Изобретение относится к горной автоматике, в частности к системам управления забойными машинами, и может быть использовано при создании систем управления с полустационарных постов, рассредоточенных по лаве.
Целью изобретения является увеличение числа управляемых объектов.
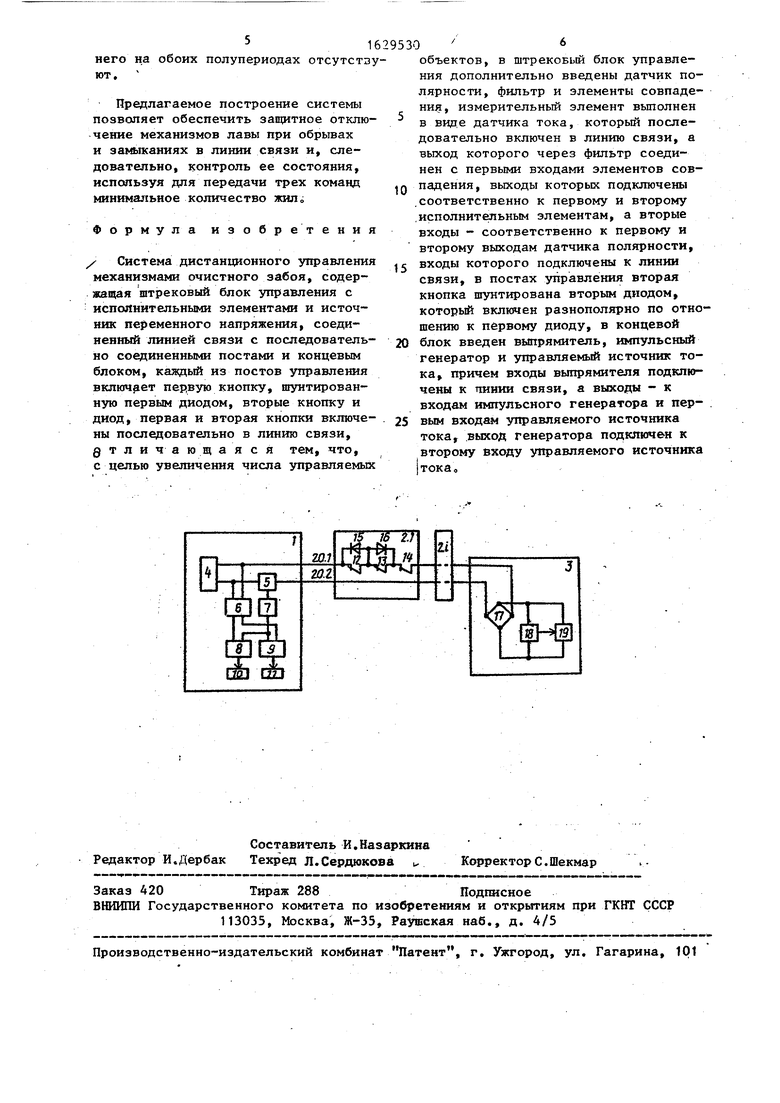
На чертеже приведена функциональ - ная схема предлагаемой системы дистанционного управления механизмами очистного забоя.
Система содержит штрековый блок 1 управления, посты 2„1-2,1 управления, концевой блок 3.
Блок 1 источник 4 переменного напряжения, датчик 5 тока, датчик 6 полярности напряжения в линии связи, Фильтр 7, первый 8 и второй 9 эле- ,менты совпадения, первый 10 и второй 11 исполнительные элементы (реле).
Посты 201-2.1 управления содержат первую 12, вторую 13, третью 14 кнопки и первый 15 и второй 16 диодьц
Концевой блок 3 содержит выпрямитель 17, генератор 18 и управляемый источник 19 тока.
Система содержит также двухпроводную линию 20 связи с шинами 20„1 и 20„2„
Источник 4 переменного напряжения выходами подключен к шинам двухпроводной линии 20.1 и 20,2 связи,, Концевой блок 3 соединен с помощью двухпроводной линии 20 связи с штрековым блоком 1 управления через последовательно включенные посты 2„1 -2„1 управления, датчик 6 полярности напряжения в линии связи входами подключен к шинам 2001 и 20„2 двухпроводной линии 20 связи, первый и второй его выходы соединены с первыми входами первого 8 и второго 9 элементов совпадения соответственно, вторые входы которых объединены и подключены к выходу фильтра 7, вход которого соединен с выходом датчика 5 тока, включенного в одну из шин двухпроводной линии 20 связи Выходы блоков 8 и 9 совпадения подключены к соответствующим реле 10 и 11 в постах 2.1-2.1 управления„ Кнопки 12-14 включены последовательно в одну из жил двухпроводной линии 20 связи, причем первая 12 и вторая 13 кнопки шунтированы разнополярно включенными диодами 15 и 16, выпрямитель 17 входами подключен к шинам 20„1 и 20„2 двухпроводной линии 20 связи, а выходами - к входам генератора 18 и управляемого источника 19 тока Выход генератора 18 подключен к входу управляемого источника 19 тока.
