Изобретение относится к области судовождения, в частности к системам автоматического управления продольным движением судна.
Известно устройство для проводки судна по узким участкам фарватера, которое содержит измерители вектора продольной скорости судна и скорости поворота корпуса судна в горизонтальной плоскости, измеритель координат и курса судна, внешнюю энергозависимую память, выходами соединенные с микроконтроллером. Устройство предоставляет судоводителю на экране в графической форме информацию о текущем и прогнозируемом положении судна относительно узкого участка фарватера и заданной прямолинейной траектории прохождения этого участка. Задача судоводителя при проводке судна по узкому участку фарватера состоит в том, чтобы с помощью органов управления рулем и тягой движителей судна удерживать условное изображение судна в границах фарватера, показанных на графическом экране (RU 2318187 С1, МПК, G01C 21/14, опубл. 27.02.2008).
Недостатком этого устройства является необходимость ручного высокоточного управления как минимум двойным интегратором. А именно, при постоянной продольной скорости движения судна боковое отклонение является интегралом от путевого угла. В первом приближении путевой угол является интегралом от угловой скорости поворота корпуса судна в горизонтальной плоскости (если пренебречь углом дрейфа и временем реакции привода руля). Известно, что ручное управление двойным интегратором требует от оператора высокого мастерства, достигаемого с помощью длительных тренировок.
Наиболее близким к изобретению является устройство для автоматической проводки судна по узким участкам фарватеров, которое содержит автоматический регулятор путевого угла, датчики угловой скорости поворота судна в горизонтальной плоскости, угла перекладки руля, путевого угла, выходы которых соединены соответственно с первым, вторым и четвертым входами автоматического регулятора путевого угла, снабженного вычислителем заданных параметров и бокового отклонения с тремя входами и вычислителем сигнала управления с шестью входами, первый, второй, третий, четвертый и шестой входы которого образуют одноименные входы автоматического регулятора путевого угла, пятый вход которого образован первым входом вычислителя заданных параметров движения и бокового отклонения, а выход упомянутого автоматического регулятора, образованный выходом вычислителя сигнала управления, подключен к рулевому приводу, механически связанному с рулем, который механически соединен с датчиком угла перекладки руля и корпусом судна, с которым механически связаны датчики путевого угла и угловой скорости поворота судна в горизонтальной плоскости (патент RU 2224279 С1, МПК 8 G01D 1/00, опубл. 20.02.2004).
Недостатком известного устройства для проводки судна по узким участкам фарватера является невысокая точность выведения судна на минимальной дистанции на заданную прямолинейную траекторию прохождения узкого участка фарватера.
Техническим результатом предлагаемого устройства является обеспечение безударного с минимальной погрешностью перехода с траектории одного вида на траекторию другого вида при автоматическом выводе судна на заданную прямолинейную траекторию прохождения узкого участка фарватера и удержании судна на этой траектории.
Указанный технический результат достигается тем, что в устройстве для автоматического вывода судна на заданную прямолинейной траекторию прохождения узкого участка фарватера и удержания его на этой траектории, содержащем автоматический регулятор путевого угла, датчики угловой скорости поворота судна в горизонтальной плоскости, угла перекладки руля, путевого угла, выходы которых соединены соответственно с первым, вторым и четвертым входами автоматического регулятора путевого угла, снабженного вычислителем заданных параметров и бокового отклонения с тремя входами и вычислителем сигнала управления с шестью входами, первый второй, третий, четвертый и шестой входы которого образуют одноименные входы автоматического регулятора путевого угла, пятый вход которого образован первым входом вычислителя заданных параметров движения и бокового отклонения, а выход упомянутого автоматического регулятора, образованный выходом вычислителя сигнала управления, подключен к рулевому приводу, механически связанному с рулем, который механически соединен с датчиком угла перекладки руля и корпусом судна, с которым механически связаны датчики путевого угла и угловой скорости поворота судна в горизонтальной плоскости, в автоматическом регуляторе путевого угла выход вычислителя заданных параметров движения судна и бокового отклонения соединен с пятым входом вычислителя сигнала управления, а его первый и второй входы образуют седьмой вход автоматического регулятора путевого угла, и в устройство введены датчики продольной скорости и координат центра масс судна, выходами подключенные соответственно к третьему и пятому входам автоматического регулятора путевого угла, блок расчета теоретической траектории перехода из начальной точки на заданную прямолинейную траекторию прохождения узкого участка фарватера с шестью входами и тремя выходами и блок постоянной памяти с тремя выходами, в который записаны параметры заданной траектории прохождения узкого участка фарватера, минимальный радиус кривизны траектории движения судна, коэффициенты закона управления, первый выход которого соединен с шестым входом упомянутого автоматического регулятора, а второй и третий выходы блока постоянной памяти подключены к пятому и шестому входам упомянутого блока расчета теоретической траектории, первый, второй, третий и четвертый входы которого соединены соответственно с выходами датчиков координат центра масс судна, путевого угла, угловой скорости поворота судна в горизонтальной плоскости и продольной скорости, первый выход упомянутого блока расчета теоретической траектории подключен к седьмому входу автоматического регулятора путевого угла, а третий выход упомянутого блока расчета теоретической траектории служит для формирования сигнала судоводителю.
