IN9
СО
ю
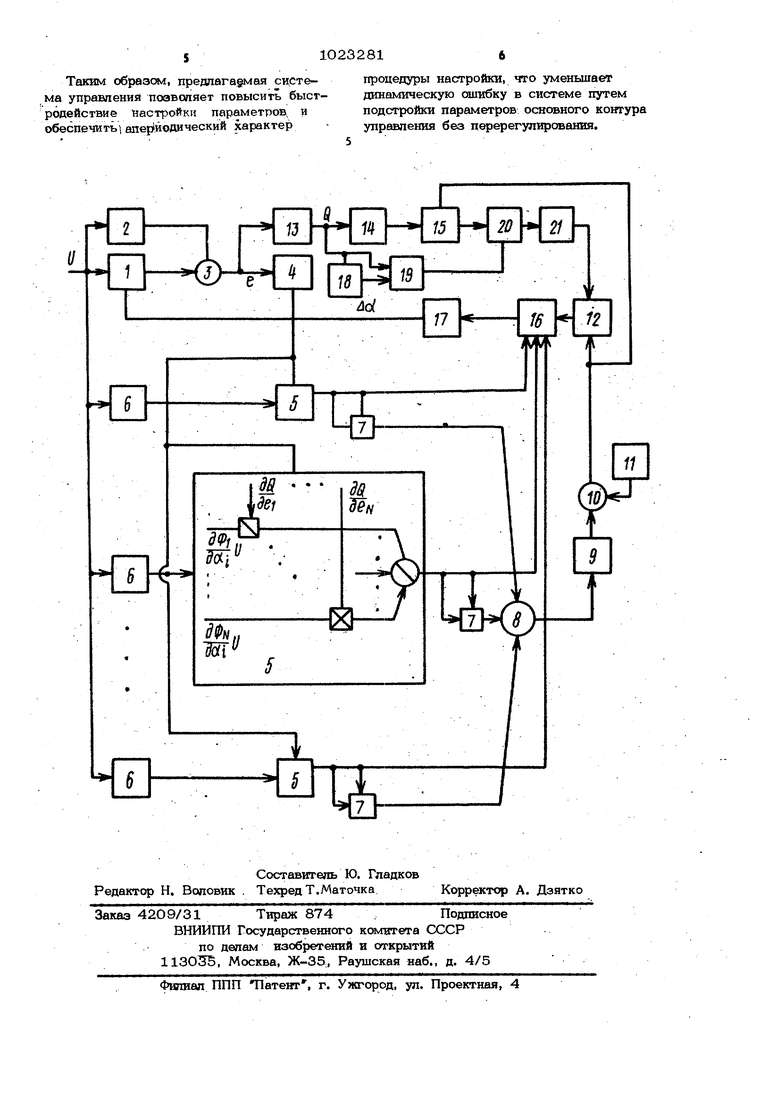
00 Изобретение относится к системам автоматического регутпфования и управления, а Именно к самонастраивающимся системам с моделями, может найти применение при управления объектами с пересменными во времени параметрами. . По основному авт. св. № 877471 известна самонастраивающаяся система управления с эталонной моделью, содержащая N блоков вспомогательных операторов входы которых подключены к входу основного контура управления и входу модели, а выходы через соответствуюише блоки перемножения и суммирования подключейы к входам соответствующих квадраторов и к соответствующим входам первого блока умножения, выходы квадраторов подключены к соответствующим входам первого сум матора, выход которого через первый сглаживающий фильтр подключен к первому входу второго сумматора, к второму вхо. ду-которого подключен источник напряже-. ния смещения, а выход - через последовательно соединенные блок деления, первый блок умножения и интегратор подклк чен к управляющему входу основного контура регулирования, выход которого соединен с управляющим входом основного контура ynpaiNiemm, выход которого соединен с первым входом блока сравнения, второй вход которого соединен с выходом эталонной модели, а выход через блок формирования частных производных критерия настройки по компонентам оишбки. соедине с вторыми входами блоков перемножения и суммирования, а через последовательно соединенные бычислитель критерия настро ки, втфой сглаживающий фильтр и первый усилитель - с вторым входом блока деле ния.jt . .Недостатком .известной системы явля-. ется ее низкая точность при изменении частоты и амплитуды входного сигнала. Цель изобретения - повьпиение точноети системы.. . Поставленная цель достигается тем, что в системе дополнительно установлены дифференциатор, второй блок умножения, третий сумматор и второй усилитель, причем выход первого уситггеля соединен с вторым входом блока деления через последовательно соединенньщ третий сумматф и второй усилитель, вход дифференциатора соединен с первым входсж второго-блока умножения и выходом вычвслнтеяя критерия настройки, а выход - с ъто рым кхоиом второго блока умножения, выход которого соединен с вторым входом третьего сумматора, а выход второго сумматора соединен с вторым входсы первого усилителя. На чертеже изобреясена схема системы управления. Система управления содержит основной контур управления 1, эталонную модель 2, блок 3 сравнения, блок 4 формирования частных производных критерия настройки по компонектам ошибки, блоки 5 перемножения и суммирования, блоки 6 вспомогательных Операторов, квадраторы 7, первый сумматор 8, первый сглаживающий фильтр 9, второй сумматор 1О, источник 11 напряжения смещения, блок 12 деления вычислитель 13 критерия настройки, втОрой / сглаживающий фильтр 14,. первый усилит тель 15, первый блок 16 умножения, интегратор 17, дифференциатор 18, второй блок 19 умножения, третий сумматор 2О, второй усилитель 21. На чертеже приняты следующие обозначения ;е - сигнал ощибки, 9 - критерий