Изобретение относится к водному транспорту и касается управления движением судна при осуществлении его выхода в условную точку в заданном направлении.
Известны различные способы управления движением судна по заданной траектории, заключающиеся в формировании сигнала, пропорционального отклонению от заданной траектории, и подаче его вместе с сигналами рассогласования по курсу и его производной на вход исполнительного механизма руля (SU 1066896, B63H 25/24; SU 1102714, B63H 25/00; SU 1618700, B63H 25/00).
Недостатками этих способов являются:
- отсутствие возможности непрерывного контроля за положением судна на заданной траектории из-за неоднородности вида траектории (чередующиеся прямолинейные и криволинейные участки);
- использование довольно большого количества расчетных значений параметров для определения сигнала рассогласования по курсу и угловой скорости, а также по отклонению от заданной траектории, в результате чего существенно снижается точность удержания судна на заданной траектории, что неприемлемо при осуществлении выхода в условную точку в заданном направлении;
- исключена возможность достижения основной цели маневра - выхода в условную точку в заданном направлении при отсутствии фиксированного центра поворота в районе выполнения маневра.
Наиболее близким к предлагаемому способу является способ управления траекторией движения судна, заключающийся в формировании сигнала отклонения от заданной траектории и подаче его вместе с сигналами рассогласования по курсу и его производной на вход исполнительного механизма руля (Якушенков А.А. и др. Новые технические средства судовождения. - М.: Транспорт, 1973, с.205, 242). Способ обладает всеми недостатками, которые приведены выше.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в повышении точности управления движением судна для выхода его в условную точку в заданном направлении.
Для достижения указанного технического результата в предлагаемом способе, заключающемся в формировании сигнала отклонения от заданной траектории, подаче его вместе с сигналами рассогласования по курсу и производной по курсу на вход исполнительного механизма руля, дополнительно используют условную точку в заданном направлении, формируют два сигнала отклонения от заданной траектории, первый сигнал определяют как алгебраическую разность между текущим значением пеленга с судна на условную точку (Пут) и текущим значением курса судна (К), второй сигнал отклонения определяют как алгебраическую разность между заданным направлением выхода судна на условную точку (Кзд) и текущим значением курса судна (К), а на вход исполнительного механизма руля подают комбинацию этих сигналов и сигнала производной по курсу (ω) по формуле:
σ=a1(Пут-К)+а2ω+а3(Кзд-К),
где а1, a2, а3 - коэффициенты усиления по соответствующим сигналам.
Кроме того, в случае визуально не наблюдаемой условной точки в заданном направлении значение пеленга с судна на условную точку рассчитывают по формуле:
Пут=arctg {[(λут-λ)cosϕ]/(ϕут-ϕ)},
где λут, λ - долгота условной точки и долгота места положения судна соответственно;
ϕут, ϕ - широта условной точки и широта места положения судна соответственно.
В качестве условной точки используют буй, швартовную бочку, погрузочное устройство и др.
Отличительными признаками предлагаемого способа от указанного выше известного и являющегося наиболее близким являются использование дополнительно условной точки в заданном направлении, формирование двух сигналов, первый из которых определяют как алгебраическую разность между текущим значением пеленга с судна на условную точку (Пут) и текущим значением курса судна (К), второй сигнал отклонения определяют как алгебраическую разность между заданным направлением выхода судна на условную точку (Кзд) и текущим значением курса судна (К), а на вход исполнительного механизма руля подают комбинацию этих сигналов и сигнала производной по курсу (ω) по формуле:
σ=a1(Пут-К)+а2ω+а3(Кзд-К),
где а1, а2, а3 - коэффициенты усиления по соответствующим сигналам.
Кроме того, в случае визуально не наблюдаемой условной точки в заданном направлении значение пеленга с судна на условную точку рассчитывают по формуле:
Пут=arctg{[(λут-λ)cosϕ]/(ϕут-ϕ)},
где λут, λ - долгота условной точки и долгота места положения судна соответственно;
ϕут, ϕ - широта условной точки и широта места положения судна соответственно.