Кроме того, устройство отличается тем, что упомянутый блок расчета теоретической траектории содержит последовательно соединенные между собой вычислитель граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера Р0, вычислитель значений параметров d0 и d1, которые обеспечивают минимальную величину максимальной кривизны теоретической траектории выхода судна на заданную прямолинейную траекторию, и блок сравнения, причем первый, второй, третий, четвертый и пятый входы указанного вычислителя граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера Р0 и второй вход блока сравнения образуют с первого по шестой входы упомянутого блока расчета теоретической траектории, его второй выход и второй выход указанного вычислителя значений параметров d0 и d1 образуют первый выход упомянутого блока расчета теоретической траектории, второй выход которого образован выходом блока сравнения.
Изобретение поясняется чертежами, где:
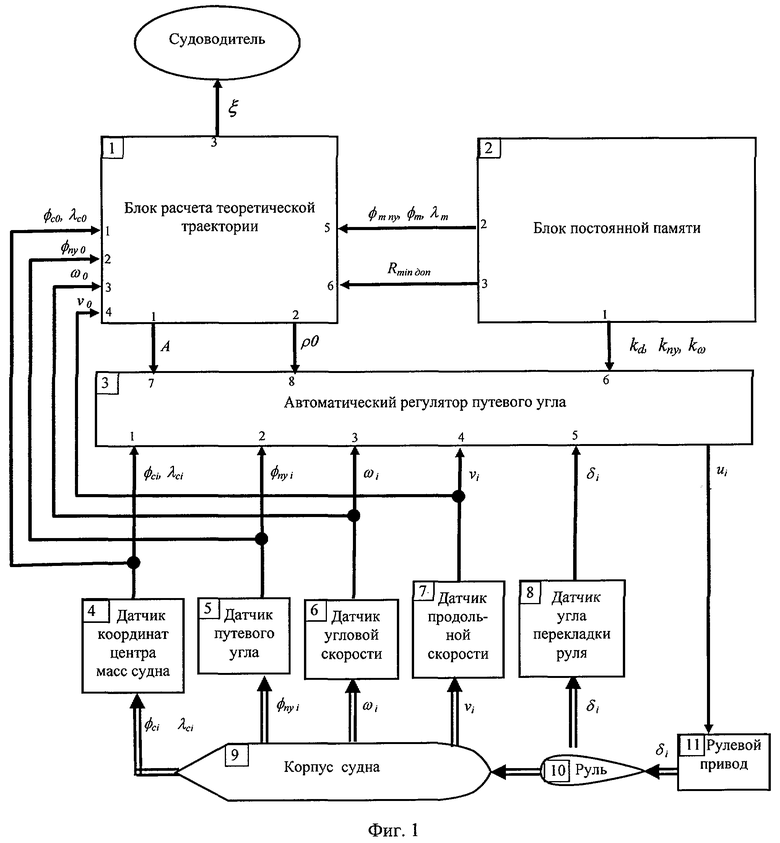
на фиг.1 представлена структурная схема устройства для автоматического вывода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера и удержания его на этой траектории;
на фиг.2 - функциональная схема блока расчета теоретической траектории перехода из некоторой начальной точки на заданную прямолинейную траекторию прохождения узкого участка фарватера;
на фиг.3 - функциональная схема автоматического регулятора путевого угла.
