различия их статических и динамических свойств.
Цель изобретения - повышение быстролействия и качества регулирования скорости.
Указаниая цель достигается тем, что в известный электропривод вводится формирователь ЭДС, подсоедииеииый входом к блоку обратного преобразования, а выходом - ко входу внутренней обратной связи канала регулирования потокосцепления. При этом в канале регулирования потокосцепления, содержащем регуляторы внешнего и внутреннего контуров и сумматор компенсирующих связей, регулятор внешнего контура выполняется в виде пропорционального звеиа, регулятор внутреннего контура - в виде последовательно соединенных интегрального и интегрально-пропорционального звеньев, а первый вход компенсирующих обратных связей канала соединен с сумматором компенсирующих связей через интегральнопропорциоиальное звено.
При этом к выходу блока компенсирующих связей с сигналом компенсации для канала регулирования потокосцепления подключено интегро-пропорциональное звено, а вычислительное устройство блока обратного преобразования содержит интеграторы, подключенные входами к .устройствам преобразования фазных напряжений и токов, .а выходами - к формирователю гармонических функций.
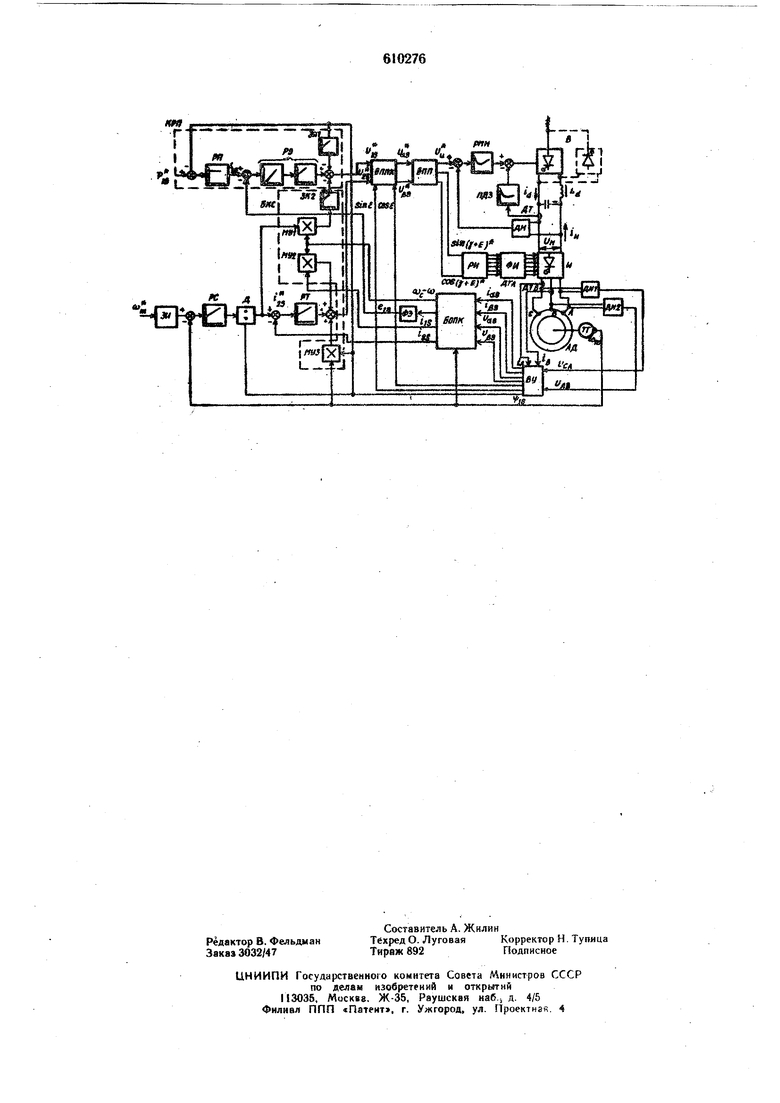
На чертеже представлена функциональная схема предложенного электропривода.