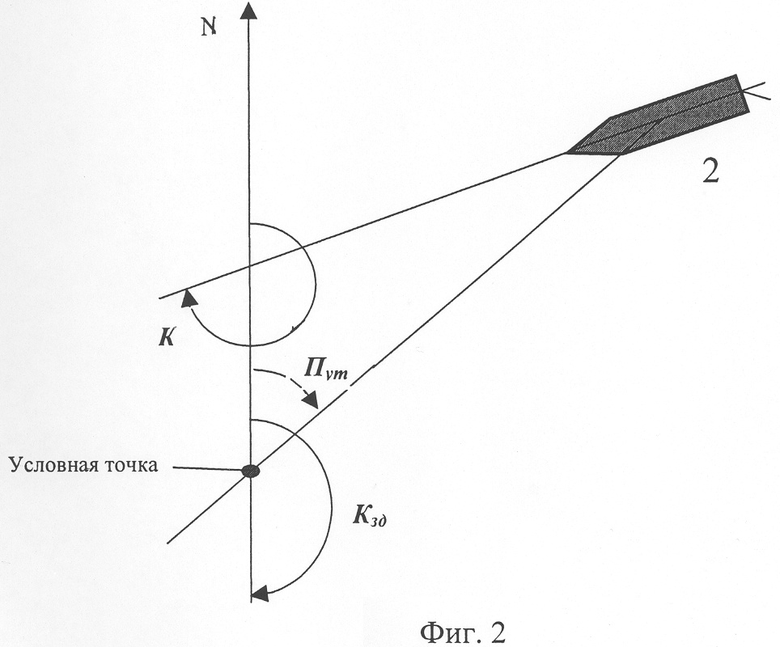
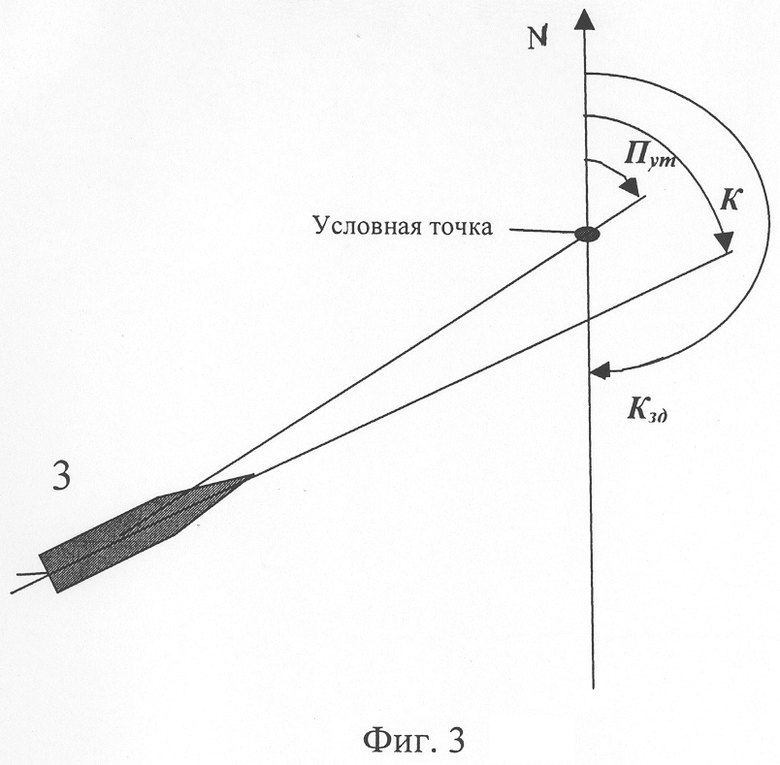
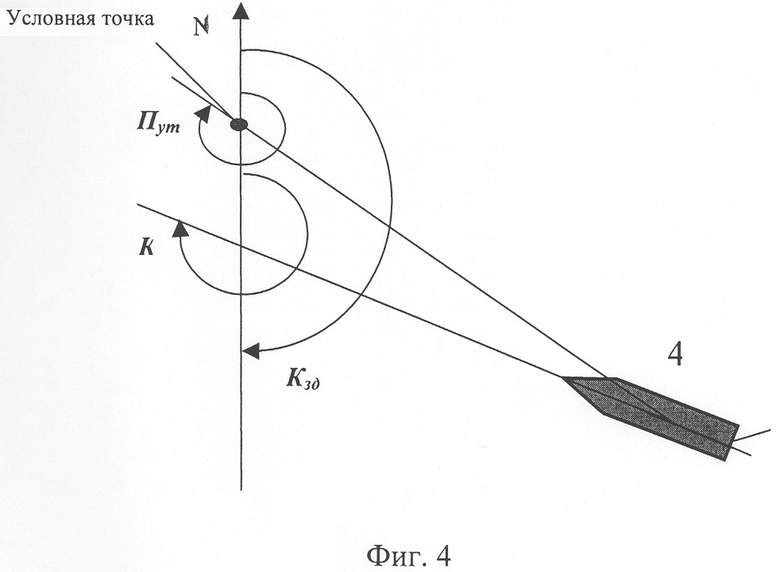
Предлагаемый способ иллюстрируется чертежами, представленными на фиг.1-4.
На фиг.1-4 изображены основные варианты возможных положений судна относительно условной точки при заданном направлении его выхода в нее, причем в данном случае Кзд=180°.
В процессе движения судна из исходного положения (1; 2; 3; 4), как показано на фиг.1-4, в условную точку (буй, швартовная бочка, погрузочное устройство и т.п.) непрерывно осуществляют измерения курса судна (К), пеленга на условную точку (Пут) и угловой скорости поворота судна (ω) или, что то же самое, производной по курсу. Если условная точка является подводным объектом и не может быть наблюдаема визуально, значение пеленга Пут рассчитывают по формуле:
Пут=arctg{[(λут-λ)cosϕ]/(ϕут-ϕ)},
где λут, λ - долгота условной точки и долгота места положения судна соответственно;
ϕут, ϕ - широта условной точки и широта места положения судна соответственно.
При этом координаты условной точки, если она неподвижна, имеют постоянные значения, а координаты судна являются переменными параметрами и измеряют их в непрерывном режиме с использованием судового приемоиндикатора спутниковой навигационной системы (СНС) GPS или той же системы, но с использованием дифференциальных поправок DGPS, обладающей высокой точностью определения координат (±1,0 м).
Сигналы отклонения от заданной траектории (в данном случае их два) формируют следующим образом.
