(Л
С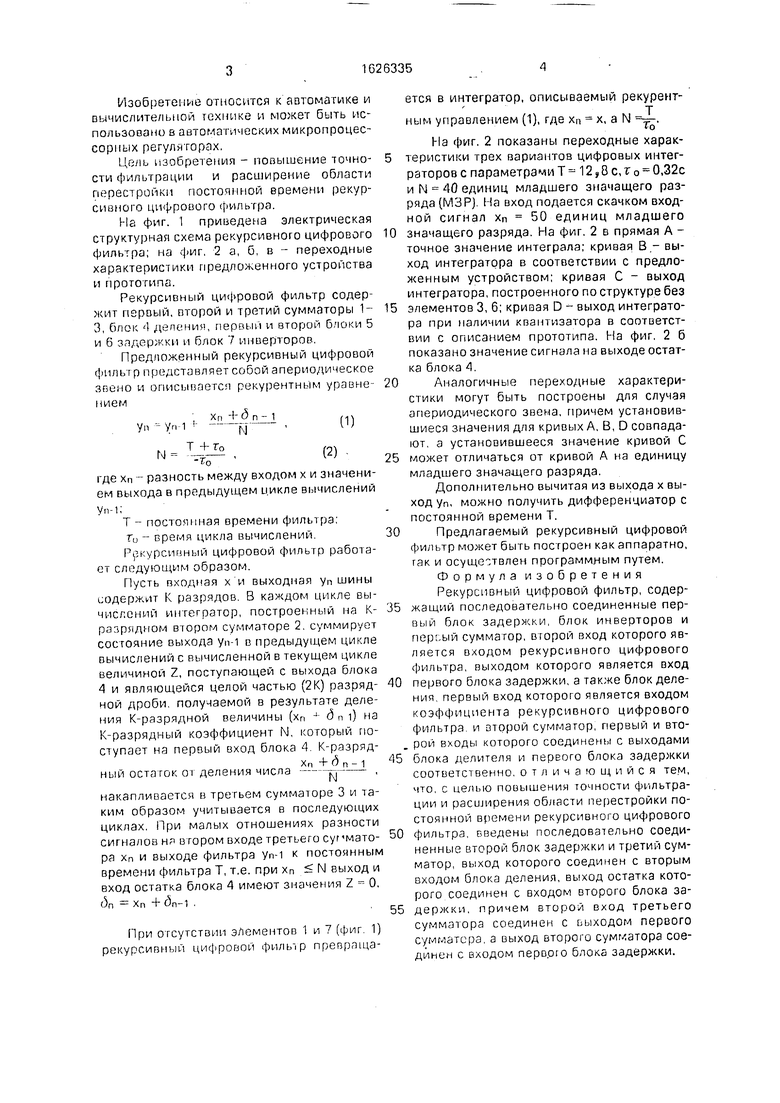
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕКУРСИВНЫЙ ЦИФРОВОЙ ФИЛЬТР | 2012 |
|
RU2490786C1 |
| Цифровой фильтр | 1975 |
|
SU586459A1 |
| Контроллер измерительного преобразователя | 1988 |
|
SU1541632A1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1991 |
|
RU2006936C1 |
| Устройство для определения коэффициентов разложения корреляционной функции по системе ортонормированных базисных функций | 1985 |
|
SU1287196A1 |
| Цифровой фильтр | 1983 |
|
SU1128265A1 |
| Цифровой фильтр | 1976 |
|
SU638969A1 |
| Цифровой фильтр | 1984 |
|
SU1205152A1 |
| Цифровой рекурсивный фильтр | 1990 |
|
SU1798891A1 |
| Цифровой фильтр | 1978 |
|
SU789995A1 |
Изобретение относится к автоматике и вычислительной технике, в частности может использоваться в электрических автоматических микропроцессорных (цифровых) регуляторах, цифровых интегрирующих, апериодических и дифференцирующих звеньев Цель изобретения - повышение точности фильтрации и расширение области перестройки постоянной времени фильтра. Фильтр содержит сумматоры 1 и 2, блок 4 деления,блок 5 задержки и блок 7 инверторов. Введены сумматор 3 и блок 6 задержки. В предложенном фильтре остаток отделения выходного сигнала сумматора 3 на коэффициент в блоке 4 накапливается в сумматоре 3, что позволяет получить высокую точность филы рации при ограниченной разрядности блоков фильтра 2 ил
xJL
-Уп-1
К Уп
О ГО
о
SCO CJ
|сл
I
Фиг.1
Изобретение относится к автоматике и вычислительной технике и может быть использовано в автоматических микропроцессорных регуляторах.