Устройство для автоматического вывода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера и удержания его на этой траектории содержит введенный блок расчета теоретической траектории 1 (фиг.1), введенный блок постоянной памяти 2, автоматический регулятор путевого угла 3, введенный датчик 4 координат центра масс судна, датчик 5 путевого угла, датчик 6 угловой скорости поворота судна в горизонтальной плоскости, введенный датчик 7 продольной скорости, датчик 8 угла перекладки руля. Датчик 4 координат центра масс судна, датчик 5 путевого угла, датчика 6 угловой скорости поворота судна в горизонтальной плоскости, датчик 7 продольной скорости механически связаны с корпусом 9 судна. Датчик 8 угла перекладки руля механически связан с рулем 10 судна, механически связанным с корпусом 9 судна и с рулевым приводом 11. Выходы датчика 4 координат центра масс судна, датчика 5 путевого угла, датчика 6 угловой скорости поворота судна в горизонтальной плоскости, датчика 7 продольной скорости соединены соответственно с первым, вторым, третьим и четвертым входами блока 1 расчета теоретической траектории 1. Выходы датчика 4 координат центра масс судна, датчика 5 путевого угла, датчика 6 угловой скорости поворота судна в горизонтальной плоскости, датчика 7 продольной скорости, датчика 8 угла перекладки руля соединены соответственно с первым, вторым, третьим, четвертым и пятым входами автоматического регулятора 3 путевого угла. Первый выход блока 1 расчета теоретической траектории соединен с седьмым входом автоматического регулятора 3 путевого угла. Второй выход блока 1 расчета теоретической траектории передает информацию судоводителю. Первый выход блока 2 постоянной памяти соединен с шестым входом автоматического регулятора 3 путевого угла. Второй и третий выходы блока 2 постоянной памяти соединены с пятым и шестым входами блока 1 расчета теоретической траектории. Выход автоматического регулятора 3 путевого угла 3 соединен с входом рулевого привода 11.
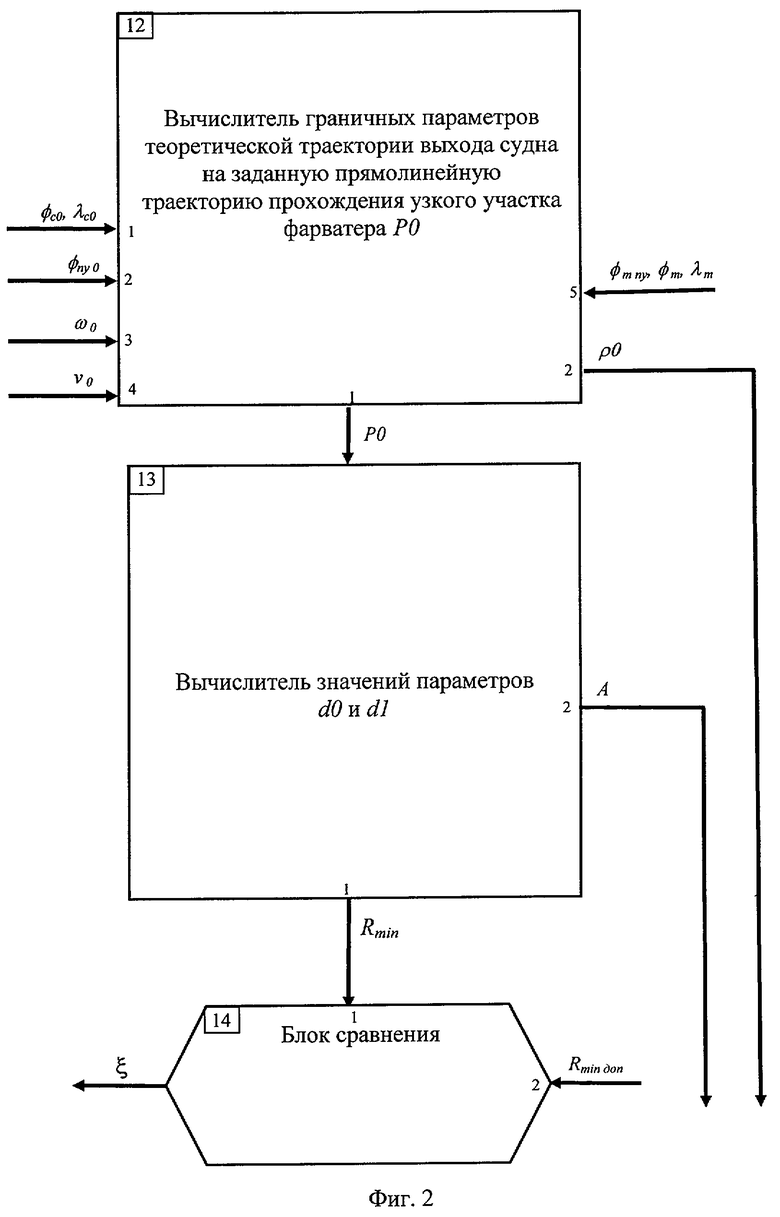
