
Слиток, перемещаясь по рольгангу, наезжает на весоизмерительный ролик 3. При зтом на выходе блока 6 (фиг.4) появляется
0 сигнал включения системы измерения, который выполняет функции включения и отключения схемы. После этого сигнал с датчиков нагрузки поступает через фильтр 7 на вход своей подсистемы измерения. Таймер 8 с
5 мзксиматьчым шагом квантования (0,001 с), например, типа ТИ-40-576, производит опрос датчиков нагрузки От величины Дг зависит точность измерений - чем меньше Дг . гям точность измерений выше, причем
0 .А г может быть постоянной величиной или меняться по заранее заданному закону.
Текущее значение сигнала поступает в блок Ю памяти, выполненный в виде регистра памяти, состоящего из триггеров, име5 ющих два устойчивых состояния О или 1, а содерАимое этого блока предварительно заносится в блок 9 памяти (блоки 9 и 12 памяти ач погичны блоку 10). Далее значения Ьлокы Э и 10 перелаются в схему 11
0 сравнении и большее из этих значений поступает з блок 12 памяти Если вновь поступившее зна ение больше хранимого в блоке 12, то новое значение запоминается вместо прежнего, в противном случае содержимое
5 блока 12 памяти первого и второго датчиков нагрузки суммируется сумматором 13, на выходе которого получают сигнал, пропорциональный весу слитка.
Высоту поднятия h весоизмерительного
0 ролика над плоскостью транспортера 2 определяют из условия минимума горизонтальной состдвляющей реакции ролика FTp на воздействие слитка N (фиг.6) X N cos a+ F1p sm a ,
5 где а - угол между направлением касания слитка роликом и горизонталью; Fip - сила трения слитка о ролик. Из условия нахождения экстремума следует
0
5
dx da tg a
sin a
N (- sina + fcosa
r
r -h
i dx - П Ol
c a -
r -h
2hr-h2
f
r -h
-f
If2 + 1
h-r(1- V f ) ,
If2 + 1 где f - коэффициент трения слитка о ролик.
Так как горизонтальная составляющая X должна стремиться к минимуму, то высота поднятия весоизмерительного ролика над нижней плоскостью движения слиткл должна находиться в интервале
0 h r( 1 Изобретение позволяет повысить точность измерения, за счет исключения ошибочной регистрации сигнала и выделения максимального значения сигнала.