настройки, Ф - выходной сигнал i - ого блока вспомогател1зного оператора; Доб- выходной сигнал интегратора 17; и - управляющее воздействие. . Система работает следующим образом. Управляющее воздействие (J подается на вход основного контура управления 1 и его эталонной модели 2, выходные сигналы KOTqpbix сравниваются в блоке 3 сравнения. На входе блсжа сравнения формируется сигнал ошибки в (сигнал сшгабки может формироваться в векторной форме) . Сигнал ошибки в подается на вхОд блока 4 формирования частных производных критерий настройки по компонентам ошибки. Выходной сигнал блока 4, в виде , отдельных компонент поступает на вторые входы соответствующих блоков 5 перемножения и суммирования, на первые входы которых подаются сшналы с выходов, блоков вспомогательных операторов, на входы которых подается управляющее воздействие и ., Выходной сигнал каждого блока 5 поступает на соответствующий ему квaдpaтqp 7, где возводится в квадрат. С йыходов всех квадраторов 7 сигналы поступают на входы первсжо сумматора 8, где они суммируются. Выходной сигнал сумматора 8, пройдя через сшаживаюший фильтр 9, поступает на первый вход сумматора 10 в виде постоянного напряжения. На второй вход сумматора 1О поступает напряжение смещения с выхода источни;на 11, которое суммтфуется с выходным сигналом фильтра 9. Сигнал с выхода сумматора 10 поступает на вход делитель блока 12 деления. напряжения смешения служит для того , чтобы сигнал на входе делитель бпока 12 деления всегда был отличным от нуля. Сигнал оишбки б подается также на вход вычислителя крЕГгерия настройки. В качестве критерия настройки мохтгт быть выбраны модуль сигнала сшибки, квадрат сигнала сшибки и т.д..Выходной сигнал вычисшггеля 13 через фильф 14, в котором сглаживаются его пульсашга, поступает на вход усилителя 15, в KCffopoM. усиливается и затем подается на первый вход третьего сумматора 20. Ксэфшщенч;; усиления усилителя меняется в аависимосгн от исходного Сигнала сумматора 10. Кроме того, сигнал с вйпсода-вычислителя 13 подается на вход диффёренциато ga 18 и первый вход блока 19 умножения на второй вход которого подается выкодной /сигнал дифференциатора 18. На выходе бло ка умножения формируется сигнал, пропорциональный полной производной критерия . настройки Этот сигнал подается на второй вход сулшатора 20, в котором сш суммв5)уется с выходньпл сигналом усилителя 15. Выходной сигнал сумматора 2О усиливается в усилителе 21 И поступает на вход Делитель блока 12 деления. Сигнал с выхода блока 12 деления поступает на один вкз входов блока 16 умножения, в котсфом он по отдепьн;ости перемножается с: выходным сигналом каждого блока 5. Выходнь1е сигналь блоков 5 пропорциона/шны функщхям чувствительности критерия настройки по настраиваемым параметрам основ ного контура управления 1. Сигнал с выхода блока 16 умножений поступает на. вход интегратора 17 (управляющего устройства), в котором форулщэует,ся сигнал управления настройкой параметров основного конпрура управления 1. Выходной сигнал Интегратора 17 воздействует на параметры ocHOBiHoro контура ухфавления 1 такда образсял, его выходной сигнал был равен выходнсзму сигналу эталонной модели 2 в смысле выбранного критерия О. Для пояснения сущности предложенного технического: решения рассмотрим процеДу руформядрования сигнала настройки подробнее. -...