Система работает следующим обраJLPJla-
В исходном состоянии во всех постах
10
15
20
25
через шину 20„2 и датчик 5 тока подключен к источнику 4 переменного напряжения. На каждом полупериоде чере выпрямитель 17 запитываются генератор 18 и управляемый источник 19 тока, управляемый выходным сигналом им пульсного генератора 180 При этом в двухпроводной линии 20 связи формируются токовые импульсы с частотой генератора 18, которые выделяются датчиком 5 тока и после обработки, их фильтром 7 в виде видеоимпульсов поступают на вторые входы первого 8 и второго 9 элементов совпадения
Для определенности принимают,что сигнал на первом выходе датчика 6 по лярности напряжения в линии связи появляется при наличии положительного потенциала на шине 2001 относительно шины 20о2 (первый полупериод) а на втором выходе датчика полярност напряжения в линии 6 связи при обратной полярности напряжения (второй полупериод)о В исходном состоянии си налы с выхода фильтра 7 приходят на каждом полупериоде напряжения, оба элемента 8 и 9 совпадения фиксируют наличие сигналов, каждый на своем полупериоде, и включают реле 10 и 11
При нажатии (размыкании) кнопки 12 на одном из постов управления импульсные токовые сигналы от концевого блока 3 приходят в блок 1 тольк на втором полупериоде, когда концевой блок запитывается из-за наличия диода 15, шунтирующего разомкнутую кнопку 12„ На первом полупериоде при данном включении диода 15 концевой блок 3 обесточен, сигналы на выходе 40 фильтра 7 и, следовательно, на выходе элемента 8 совпадения отсутствуют реле 10 отключается, обеспечивая выполнение первой команды.
Для выполнения второй команды 45 должна быть нажата кнопка 13 на одном из постов 2„ При этом через диод 16, шунтирующий эту кнопку, питание концевого блока 3 осуществляется тол ко на первом полупериоде, на втором он обесточен. Так как сигналы на выходе фильтра 7 на втором, полупери оде отсутствуют, элемент 9 совпадения отключает реле 11, обеспечивая
30
35
50
выполнение второй команды
2 кнопки 12-14 замкнуты, выпрямитель ( Для аварийного останова механизоцним входом через нормальномов лавы должна быть нажата кнопка
замкнутые кнопки 12-14 и отрез-14 на одном из постов 2. При этом
ки шины 20.1, а вторым входомконцевой блок обесточен и сигналы с
о10
15
20
25
29530л
через шину 20„2 и датчик 5 тока подключен к источнику 4 переменного напряжения. На каждом полупериоде через выпрямитель 17 запитываются генератор 18 и управляемый источник 19 тока, управляемый выходным сигналом импульсного генератора 180 При этом в двухпроводной линии 20 связи формируются токовые импульсы с частотой генератора 18, которые выделяются датчиком 5 тока и после обработки, их фильтром 7 в виде видеоимпульсов поступают на вторые входы первого 8 и второго 9 элементов совпадения
Для определенности принимают,что сигнал на первом выходе датчика 6 полярности напряжения в линии связи появляется при наличии положительного потенциала на шине 2001 относительно шины 20о2 (первый полупериод), а на втором выходе датчика полярности напряжения в линии 6 связи при обратной полярности напряжения (второй полупериод)о В исходном состоянии сигналы с выхода фильтра 7 приходят на каждом полупериоде напряжения, оба элемента 8 и 9 совпадения фиксируют наличие сигналов, каждый на своем полупериоде, и включают реле 10 и 11.
При нажатии (размыкании) кнопки 12 на одном из постов управления импульсные токовые сигналы от концевого блока 3 приходят в блок 1 только на втором полупериоде, когда концевой блок запитывается из-за наличия диода 15, шунтирующего разомкнутую кнопку 12„ На первом полупериоде при данном включении диода 15 концевой блок 3 обесточен, сигналы на выходе 40 фильтра 7 и, следовательно, на выходе элемента 8 совпадения отсутствуют, реле 10 отключается, обеспечивая выполнение первой команды.
Для выполнения второй команды 45 должна быть нажата кнопка 13 на одном из постов 2„ При этом через диод 16, шунтирующий эту кнопку, питание концевого блока 3 осуществляется только на первом полупериоде, на втором он обесточен. Так как сигналы на выходе фильтра 7 на втором, полупериоде отсутствуют, элемент 9 совпадения отключает реле 11, обеспечивая
30
35
50
него ют.