Формула изобретения Устройство для взвешивания слитков в движении, содержащее транспортер, весоизмерительный ролик, снабженный датчиками нагрузки, соединенными с системой измерения, отличающееся тем, что, с целью повышения точности измерений, в систему измерения включены фильтр, таймер, блоки памяти 1+1 числа и 1-го числа и блок сравнения, причем фильтр подключен к выходам датчиков нагрузки и входу таймера, выход которого подключен к входу блока памяти l+1-го числа, выход которого подключен к входу блока памяти 1-го числа, вы ход которого с выходом блока памяти Hl-чиспа подключены к входу блока сравнения, подключенного к системе измерения, а вйсоизмерительный ролик поднят над транспортером на высоту
0 (1 - .
где h - высота подьема весоизмерительного ролика:
г - радиус весоизмерительного ролика;
f - коэффициент трения между слитком и роликом.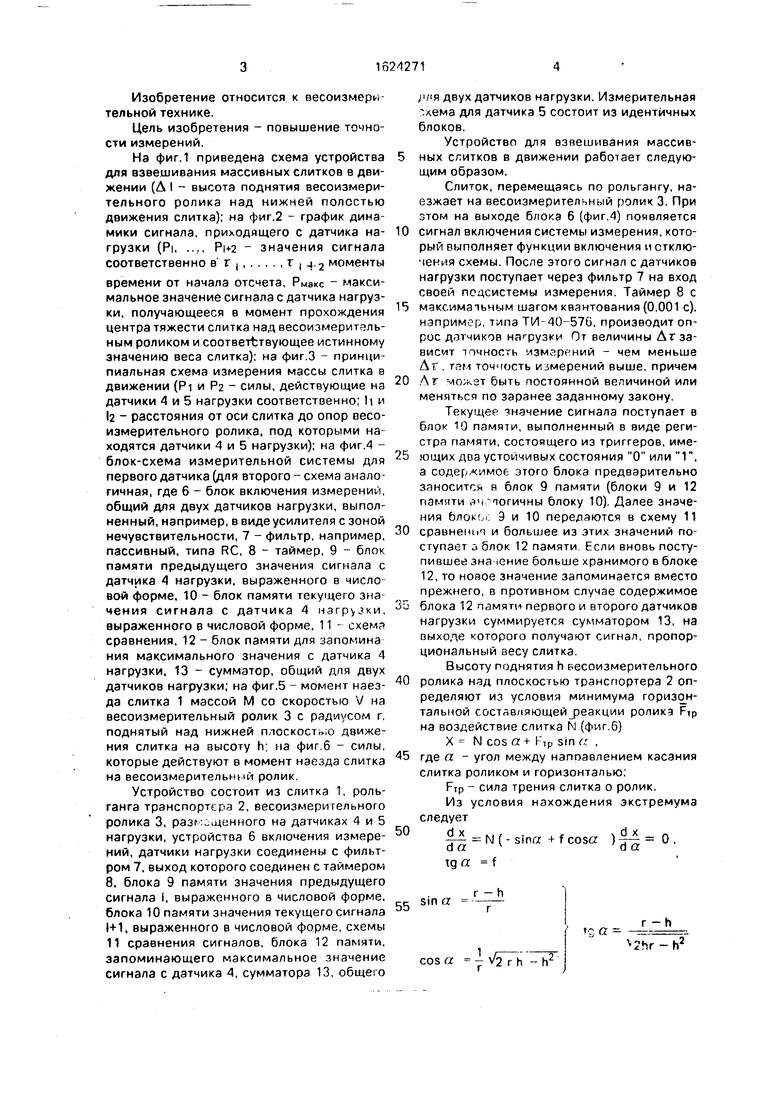
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ МАССИВНЫХ СЛИТКОВ В ТЕХНОЛОГИЧЕСКОЙ ЛИНИИ | 1994 |
|
RU2079116C1 |
| Весоизмерительное устройство | 1988 |
|
SU1631306A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЦЕНТРА ТЯЖЕСТИ ЛИТОЙ ЗАГОТОВКИ В ТЕХНОЛОГИЧЕСКОМ ПОТОКЕ | 1995 |
|
RU2115097C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ РУЛОНОВ ЛИСТОВОГО МЕТАЛЛА (ВАРИАНТЫ) | 2007 |
|
RU2364843C1 |
| Автомобильное весоизмерительное устройство | 1986 |
|
SU1357722A1 |
| Весы для взвешивания слитков | 1985 |
|
SU1290084A1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ПРОКАТА | 2004 |
|
RU2277231C2 |
| Весоизмерительное устройство с вычислением стоимости | 1980 |
|
SU887937A1 |
| Способ поосного взвешивания железнодорожных вагонов в движении и устройство для его осуществления | 1981 |
|
SU1023205A1 |
Изобретение может быть использовано при измерениях веса движущихся грузов Цель изобретения - повышение точности измерений Слиток 1, перемещаясь по рольгангу транспортера 2, наезжает на весоизмерительный ролик 3. размещенный на датчиках нагрузки Датчики нагрузки передают сигнал через фильтр и таймер в блоки памяти, которые последовательно передают дискретные значения сигнала в схему соавнения, в блоке памяти записывается максимальное значение сигнала с одного датчика нагрузки Другой датчик нагрузки снабжен аналогичным каналом обработки информации, сумматор обеспечивает сравнение сигналов от обоих датчиков Предложена формула для определения оптимальной высоты поднятия роликов 3 над рольгангом транспортера 2 6 ил fe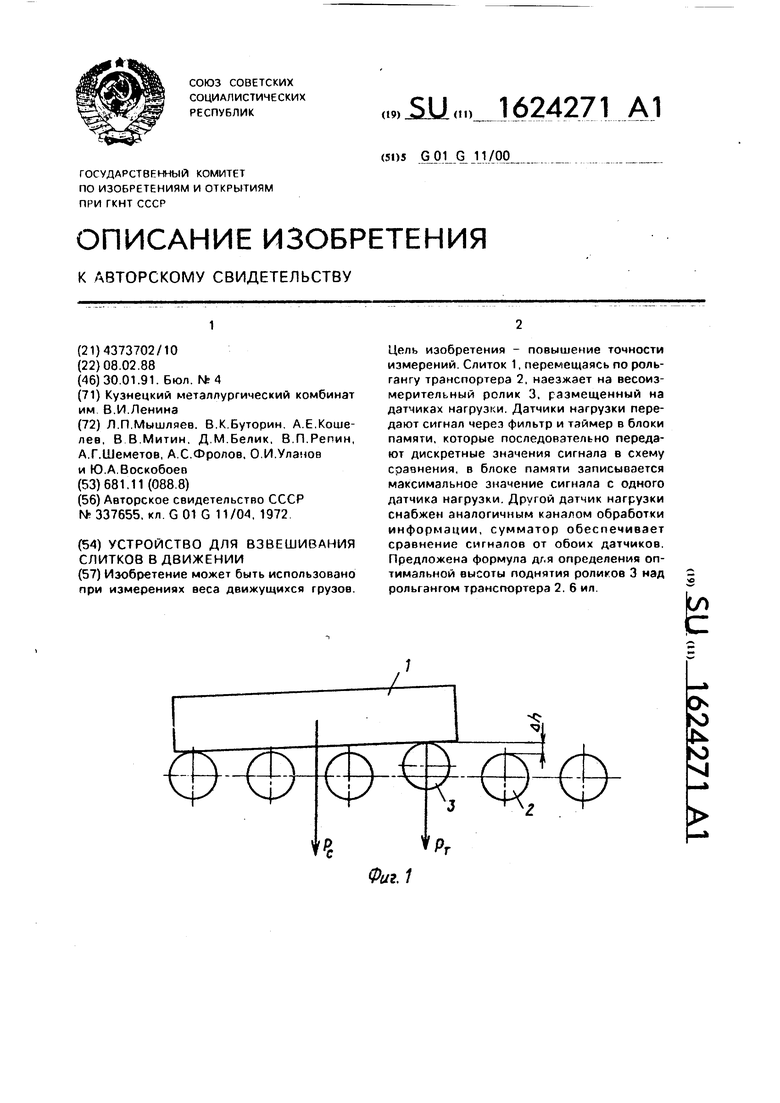
т,
dw
Т,С9К
1 Г
Т
GUIO
Ј ////////
Ј Мф
IигьгэГ
д
ушО
S//S//SS//
d
fcl.
Фаг. 6
| КОНВЕЙЕРНЫЕ ВЕСЫ | 0 |
|
SU337655A1 |