--... Сигнал, пропорциональцый прсщзводной от значения критерия настройки О , поступает на сумматсф 20, С ВЫХОДЕЦ суммато ра 2О сигнал, равный Dgrod 9 l/t/Q , и затем - умноженный в усилителе 21 ни коэффициент К, поступает в качестве делимого на вход., блока 12 делена. С цепью обеспечения rpa ReirrHblt процедуры настройки параметров необходимо, чтобы, где ot - подстраиваемые параметры,, qo- новного кошара управлений It , Д - весовые коэф ииенты, которые для упрсшения данной системы управления выбраны лосгоянвыми Д. . Я . Сделаем так, чтобы процедура настройки (1) имела апериодический характер с малым временем переходного nptxiecca. Для этого коэффициент -X в уравнении (1) изменяется по закону .(ligv Qlt Q+-i|-) где К -COV s-t7O - COViS-t- O С - COViSt O , В таком случае полная производная крагерая настройки, равна 3Q (.(aQ/dt) М.1Г М i/L Aib If 9 6011 +с При малом значении постсданной в(емени С получим окончательное вырахсение вида o Klle-ro(it,Qf( d-b Из выражения (З) видно, что при достаточно большом значении коэффициента уевления К усилителя21.величина I Sii.. j .V3t 1+К 1фенефежЕамо мала и значение полной произ водной критерия настройки представляет переменную во времени величину. При большом значении критерда настройки О, а значит и большом значении сигнеяа оигаб™™ Л.КАД XX(44jftCI Л |0W бопыпая,а с ки е величина К|| Q - к уменьшение значе synto, ,- -- - ; В случае, если //grg dQII K нулю, что соответствует моменту окончания подстрой KB параметре осяоеного контура управенвя 1 в ликвидации ошибки, кроме ра- B icT&a ( О , из (3) получаем Е1улю и полной производной крперия настройки dO /dt О.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU877471A1 |
| Квазиоптимальная по быстродействию система управления | 1981 |
|
SU987575A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| Адаптивная система управления | 1982 |
|
SU1071996A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |
САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ по авт. св. I 877471, о т личаюшаяся тем, чгО; с целью повышенюя точности системы, в нее попопннтельно введены дифференциатор, второй . блок умнгакения, третий сумматор и второй усзишгель, причем выход первого усилителя соединен с пторым входом блока деления через последовательно соединенные третий cyMMaTqp и второй усилитель, вход дифференциатора соединен с первым входом второго блока умножения и выходом вычислителя критерия настройки, а выход - с вторым входом второго блока ум- . ножения, выход которого соедини с вторым входом третьего сумматора. Система управления по п. 1., о т л н чающаяся тем, что, выход второго сумматора соединен с вторым входсял первого усилителя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU877471A1 |
| 0 05 В 13/О4, 198О (прототип) | |||