Цель изобретения - повышение точности фильтрации и расширение области перестройки постоянной времени рекурсивного цифрового фильтра.
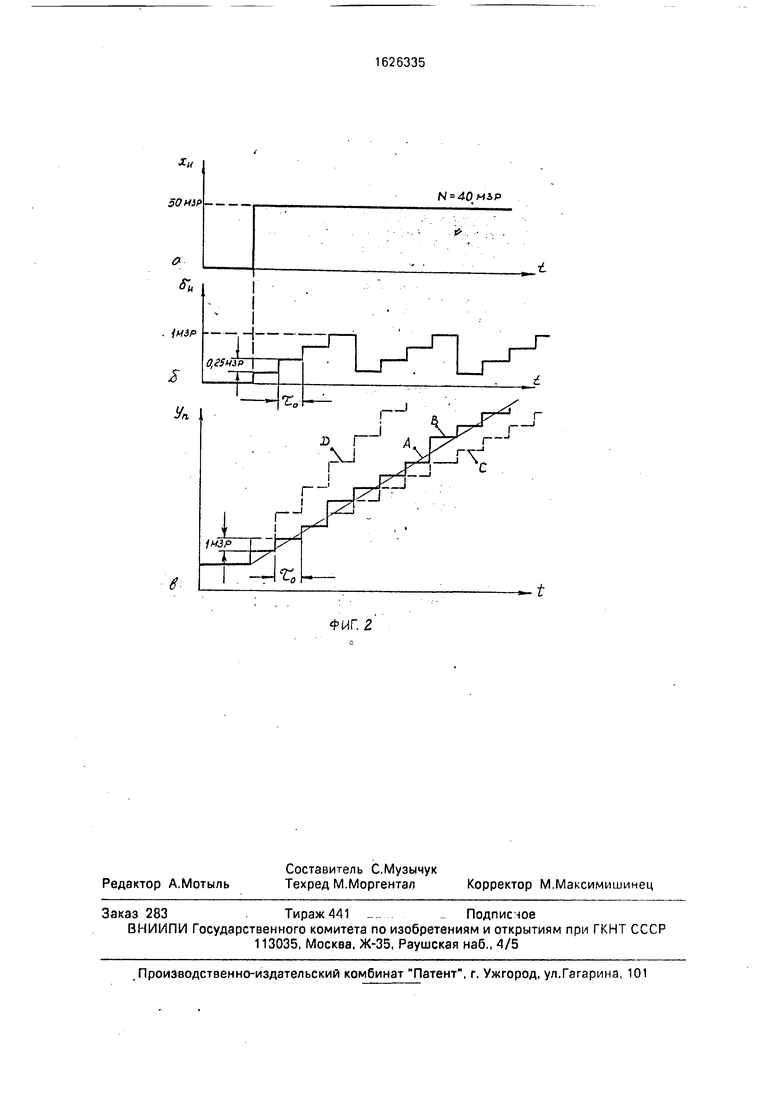
На фиг. 1 приведена электрическая структурная схема рекурсивного цифрового фильтра; на фиг. 2 а, б, в - переходные характеристики предложенного устройства и прототипа.