Блок 1 расчета теоретической траектории перехода из некоторой начальной точки на заданную прямолинейную траекторию прохождения узкого участка фарватера содержит последовательно соединенные между собой вычислитель 12 (фиг.2) граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера Р0, вычислитель 13 значений параметров d0 и d1, которые обеспечивают минимальную величину максимальной кривизны теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера, и блок 14 сравнения. Первый, второй, третий, четвертый и пятый входы вычислителя 12 граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера и второй вход блока 14 сравнения образуют с первого по шестой входы блока 1 расчета теоретической траектории перехода из начальной точки на заданную прямолинейную траекторию прохождения узкого участка фарватера. Второй выход упомянутого вычислителя 12 граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера Р0 и второй выход указанного вычислителя 13 значений параметров d0 и d1 образуют первый выход упомянутого блока 1 расчета теоретической траектории, второй выход которого образован выходом блока 14 сравнения.
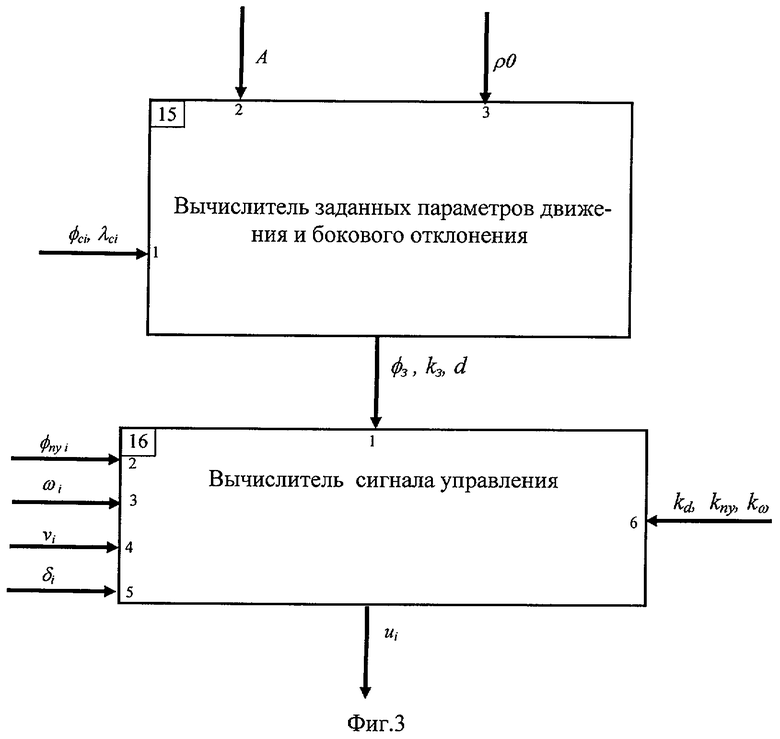
Автоматический регулятор 3 путевого угла содержит вычислитель 15 заданных параметров движения и бокового отклонения, вычислитель сигнала управления 16. Первый, второй, третий, четвертый и шестой входы указанного вычислителя 16 образуют одноименные входы автоматического регулятора 3 путевого угла, пятый вход которого образован первым входом указанного вычислителя 15, а выходом автоматического регулятора 3 путевого угла является выход вычислителя 16 сигнала управления.
Устройство для автоматического вывода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера и удержания его на этой траектории работает следующим образом.
Для обеспечения работы устройства в блок 2 постоянной памяти записываются следующие параметры: координаты начала заданной прямолинейной траектории прохождения узкого участка фарватера широта ϕm, долгота λm и направление ϕm пу, минимальный допустимый радиус кривизны траектории судна Rmin доп, коэффициенты закона управления: коэффициент kd, умножающийся на величину бокового отклонения судна от заданной траектории, коэффициент kϕ пу, умножающийся на отклонение путевого угла от заданного, коэффициент kω, умножающийся на отклонение угловой скорости поворота корпуса судна в горизонтальной плоскости от заданной угловой скорости.
