Изобретение относится к машиностроению и может быть использовано для автоматизации операций загрузки металлорежущего оборудования.
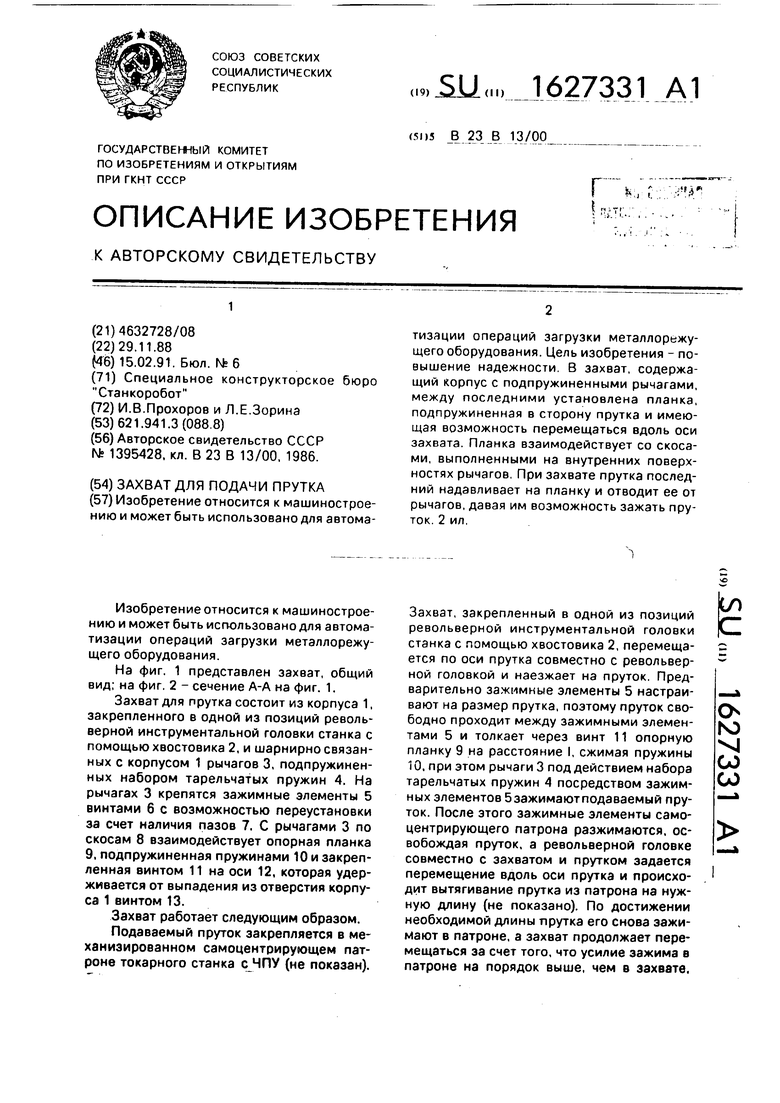
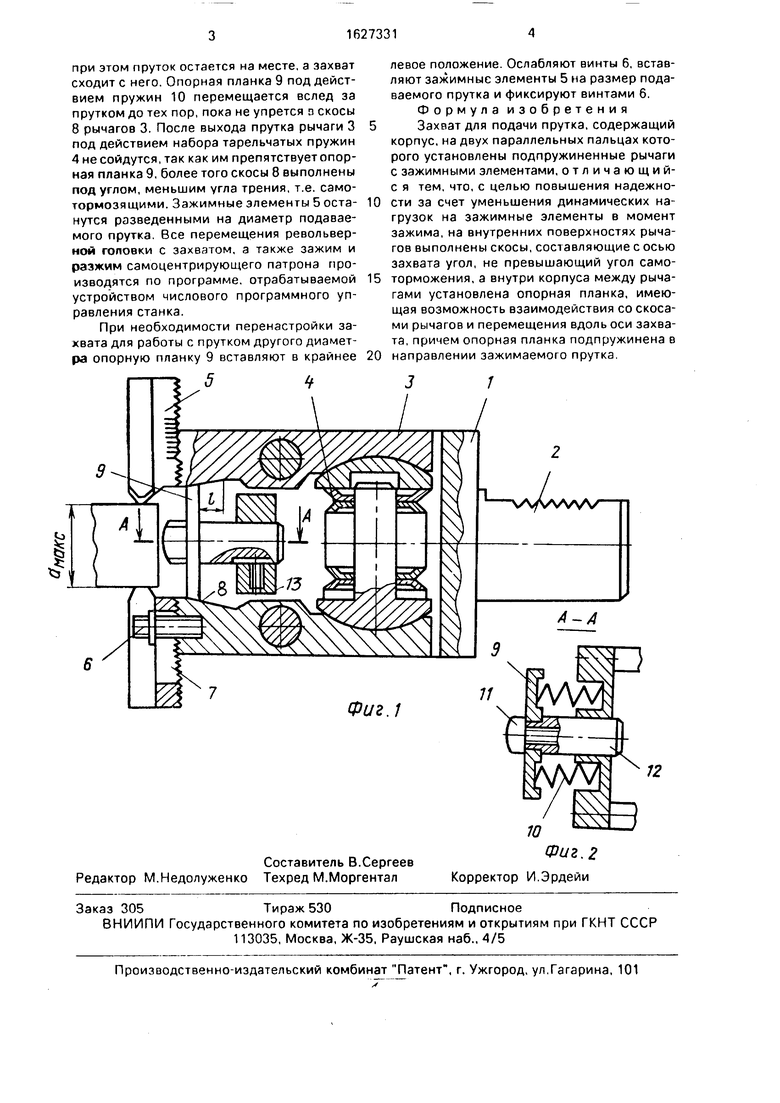
На фиг. 1 представлен захват, общий вид; на фиг. 2 - сечение А-А на фиг. 1.
Захват для прутка состоит из корпуса 1, закрепленного в одной из позиций револьверной инструментальной головки станка с помощью хвостовика 2, и шарнирно связанных с корпусом 1 рычагов 3, подпружиненных набором тарельчатых пружин 4. На рычагах 3 крепятся зажимные элементы 5 винтами 6 с возможностью переустановки за счет наличия пазов 7. С рычагами 3 по скосам 8 взаимодействует опорная планка 9, подпружиненная пружинами 10 и закрепленная винтом 11 на оси 12, которая удерживается от выпадения из отверстия корпуса 1 винтом 13.
Захват работает следующим образом.
Подаваемый пруток закрепляется в механизированном самоцентрирующем патроне токарного станка с ЧПУ (не показан).
Захват, закрепленный в одной из позиций револьверной инструментальной головки станка с помощью хвостовика 2, перемещается по оси прутка совместно с револьверной головкой и наезжает на пруток. Предварительно зажимные элементы 5 настраивают на размер прутка, поэтому пруток свободно проходит между зажимными элементами 5 и толкает через винт 11 опорную планку 9 на расстояние I, сжимая пружины 10, при этом рычаги 3 под действием набора тарельчатых пружин 4 посредством зажимных элементов 5 зажимают подаваемый пруток. После этого зажимные элементы самоцентрирующего патрона разжимаются, освобождая пруток, а револьверной головке совместно с захватом и прутком задается перемещение вдоль оси прутка и происходит вытягивание прутка из патрона на нужную длину (не показано). По достижении необходимой длины прутка его снова зажимают в патроне, а захват продолжает перемещаться за счет того, что усилие зажима в патроне на порядок выше, чем в захвате,
СП
с
о
ю VJ со со
при этом пруток остается на месте, а захват сходит с него. Опорная планка 9 под действием пружин 10 перемещается вслед за прутком до тех пор, пока не упрется з скосы 8 рычагов 3. После выхода прутка рычаги 3 под действием набора тарельчатых пружин 4 не сойдутся, так как им препятствует опорная планка 9,более того скосы 8 выполнены под углом, меньшим угла трения, т.е. самотормозящими. Зажимные элементы 5 оста- нутся разведенными на диаметр подаваемого прутка. Все перемещения револьверной гоповки с захватом, а также зажим и разжим самоцентрмрующего патрона производятся по программе, отрабатываемой устройством числового программного управления станка.
При необходимости перенастройки захвата для работы с прутком другого диаметра опорную планку 9 вставляют в крайнее
- 5t
левое положение. Ослабляют винты 6, вставляют зажимные элементы 5 на размер подаваемого прутка и фиксируют винтами 6. Формула изобретения Захват для подачи прутка, содержащий корпус, на двух параллельных пальцах которого установлены подпружиненные рычаги с зажимными элементами, отличающий- с я тем, что, с целью повышения надежности за счет уменьшения динамических нагрузок на зажимные элементы в момент зажима, на внутренних поверхностях рычагов выполнены скосы, составляющие с осью захвата угол, не превышающий угол самоторможения, а внутри корпуса между рычагами установлена опорная планка, имеющая возможность взаимодействия со скосами рычагов и перемещения вдоль оси захвата, причем опорная планка подпружинена в направлении зажимаемого прутка.
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для подачи прутка | 1989 |
|
SU1703263A1 |
| Захват для подачи прутка | 1990 |
|
SU1796342A1 |
| Устройство для захвата прутка на станках с ЧПУ | 1986 |
|
SU1335371A1 |
| Захват для подачи прутка | 1986 |
|
SU1395428A1 |
| Устройство для зажима детали | 1984 |
|
SU1225702A1 |
| Устройство для направления и подачи прутков | 1989 |
|
SU1678544A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Загрузочное устройство | 1983 |
|
SU1144846A2 |
| ТРЕХКУЛАЧКОВЫЙ САМОЦЕНТРИРУЮЩИЙ ТОКАРНЫЙ ПАТРОН ДЛЯ СКОРОСТНОЙ ОБРАБОТКИ ДЕТАЛЕЙ | 1999 |
|
RU2191093C2 |
| ГОРИЗОНТАЛЬНО-РАСТОЧНОЙ СТАНОК | 1989 |
|
RU2053052C1 |
Изобретение относится к машиностроению и может быть использовано для автоматизации операций загрузки металлорежущего оборудования. Цель изобретения - повышение надежности. В захват, содержащий корпус с подпружиненными рычагами, между последними установлена планка, подпружиненная в сторону прутка и имеющая возможность перемещаться вдоль оси захвата. Планка взаимодействует со скосами, выполненными на внутренних поверхностях рычагов. При захвате прутка последний надавливает на планку и отводит ее от рычагов, давая им возможность зажать пруток. 2 ил.
| Захват для подачи прутка | 1986 |
|
SU1395428A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
