Изобретение относится к области обработки цифровых данных с помощью электрических устройств, в частности, может использоваться в электрических автоматических микропроцессорных регуляторах, цифровых интегрирующих, апериодических и дифференцирующих звеньях, а также в любых цифровых алгоритмах и устройствах обработки последовательных цифровых отсчетов, в которых используется операция деления на постоянный целочисленный делитель.
Цель изобретения - повышение точности цифровой фильтрации.
В качестве ближайшего аналога принято изобретение SU 1626335 А1 от 20.09.1988, МПК Н03Н 17/04, опубликованное 07.02.1991 в Бюл. №5, в котором приводится реализация цифрового рекурсивного фильтра низких частот и цифрового интегратора. Особенностью описанных устройств является применение накапливающего сумматора, на первый вход которого подается цифровое значение входного сигнала, на второй вход подается задержанный на один такт остаток от деления, а сигнал с выхода подается на вход блока деления.
Недостатком изобретения SU 1626335 является то, что максимальная относительная погрешность в одном такте целочисленного деления по сравнению с идеальным результатом составляет (1):

где N>0 - величина целочисленного делителя (постоянный коэффициент).
Предлагаемое изобретение позволяет уменьшить максимальную относительную погрешность в одном такте целочисленного деления в два раза (2):

Технический результат достигается с помощью ввода дополнительного блока коррекции частного и остатка, вход которого соединен со вторым выходом блока деления на постоянный коэффициент, а первый выход соединен с входом второго блока задержки, в третьем сумматоре добавлен третий вход, который соединен со вторым выходом блока коррекции частного и остатка.
На фиг.1 приведена электрическая структурная схема рекурсивного цифрового фильтра. Рекурсивный цифровой фильтр содержит первый, второй и третий сумматоры 1-3, блок целочисленного деления на постоянный коэффициент 4, первый и второй блоки задержки 5, 6; блок инверторов 7; блок коррекции частного и остатка 8.
При отсутствии элементов 1 и 7 (фиг.1) рекурсивный цифровой фильтр представляет собой интегратор с коэффициентом 

где xn - цифровое значение входного сигнала.
Если значения xn и yn представлены в памяти вычислительного устройства целыми числами конечной разрядности, а вычисления по формуле (3) производятся по правилам целочисленной арифметики, результат операции 

где δn-1 - остаток деления xn-1, на N, при этом результат операции деления представляется целым числом, а дробная часть отбрасывается.
При вычислениях по формуле (4) на каждом шаге, вследствие операции отбрасывания дробной части, может возникнуть расхождение с идеальным (аналоговым) вычислением и представлением чисел с неограниченной разрядностью. Максимальная относительная погрешность операции деления на N определяется по формуле (1).
Если в (4) операцию деления с отбрасыванием дробной части частного заменить округлением до ближайшего целого, то максимальную относительную погрешность можно снизить в два раза согласно формуле (2). Операция округления реализуется вводом дополнительного блока коррекции частного и остатка. Направление коррекции частного на каждом шаге определяется в зависимости от величины остатка δn, и осуществляется по следующим правилам. Если значение целочисленного остатка δn превышает половину величины делителя N, то коррекцию частного производят в большую сторону, а частное увеличивают на одну единицу младшего значащего разряда (МЗР), а от остатка вычитают величину делителя. Если остаток δn отрицательный и по абсолютной величине превышает половину величины делителя N, то коррекцию частного производят в сторону меньшего отрицательного целого, при этом частное уменьшают на одну единицу МЗР, а к остатку прибавляют величину делителя. В остальных случаях остаток и частное не корректируют.
Алгоритм работы блока коррекции частного и остатка определяется формулами (5):