В момент принятия решения судоводителем о выводе судна на заданную траекторию прохождения узкого участка фарватера блок 1 расчета теоретической траектории вырабатывает сигнал ξ, который принимает значение 1, если из текущего состояния движения судна можно выполнять автоматический вывод судна на заданную прямолинейную траекторию прохождения узкого участка фарватера или 0 в противном случае.
Если судоводитель принял решение об автоматическом выводе судна на заданную прямолинейную траекторию прохождения узкого участка фарватера и удержании судна на этой траектории, то с заданной периодичностью цикла управления начинает работать автоматический регулятор 3 путевого угла.
Для обеспечения проведения расчетов введем местную систему координат, при этом начало координат совпадет с началом (ϕm, λm) заданной прямолинейной траектории прохождения узкого участка фарватера, ось Х направлена на восток, ось Y направлена на север.
Когда принимается решение о выводе судна из текущего расположения в точке с географическими координатами (ϕс0, λс0) на заданную прямолинейную траекторию похождения узкого участка фарватера, начинает работать вычислитель 12 граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера Р0. Вычислитель 12 граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера Р0 получает: от датчика 4 координат центра масс судна текущие географические координаты (ϕс0, λc0), от датчика 5 путевого угла текущий путевой угол судна ϕпу0, от датчика 6 угловой скорости 6 текущую угловую скорость поворота корпуса 9 судна в горизонтальной плоскости ω0, от датчика 7 продольной скорости текущую скорость судна ν0, от блока 2 постоянной памяти параметры заданной прямолинейной траектории прохождения узкого участка фарватера ϕm пу, ϕm, λm, причем
ϕm пу - путевой угол в начальной точке заданной прямолинейной траектории прохождения узкого участка фарватера,
ϕm, λm - географические координаты начала заданной прямолинейной траектории прохождения узкого участка фарватера.
Вычислитель 12 переводит географические координаты текущего положения центра масс судна (ϕс0, λс0) и начала заданной прямолинейной траектории прохождения узкого участка фарватера (ϕm, λm) в координаты в местной системе координат r0=(х0,у0)T и r1=(х1,у1)T соответственно.
Вычислитель 12 представляет граничные параметры теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера Р0 в виде упорядоченного набора параметров согласно выражению (1) и передает его в вычислитель оптимальных значений параметров d0m и d1m 13

где r0=(х0,у0)T - двумерный вектор координат начальной точки теоретической траектории в местной системе координат,
r1=(х1,у1)T - двумерный вектор координат начальной точки заданной прямолинейной траектории прохождения узкого участка фарватера в местной системе координат,
ϕпу0 - путевой угол в начальной точке теоретической траектории,
ϕmпу - путевой угол в начальной точке заданной прямолинейной траектории прохождения узкого участка фарватера,
d0, d1 - начальное приближение положительных чисел, определяющих кривизну во внутренних точках теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера,
k0 - кривизна в начальной точке теоретической траектории r0.
Кривизна k0 в точке (ϕс0, λc0) вычисляется с помощью формулы (2)
где ω0 - угловая скорость поворота корпуса судна в горизонтальной плоскости в начальной точке теоретической траектории,
ν0 - продольная скорость движения судна в начальной точке теоретической траектории.
Точка r0 является точкой соединения предыдущей фактической траектории движения судна и начальной точки теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера.
Вычислитель 12 вычисляет расстояние ρ0 в местной системе координат от точки r0 начала теоретической траектории до точки r1 начала заданной прямолинейной траектории прохождения узкого участка фарватера по формуле (3) и передает расстояние ρ0 в вычислитель 15 заданных параметров движения и бокового отклонения

где r0 - двумерный вектор координат начальной точки теоретической траектории в местной системе координат,
r1 - двумерный вектор координат начальной точки заданной прямолинейной траектории прохождения узкого участка фарватера в местной системе координат.
Вычислитель 13 оптимальных значений параметров d0m и d1m работает следующим образом. Для математического описания теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера используется векторный вещественный полином (4)

где коэффициенты полинома a0, a1,…, an - постоянные двумерные векторы,
 ,
,  , …,
, …,  - скалярные базисные полиномы С.Н.Бернштейна. Базисные полиномы Бернштейна определяются формулой (5)
- скалярные базисные полиномы С.Н.Бернштейна. Базисные полиномы Бернштейна определяются формулой (5)

Базисные полиномы Бернштейна используются для представления теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера, так как они обладают более высокой вычислительной устойчивостью, чем обычные степенные полиномы.