Отличие АД с массивным обмотанным ротором от АД с ротором обычного исполнения состоит в том, что параметры массивного ротора не постоянны, а зависят от скольжения, определяющего глубину проникновения вихревых токов в тело массивного ротора. Это создает значительные трудности при синтезе сиетем автоматического управления. Указанные трудности могут быть преодолены, если произвести математическое описание рассматриваемого типа АД в ор огоналыюй системе координат, одна из осей которой направлена по вектору потокосцепления статора. При этом возможно сохранить достаточную точность математического описания АД при частотном управлении как объекта с сосредоточенными параметрами и одновременно сравнительно точно осуществить привязку к указанной системе координат в силу стабильности параметров статора.
На чертеже обозначеноt- угол между вектором напряжения статора {/(,5 и вектором потокосцепления статора, 5 - угол между указанным вектором и осью статора.
В электроприводе канал регулирования потокосцепления (КРП) содержит во внещнем контуре пропорциональный р1егулятор потокосцеплеиия статора (РП), во внутреннем кон-туре- гулятор ЭДС статора РЭ, состоящий из двух последовательно включенных звеньев ИП- и И-типов. Цепь обратной связи регулятора РЭ подключена к формирователю ЭДС (ФЭ).
Канал регулирования скорости состоит из задатчика интенсивности (ЗЙ), ИП-регулятора CKOpocTVj (PC), делительного устройства (Д) и ИП-регулятора (РТ) активного тока статора
Регуляторы в каждом канале соединены между собой по принципу подчиненного регулпровзиня. Выходы регулятора РЭ и РТ подключены к сумматорам компенсирующих связей, обеспечивающим развязку каналов управлении. Сигналы компенсирующих связей формируются с помощью блока компенсирующих связей (БКС), содержащего множительные устройства МУ1, МУ2 н МУЗ, а также ИП-звеньев компенсации 3KI, ЗК2, блока обратного преобразования переменных (БОПК) и вычислительного устройства (ВУ), соединенных с датчиками фазных токов ДТА, ДТВ, линейных напряжений ДН1, ДН2 двигателя и датчиком Г частоты вращения вала. Выходы сумматоров компенсирующих связей соединены посредством блока прямого преобразования перемен1в)1х БППК со входами блока преобразования переменных (БПП), формирующего сигнал заданного значения И и АЙН и задающие гармонические сигналы sin (3- -f ), cos (jv+ e) угла обобщенного вектора Uj, отсчитываемого от магнитной оси фазы А статора. Сигнал ЦГ подается на вход ЙПД-регулятора РМН-модуля вектора Us, (или входного напряжения АЙН), выходной сигнал которого после суммирования с выход 1ым сигналом датчика (ДТ) входного тока 1„ инвертора И, пропущенным через ПД звено с замедлением ПДЗ, подан на вход системы управления выпрямителем В. Другие выходы блока БПП - sin ( г + ), cos ( ) -(- ) связаны со входами распределителя импульсов (РИ) и формирователя импульсов (ФИ) системы управления инвертором, выходы которого соединены со статором АД. Между выпрямителем В и инвертором И включены дроссель Ld и конденсатор С силового фильтра. Сигнал обратной связи регулятора РМН подается с выхода датчика входного напряжения ииверЩ а ДН).
Чтобы стабилизировать качественные показате;и переходиого процесса регулироваиия момейта при изменении потокосцепления ротора, вход «делитель делительного устройства Д связан с выходным сигналом У) s блока ВУ.
При формировании сигналов fls, cos, sin в блоке ВУ нет необходимости в использовании датчиков Холла, устанавливаемых в воздушном зазоре двигателя. Необходимые для формирования гармопимеских функций составляющие потокосцеплеиия в осях статора получаются здесь в результате интегрирования составляющих ЭДС, вычисляемых по принципу компенсации паления напряжения на активном сопротивлсмши статора. Возможно использование в качестве зконьов компенсации 3KI, ЗК2 форсирующих с замедлением звеньев. При этом в регуляторе ЭДС РЭ вместо ИП-звена может быть использовано форсирующее с замедлением звено.
Указанные незначительные изменения более строго учитывают специфику регулировани асинхронного двигателя с массивным Обмотаниым ротором.
Электропривод в типовом режиме пуска работает следующим образом.