где δn - целочисленный остаток, полученный на шаге n; 
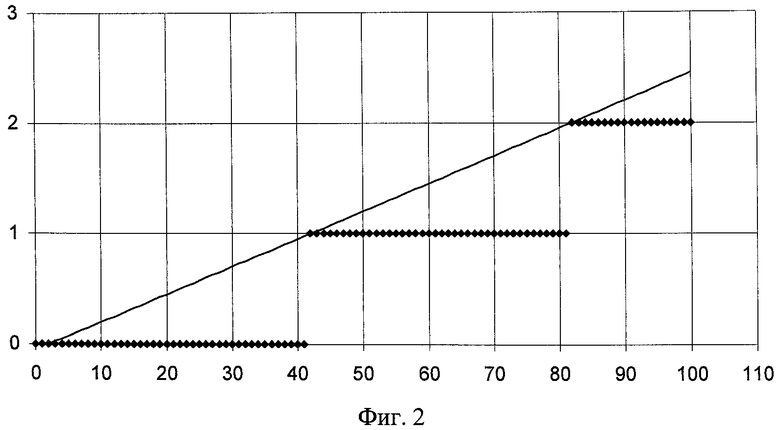
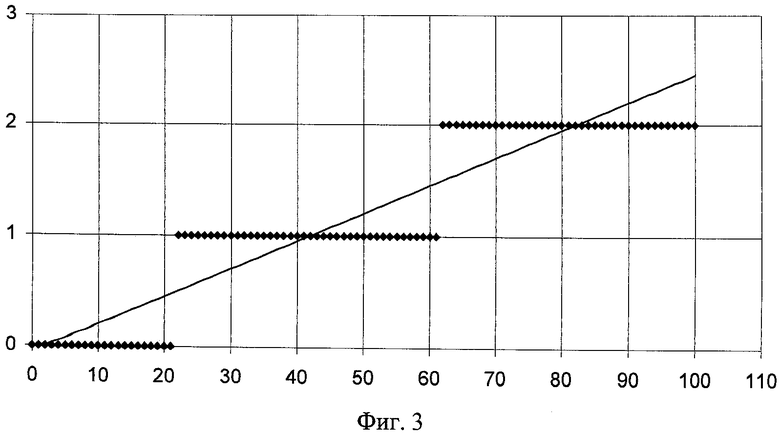
В качестве поясняющего примера на фиг.2, 3 приведены диаграммы, показывающие результат работы интеграторов, реализованных по схеме ближайшего аналога SU 1626335 (фиг.2) и предлагаемого изобретения (фиг.3). По оси абсцисс отображены номера тактов вычислений, по оси ординат - значения выходов интеграторов. Непрерывной линией показан сигнал на выходе идеального интегратора, точками - его цифровых реализации. В расчетах использовались следующие параметры: коэффициент каждого интегратора 
Предлагаемое изобретение может быть реализовано как аппаратно, так и программно. Все элементы устройства выполняют операции над целыми числами ограниченной разрядности в какой-либо позиционной системе счисления с положительным целым основанием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рекурсивный цифровой фильтр | 1988 |
|
SU1626335A1 |
| УСТРОЙСТВО ДЛЯ МАСШТАБИРОВАНИЯ ЧИСЛА В МОДУЛЯРНОЙ СИСТЕМЕ СЧИСЛЕНИЯ | 2002 |
|
RU2246753C2 |
| УСТРОЙСТВО ДЛЯ ДЕЛЕНИЯ ЧИСЛА В МОДУЛЯРНОМ КОДЕ НА ОСНОВАНИЕ СИСТЕМЫ СЧИСЛЕНИЯ | 2002 |
|
RU2237274C2 |
| Устройство для деления чисел | 1980 |
|
SU907544A1 |
| Устройство для деления чисел | 1988 |
|
SU1580353A1 |
| УСТРОЙСТВО ДЛЯ ДЕЛЕНИЯ ЧИСЛА В МОДУЛЯРНОМ КОДЕ НА ОСНОВАНИЕ СИСТЕМЫ СЧИСЛЕНИЯ | 2002 |
|
RU2231822C2 |
| Устройство для деления | 1986 |
|
SU1357947A1 |
| Устройство для деления | 1978 |
|
SU802962A1 |
| УСТРОЙСТВО ДЛЯ ДЕЛЕНИЯ | 1991 |
|
RU2018933C1 |
| Устройство для деления | 1990 |
|
SU1728862A1 |
Изобретение относится к области обработки цифровых данных, в которых используется операция деления на постоянный целочисленный делитель. Техническим результатом изобретения является повышение точности цифровой фильтрации, а также уменьшение максимальной относительной погрешности в каждом такте целочисленного деления, возникающего в результате округления до целого частного. Фильтр содержит блок коррекции частного и остатка. При этом направление коррекции частного на каждом шаге определяется в зависимости от величины остатка и осуществляется по следующим правилам. Если значение целочисленного остатка превышает половину величины делителя, то коррекцию частного производят в большую сторону, а частное увеличивают на одну единицу младшего значащего разряда (МЗР), а от остатка вычитают величину делителя. Если остаток отрицательный и по абсолютной величине превышает половину величины делителя, то коррекцию частного производят в сторону меньшего отрицательного целого, при этом частное уменьшают на одну единицу МЗР, а к остатку прибавляют величину делителя. В остальных случаях остаток и частное не корректируют. 3 ил.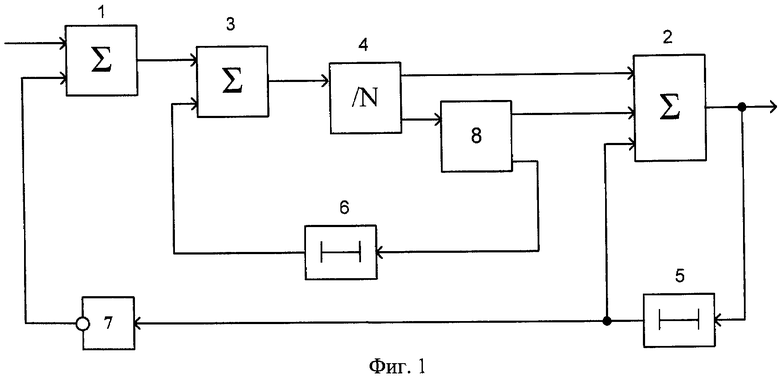
Рекурсивный цифровой фильтр, содержащий последовательно соединенные первый блок задержки, блок инверторов и первый сумматор, второй вход которого является входом рекурсивного цифрового фильтра, выходом рекурсивного цифрового фильтра является вход первого блока задержки, а также последовательно соединенные второй блок задержки, второй сумматор, блок деления на постоянный коэффициент и третий сумматор, второй вход второго сумматора соединен с выходом первого сумматора, второй вход третьего сумматора соединен с выходом первого блока задержки, отличающийся тем, что, с целью повышения точности фильтрации, введен блок коррекции частного и остатка, вход которого соединен со вторым выходом блока деления на постоянный коэффициент, а первый выход соединен с входом второго блока задержки, в третьем сумматоре добавлен третий вход, который соединен со вторым выходом блока коррекции частного и остатка.
| Цифровой рекурсивный фильтр | 1990 |
|
SU1798891A1 |
| Рекурсивный цифровой фильтр | 1982 |
|
SU1075374A1 |
| Рекурсивный цифровой фильтр | 1988 |
|
SU1626335A1 |
| СЪЕМНАЯ РОТОРНАЯ ГИДРОМАШИНА | 0 |
|
SU253583A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