на обоих полупериодах отсутстзуПредлагаемое построение системы позволяет обеспечить защитное отключение механизмов лавы при обрывах и замыканиях в линии связи и, следовательно, контроль ее состояния, используя для передачи трех команд минимальное количество жил„
Формула изобретения
Система дистанционного управления механизмами очистного забоя, содержащая штрековый блок управления с исполнительными элементами и источник переменного напряжения, соединенный линией связи с последовательно соединенными постами и концевым блоком, каждый из постов управления включает первую кнопку, шунтированную первым диодом, вторые кнопку и диод, первая и вторая кнопки включены последовательно в линию связи, дтличающаяся тем, что, с целью увеличения числа управляемых
объектов, в штрековый блок управления дополнительно введены датчик полярности, фильтр и элементы совпадения, измерительный элемент выполнен в виде датчика тока, который последовательно включен в линию связи, а выход которого через фильтр соединен с первыми входами элементов совпадения, выходы которых подключены соответственно к первому и второму исполнительным элементам, а вторые входы - соответственно к первому и второму выходам датчика полярности, входы которого подключены к линии связи, в постах управления вторая кнопка шунтирована вторым диодом, который включен разнополярно по отношению к первому диоду, в концевой
0 блок введен выпрямитель, импульсный генератор и управляемый источник тока, причем входы выпрямителя подключены к пинии связи, а выходы - к входам импульсного генератора и пер5 вым входам управляемого источника тока, выход генератора подключен к второму входу управляемого источника (тока.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного управления горными машинами | 1983 |
|
SU1146444A1 |
| Устройство телеуправления и предупредительной сигнализации для очистного комбайна | 1987 |
|
SU1446297A1 |
| Система дистанционного управления горными машинами | 1988 |
|
SU1579999A1 |
| Устройство дистанционного управления шахтным групповым автоматическим выключателем | 1986 |
|
SU1427484A1 |
| Система дистанционного управления горными машинами | 1986 |
|
SU1456559A1 |
| Устройство для дистанционного автоматизированного управления шахтными конвейерными линиями | 1986 |
|
SU1579863A1 |
| Устройство для многоточечной сигнализации | 1977 |
|
SU720450A1 |
| Система шахтной телесигнализации с дистанционным питанием | 1984 |
|
SU1243141A1 |
| Устройство для программного управления осью поворотного стенда | 1982 |
|
SU1104468A1 |
| Устройство для управления процессом непрерывного горизонтального литья заготовок | 1982 |
|
SU1100042A1 |
Изобретение относится к горной автоматике и предназначено для управления забойными машинами с полустационарных постов, рассредоточенных по лаве. Пель - увеличение числа управляемых объектово Система содержит штрековый блок 1 управления, соединенный посредством двухпроводной линии 20 связи через посты управления (ПУ) 201-2oi с концевым блокам (КБ) 3. При этом блок 1 содержит источник 4переменного напряжения, датчики 5и 6 соответственно тока и полярности напряжения в линии связи, элементы совпадения (ЭС) 8 и 9, исполнительные реле 10 и 11 и фильтр 7„ ПУ 2 о 1-2„i содержат кнопки 12-14 и дио- ды 15 и 16, а КБ 3 состоит из выпрямителя 17, генератора 18 и управляемого источника 19 тока. При нажатии кнопки 12 на одном из ПУ токовые сигналы от КБ 3 будут приходить в блок 1 только на втором полупериоде, когда КБ 3 запитывается благодаря диоду 15,шунтирующему кнопку 12. На первом полупериоде КБ 3 обесточен., Сигналы на выходах фильтра 7 и ЭС 8 от- / сутствуют, реле 10 отключается, обеспечивая выполнение первой команды Для выполнения второй команды нажимают кнопку 13 о При этом через диод 16,шунтирующий кнопку 13, осуществляется питание КБ 3 только на первом полупериоде, а на втором он обесточен. При этом ЭС 9 отключает реле 11. Для аварийного останова механизмов лавы нажимают кнопку 14 на одном из ПУ 2. При этом КБ 3 обесточен и сигналы с него на обоих периодах отсутствуют Такое построение системы позволяет обеспечить защитное отключение механизмов лавы при обрывах и замыканиях в линии связи и, следовательно, контроль ее состояния, используя для передачи трех команд минимальное количество жил„ 1 ил. (Л о го СО ел 6о
| Устройство дистанционного управления горными машинами | 1974 |
|
SU576409A1 |
| Устройство дистанционного управления горными машинами | 1983 |
|
SU1146444A1 |