Величину и знак 1-го сигнала определяют как алгебраическую разность между текущим значением пеленга с судна на условную точку Пут и текущим значением курса судна К. Величину и знак 2-го сигнала определяют как алгебраическую разность между заданным направлением выхода судна в условную точку Кзд и текущим курсом судна К.
Управление движением судна для выхода его в условную точку в заданном направлении предлагаемым способом реализуют подачей на вход исполнительного механизма руля комбинации сигналов (Пут-К), ω, (Кзд-К).
Закон управления рулем судна реализуется в виде

где а1, a2, а3 - коэффициенты усиления по соответствующим сигналам.
Угол перекладки руля αr имеет знак, противоположный знаку величины, определяемой зависимостью (2), т.е.

В выражении (3) W - передаточная функция исполнительного механизма.
Предлагаемый способ управления движением судна для осуществления его выхода в условную точку в заданном направлении не исключает подвижности условной точки на плоскости, но для достижения цели рассматриваемого маневра в этом случае необходимо вводить ограничения в соотношения линейной скорости судна υ и линейной скорости движения условной точки υут с учетом их взаимного расположения в момент начала сближения. Так, например, для выхода судна в подвижную условную точку в заданном направлении из исходных позиций 1, 2 (см. фиг.1, 2) необходимо, чтобы указанное соотношение скоростей удовлетворяло условию υym/υ меньше 1,0.