Сначала подается.задающий сигнал %б на вход регулятора РП, который, компенсируя большую постоянную времени Т„р объекта, фор г мирует переходный процесс установления заданного потокосцепления статора Vfj, соответствующий модульному оптимуму. Одновременно РП вырабатывает уставку для регулятора ЭДС статора РЭ, который компенсирует большую постоянную времени рассеяния Т двигателя. Регулятор РЭ, в свою .очередь, вырабатывает уставку регулятора РМН входного напряжения инвертора, компенсирующего большие постоянные врем1ени силового фильтра преобразователя частоты и уставку фазового угла вектора напряжения статора. Оптимальный процесс изменения f. формируется совместным действием регуляторов РП, РЭ и РМН.
Затем на вход PC непосредственно подается сигнал задания скорости от ЗИ без промежуточного фильтра (чтобы улучшить динамическую точность регулирования скорости). Одновременно на выходе PC появляется сигнал задания электромагнитного момента, который после прохождения через делительное устройство Д образует сигнал задания активного тока статора . PC компенсирует электромеханическую постоянную времени, а РТ постоннную времени рассеяния.
Контуры регулирования скорости, ЭДС и активного тока статора совместно с контуром регулирования входного напряжения инвертора и каналом управления фазой обобщенного вектора напряжений статора формируют типовую диаграмму электромагнитного момента, соответствующую предписаниям симметричного оптимума, используемого обычно для настройки высококачественных приводов постоянного тока. В результате происходит быстрый разгон АД до заданной скорости.
Таким образом, рассмотренный электропривод построен с учетом специфики асинхронного двигателя с массивным обмотанным ротором. Введение в электропривод формирователя ЭДС, подключенного к регулятору ЭДС в канале регулирования потокосцепления, а также соответствующее выполнение регуляторов и фор-, мирователей сигналов компенсации обеспечивают его высокое быстродействие и качество регулирования скорости.
Формула изобретения
1.Электропривод с асинхронным двигателем .с массивным обмотанным ротором/ содержащий канал регулирования потокосцеплення со входами внешней, внутренней и компенсирующих обратных связей, блок обратного преобразования, подкл1Ьченный входами к датчикам фазных токов и напряжений, а выходом по потокосцепленкю - к входам внешней и первому из компенсирующих обратных связей канала регулирования потокосцепления, и блок компенсирующих связей, подключенный выходом к второму входу компенсирующих обратных связей канала регулирования потокосцепления, отличающийся тем, что, с целью повышения быстродействия и качества регулирования скорости, в него введен формирователь ЭДС, подсоединенный входом к блоку обратного преобразования, а выходом - ко входу внутренней обратной связи канала регулирования потокосцеплений.
2.Электропривод по п. I, отличающийся тем, что канал регулирования гютокосцепления содержит регуляторы внешнего и внутреннего контуров и сумматор компенсирующих связей, при этом регулятор внешнего контура выполнен в виде пропорционального-звена, регулятор внутреннего контура -:в виде последовательно соединенных интегрального и интегрально-пропорционального звеньев, первый вход компенсирующих обратных связей канала соединен с сумматором компенсирующих связей через интегрально-пропорциональное звено.
3.Электропривод по пп. 1, 2, отличающийся тем, что к выходу блока компенсирующих связей с сигналом компенсации для канала регулирования потокосцепления подключено интегро пропорциональное звено
4.Электропривод по пп. 1. 2. 3, отличающийся тем, что блок обратного преобразований) содержит вычислительное устройство с формирователем гармонических функций и два интегратора, входы которых подключены к устройствам преобразования фазных напряжений к токов, а выходы - к формирователю гарметноеских функций.
Источники информации, принятые но вяимание при зксиертизе:
1.Кочетков В. Д. др. Принципы построения частотно-регулируемых асинхронных элект роприврдов большой мс«цностн, «Электротехнн ка № 10, (974 г.
2.Заявка № 2141092/07 кл. Н 02 Р 7/36, 02.06.75, но которой принято решение о выдаче авторского свидетель.ства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Электропривод переменного тока | 1975 |
|
SU661705A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |