Изобретение относится к управлению движением судов и может быть использовано для автоматизации управления траекторией движения как крупнотоннажных, так и скоростных судов, например судов на динамических принципах поддержания.
Целью изобретения является повышение точности управления движением судна на криволинейных участках траектории.
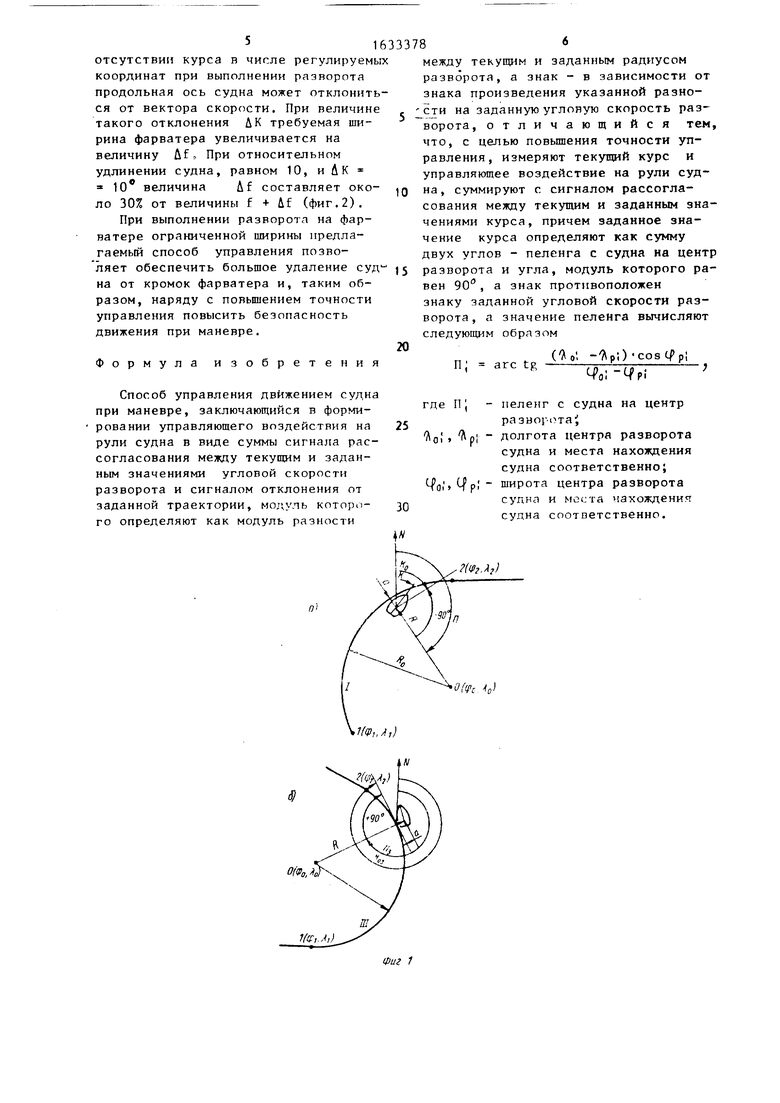
На фиг. 1 изображена схема формирования заданного значения курса, а также отклонения от заданной траектории в соответствии с предлагаемым способом для случаев выполнения поворота вправо (по часовой стрелке 1 и влево (против часовой S), при этом стрелкой показано направление на север, за положительное приращение курса принят поворот судна по часовой стрелке, за положительный угол перекладки руля - отклонение руля на правый борт} на фиг. I - схема осуществления предлагаемого способа управления при движении судна в условиях ограниченного фарватера.
Предлагаемый способ управления движением судна по криволинейному участку траектории, представляющему собой дугу окружности с заданными радиусом и центром, реализуют следующим образом.
Параметрами заданной траектории ячляются географические координаты центра поворота О - широта Cf0 и долгота а, радиус поворота Rp, географические координаты точек начала (tf, ,fl,) и окончания (срг,2) участка
ПОВОрОТп.
Кроме того, к числу заданных параметров движения относятся jaдaннaя угловая скорость поворота 600 и заданоэсо со со 1
00
ный курс К , которые не являются независимыми, а связаны с параметрами заданной траектории следующими соотношениями
-«т (1)
где V - скорость хода судна,
К . « П - 90°
(2)
Для и
случая поворота вправо (фиг.1с|)
К0 П + 90 , (3)
Для поворота влево (фиг.1о), причем пеленг П определяется в соответствии с выражением
СЛо- ft)
П arctg
Знак второго слагаемого в выражениях (2) и (3) определяется направлением поворота - он противоповожен знаку заданной угловой скорости С0в.
В процессе выполнения маневра не- прерывно определяют текущие параметры движения курс К, угловую скорость поворота СО (или, что то же, производную курса К), скорость хода V, географические координаты суд- на С , Ъ , радиус поворота R. Курс К получают от курсоуказателя, скорость поворота СО - от ДУСа или посредством дифференцирования сигнала К, скорость хода V - от лага, географические координаты - от навигационной системы.
Текущий радиус поворота R определяют из соотношения
R (Х л (о-Ч1 + Wo- A -cos fy,
(4)
где oi - коэффициент пропорциональности.
Сигнал отклонения Q от заданной траектории формируют следующим образом.
Модуль этого сигнала определяют как модуль разности между текущим R и заданным RQ радиусами поворота знак сигнала определяют как знак, соответствующий знаку произведения указанной разности на производную курса.
Управление движением судна по предлагаемому способу реализуется подачей на входы исполнительных механизмов рулей комбинации сигналов,
16333784
пропорциональных рассогласованию по курсу, производной курса, отклонения от заданной траектории.
Закон управления (ЗУ) рулями судна реализуют в випе
$
п.
где
и ч ц
Дк &к
&К + пк- Д К + па.
(5)
К - К0 - рассогласование по курсу ;
Сх) - СОц - рассогласование по проиэводной курса , а - отклонение от заданной траектории}ПК nfc na коэффициенты передачи
ЗУ.
Угол перекладки руля Q связан с суммарным сигналом б соотношением
0
5
0
35
40
45
50
55
Ь W.tf,
(6)
где W
сосна ру- курсу
передаточная функция исполнительного механизма.
Предлагаемое использование в таве управляющего воздействия ли сигнала рассогласования по позволяет сохранить в структуре регулятора один из важных контуров местной обратной связи, благодаря чему упрощается решение задачи обеспечения устойчивости управления движением судна при повороте и повышается точность удержания судна на заданной траектории.
Кроме того, сохранение курса в числе регулируемых координат при движении судна на развороте может иметь самостоятельное значение, в особенности в тех случаях, когда фарватер движения ограничен, например, в уз- костях, на акваториях с интенсивным движением и т.п.
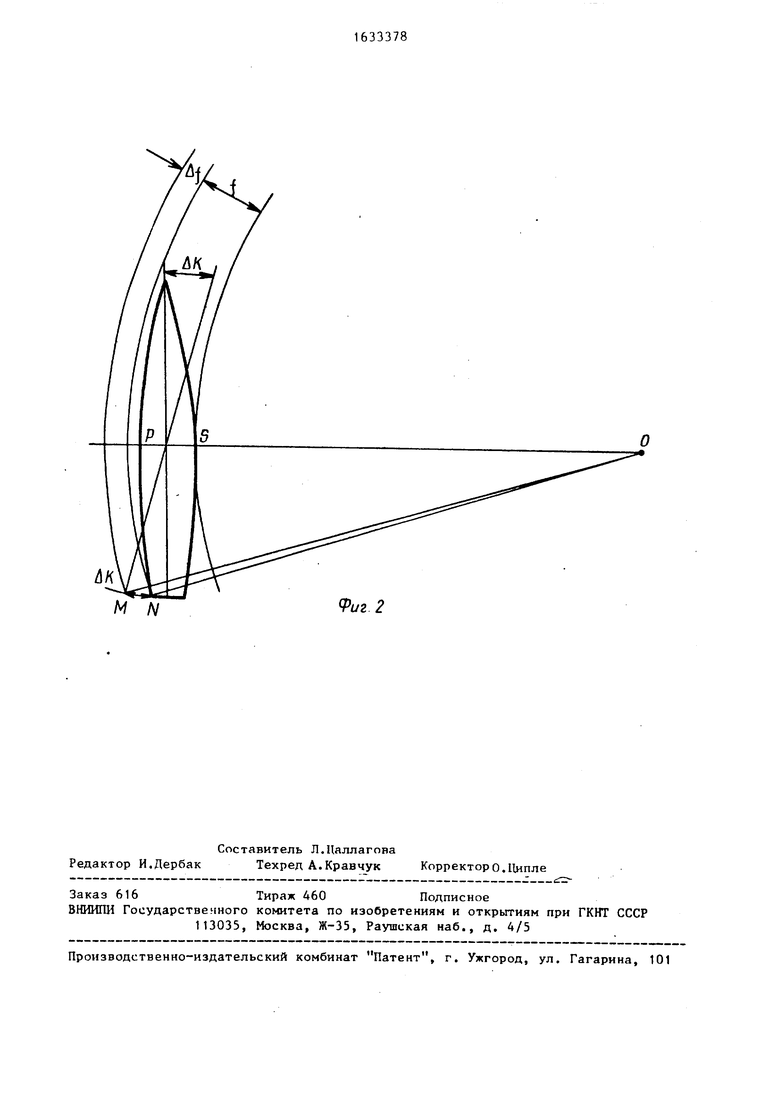
На фиг. 2 в качестве примера показана зависимость требуемой ширины фарватера от используемого способа управления разворотом судна, относительный диаметр установившейся циркуляции которого составляет 2,5, О - центр разворота, Р - центр тяжести судна, S - точка судна, ближайшая к центру 0 в процессе установившегося разворота с нулевым дрейфом, N соответственно наиболее удаленная от О точка судна в процессе выполнения разворота.
В случае установившегося разворота требуемая ширина фарватера (точнее ее нижняя оценка f, обусловленная геометрическими соотношениями, т.е. разностью ON-OS) минимальная. При
отсутствии курса в числе регулируемы координат при выполнении разворота продольная ось судна может отклониться от вектора скорости. При величине такого отклонения ДК требуемая ширина фарватера увеличивается на величину uf При относительном удлинении судна, равном 10, и Л К 10 величина if составляет около 30% от величины f + Af (фиг.2).
При выполнении разворота на фарватере ограниченной ширины предлагаемый способ управления позволяет обеспечить большое удаление суд на от кромок фарватера и, таким образом, наряду с повышением точности управления повысить безопасность движения при маневре.
Формула изобретения
Способ управления движением судна при маневре, заключающийся в формировании управляющего воздействия на рули судна в виде суммы сигнала рассогласования между текущим и заданным значениями угловой скорости разворота и сигналом отклонения от заданной траектории, модуль которого определяют как модуль разности
П
j
между текущим и заданным радиусом разворота, а знак - в зависимости от знака произведения указанной разно- сти на заданную угловую скорость раз-
0
ворота, отличающийся тем, что, с целью повышения точности управления, измеряют текущий курс и управляющее воздействие на рули судна, суммируют с сигналом рассогласования между текущим и заданным значениями курса, причем заданное значение курса определяют как сумму двух углов - пеленга с судна на центр разворота и угла, модуль которого равен 90°, а знак противоположен знаку заданной угловой скорости разворота, а значение пеленга вычисляют следующим образом
П; arc tg
(flo. -flpi) -cosCf pj
4 oi-4V
5
fln,, flo Pi
где П| - пеленг с судна на центр разворота
долгота центра разворота судна и места нахождения судна соответственно; широта центра разворота судна и моста нахождение судна соответственно.
Ч,
М N
Фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления траекторией движения судна | 1983 |
|
SU1102714A1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| Способ автоматического управления движением судна на траектории | 1988 |
|
SU1618700A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2297362C1 |
| Способ натурных испытаний безэкипажных судов | 2022 |
|
RU2797701C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫВОДА СУДНА НА ЗАДАННУЮ ПРЯМОЛИНЕЙНУЮ ТРАЕКТОРИЮ ПРОХОЖДЕНИЯ УЗКОГО УЧАСТКА ФАРВАТЕРА И УДЕРЖАНИЯ ЕГО НА ЭТОЙ ТРАЕКТОРИИ | 2009 |
|
RU2406645C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
Изобретение относится к области управления движением судов. Способ позволяет повысить точность управления движением судна на криволинейных участках траектории. Для решения этой задачи в предлагаемом способе при движении на криволинейных участках траектории, наряду с сигналами рассогласования по радиусу и угловой скорости разворота, на входы исполнительных механизмов рулей подают сигнал рассогласования между текущим и заданным курсом, причем последний формируют в виде алгебраической суммы двух углов пеленга с судна на центр разворота на данном участке траектории и угла, модуль которого равен 40, л знак противоположен -знаку заданной yi ловой скорости разворота на этом участье. 2 ил.
| Способ управления траекторией движения судна | 1983 |
|
SU1102714A1 |