В результате применения данного изобретения достигается возможность получения технического результата - повышение точности выхода судна в условную точку в заданном направлении, таким образом, предлагаемый способ управления движением судна соответствует критерию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением судна при маневре | 1987 |
|
SU1633378A1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2465169C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2515006C1 |
| СПОСОБ ВЫБОРА ИСПОЛНИТЕЛЬНЫХ СРЕДСТВ В СИСТЕМЕ РАСХОЖДЕНИЯ СУДНА С ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2383463C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| Способ управления траекторией движения судна | 1983 |
|
SU1102714A1 |
Изобретение относится к водному транспорту и касается управления движением судна при осуществлении его выхода в условную точку в заданном направлении. При формировании сигнала отклонения от заданной траектории его подают вместе с сигналами рассогласования по курсу и его производной по курсу на вход исполнительного механизма руля. Дополнительно используют условную точку в заданном направлении и формируют два сигнала отклонения от заданной траектории, первый сигнал определяют как алгебраическую разность между текущим значением пеленга с судна на условную точку Пут и текущим значением курса К, второй сигнал отклонения определяют как алгебраическую разность между заданным направлением выхода судна на условную точку Кзд и текущим курсом судна К, а на вход исполнительного механизма руля подают комбинацию этих сигналов и сигнала производной по курсу ω по формуле: σ=a1(Пут-К)+а2ω+а3(Кзд-К), где a1, a2, а3 - коэффициенты усиления по соответствующим сигналам, при этом достигается повышение точности выхода судна в условную точку в заданном направлении. 2 з.п. ф-лы, 4 ил.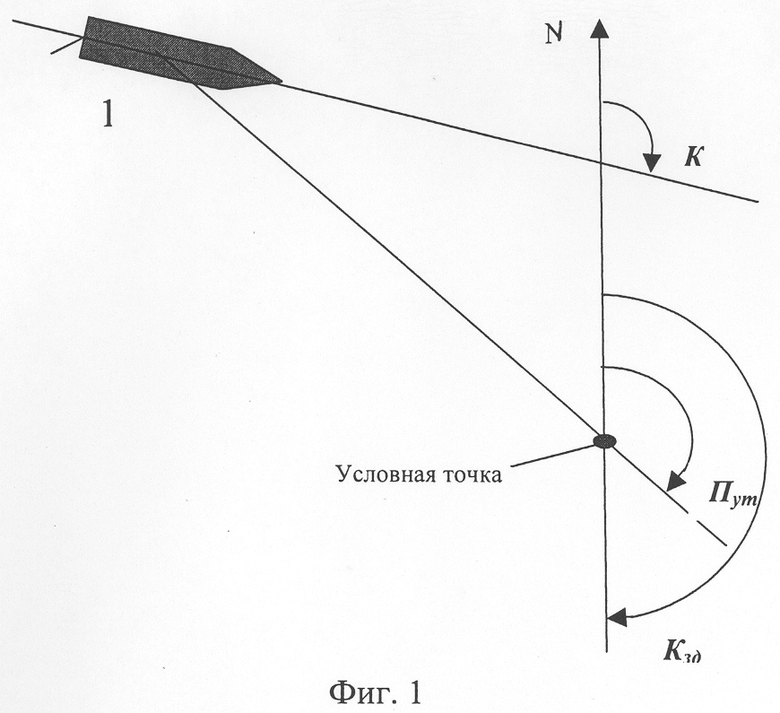
σ=a1(Пут-К)+а2ω+а3(Кзд-К),
где a1, a2, а3 - коэффициенты усиления по соответствующим сигналам.
Пут=arctg {[(λут-λ)cosϕ]/(ϕут-ϕ)},
где λут, λ - долгота условной точки и долгота места положения судна соответственно;
ϕут, ϕ - широта условной точки и широта места положения судна соответственно.
| Способ управления траекторией движения судна | 1983 |
|
SU1102714A1 |
| WO 2005058691 A1, 30.06.2005 | |||
| JP 8119197 А, 14.05.1996. | |||