Рекурсивный цифровой фильтр содержит первый, второй и третий сумматоры 1- 3, блок 4 деления, первый и второй Блоки 5 и 6 задержки и блок 7 инверторов,
Предложенный рекурсивный цифровой фильтр представляет собой апериодическое звено и описывается рекурентным уравне нием
, хп -1- д n - 1 Уп --уп 1 ,
(1)
N Т-±
l О
(2)
где хп разность между входом х и значением выхода в предыдущем цикле вычислений
УЛ-К
Т - постоянная времени фильтра;
тъ - время цикла вычислений
Рекурсивный цифровой фильтр работает следующим образом.
Пусть входная х и выходная уп шины издержит К разрядов. В каждом цикле вычислений интегратор, построенный на К- разрядном втором сумматоре 2. суммирует состояние выхода уп-1 в предыдущем цикле вычислений с вычисленной в текущем цикле величиной Z, поступающей с выхода блока 4 и являющейся целой частью (2К) разряд- ной дроби, получаемой в результате деления К-разрядной величины (xn 4 5 n О на К-разрядный коэффициент N, который поступает на первый вход блока 4 К-разрядХп +Йп-1
ныи остаток oi деления числа r-j,
накапливается в третьем сумматоре 3 и таким образом учитывается в последующих циклах. При малых отношениях разности сигналов ня втором входе третьего суммато ра хп и выходе фильтра Уп-1 к постоянным времени фильтра Т, т.е. при xn N выход и вход остатка блока 4 имеют значения Z О,
(Зп ХП + Йп-1 .
-
При отсутствии элементов 1 и 7 (фиг 1) рекурсивный цифровой фильтр превраща
30
3540 45
ется в интегратор, описываемый рекурентным управлением (1), где хп х, а N
На фиг. 2 показаны переходные харак- 5 теристики трех вариантов цифровых интеграторов с параметрами Т 12,8 с, т 0 0,32с и N 40 единиц младшего значащего разряда (МЗР) На вход подается скачком входной сигнал ХР 50 единиц младшего 10 значащего разряда. На фиг. 2 в прямая А - точное значение интеграла; кривая В.- выход интегратора в соответствии с предложенным устройством; кривая С - выход интегратора, построенного по структуре без 15 элементов 3, 6; кривая D - выход интегратора при наличии квантизатора в соответствии с описанием прототипа. На фиг. 2 б показано значение сигнала на выходе остатка блока 4.
20 Аналогичные переходные характеристики могут быть построены для случая апериодического звена, причем установившиеся значения для кривых А, В, D совпадают, а установившееся значение кривой С 25 может отличаться от кривой А на единицу младшего значащего разряда.
Дополнительно вычитая из выхода х выход уп, можно получить дифференциатор с постоянной времени Т.
Предлагаемый рекурсивный цифровой фильтр может быть построен как аппаратно, гак и осуществлен программным путем.
Формула изобретения
Рекурсивный цифровой фильтр, содержащий последовательно соединенные первый блок задержки, блок инверторов и первый сумматор, второй вход которого является входом рекурсивного цифрового фильтра, выходом которого является вход первого блока задержки, а также блок деления первый вход которого является входом коэффициента рекурсивного цифрового фильтра и второй сумматор, первый и второй входы которого соединены с выходами блока делителя и первого блока задержки соответственно, отличающийся тем, что, с целью повышения точности фильтрации и расширения области перестройки постоянной времени рекурсивного цифрового фильтра, введены последовательно соединенные второй блок задержки и третий сумматор, выход которого соединен с вторым входом блока деления, выход остатка которого соединен с входом второго блока за- 55 держки, причем второй вход третьего сумматора соединен с выходом первого сумматора, а выход второго сумматора соединен с входом первою блока задержки.
50
ФИГ. 2
| УПРАВЛЯЕМЫЙ ДЕЛИТЕЛЬ ЧАСТОТЫ ИМПУЛЬСОВ | 2000 |
|
RU2175167C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