Первая и вторая производные полинома R5(u) могут быть представлены выражениями (6) и (7) соответственно


где a0, a1, …, a5 - двумерные коэффициенты полинома R5(u).
При u, изменяющемся от 0 до 1, точка R5(u) перемещается в местной системе координат XY по теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера от начальной точки r0 теоретической траектории до начальной точки r1 заданной прямолинейной траектории прохождения узкого участка фарватера.
Значения параметров d0m и d1m, которые обеспечивают минимальную величину максимальной кривизны теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера, находятся с помощью решения следующей минимаксной задачи (8)

где k(d0, d1, u) - кривизна кривой, задаваемой векторным полиномом R5(u),
km - минимум максимальной кривизны теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера.
Кривизна k(d0, d1, u) вычисляется по известной формуле (9)

где R'5(u) - первая производная по u векторного полинома R5(u),
R''5(u) - вторая производная по u векторного полинома R5(u).
Двумерные коэффициенты a0, a1, … a5, использующиеся в векторных полиномах R5(u), R'5(u), R''5(u), вычисляются по формулам (10)
где r0 - двумерный вектор координат начальной точки теоретической траектории в местной системе координат,
d0m - параметр, который обеспечивает минимальную величину максимальной кривизны теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера,
ϕпу0 - путевой угол в начальной точке теоретической траектории,
k0 - кривизна в начальной точке теоретической траектории r0,
d1m - параметр, который обеспечивают минимальную величину максимальной кривизны теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера,
ϕmпу - путевой угол в начальной точке заданной прямолинейной траектории прохождения узкого участка фарватера.
Коэффициенты А={a0,a1, …, а5} векторного полинома R5(u), соответствующие оптимальным значениям параметров d0m и d1m, найденным в выражении (8), передаются в вычислитель заданных параметров движения и бокового отклонения 15.
Минимальный радиус кривизны Rmin=1/km теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера вычисляется по формуле (11) и передается в блок сравнения 14

Блок сравнения 14 получает от блока 2 постоянной памяти минимальный допустимый радиус кривизны теоретической траектории Rmin доп. Если минимальный радиус кривизны теоретической траектории Rmin меньше минимального допустимого радиуса кривизны траектории судна Rmin доп, то сигналу ξ присваивается 0, что сообщает судоводителю о невозможности вывода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера из текущего положения судна. Судоводитель должен принять решение о переводе судна в другое исходное положение.
Если минимальный радиус кривизны теоретической траектории Rmin не меньше минимального допустимого радиуса кривизны траектории судна Pmin доп, то сигналу ξ присваивается 1, что сообщает судоводителю о возможности вывода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера из текущего положения судна в автоматическом режиме.
Сигнал ξ блок сравнения 14 передает судоводителю для принятия решения о дальнейших действиях.
В автоматическом регуляторе путевого угла в соответствии с длительностью цикла управления в начале работает вычислитель 15, затем вычислитель 16 сигнала управления.
Вычислитель 15 заданных параметров движения и бокового отклонения принимает от датчика 4 координат центра масс судна географические координаты текущего положения центра масс и преобразует их в двумерный вектор координат р в местной системе координат. Для определения отклонения судна от заданного состояния движения вычисляется значение скалярного параметра u с помощью выражений (12)
где р - двумерный вектор координат текущего положения судна в местной системе координат,
r0 - двумерный вектор координат начальной точки теоретической траектории в местной системе координат,
ρ0 - расстояние от начальной точки теоретической траектории до начала заданной прямолинейной траектории прохождения узкого участка фарватера.
В случае нахождения судна вблизи теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера параметр u меньше или равен единице. В случае нахождения судна вблизи заданной прямолинейной траектории прохождения узкого участка фарватера параметр u равен единице. Т.е. вычисленное по формуле (12) значение параметра u обеспечивает нахождение заданного путевого угла ϕпу з, заданной кривизны kз и бокового отклонения d, достаточно близких к текущим значениям переменных состояния движения судна.
Затем с помощью формулы (13) вычисляются координаты касательного вектора Tu в точке теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера, соответствующей значению скалярного параметра u

где R'5(u) - первая производная полинома R5(u),
u - значение параметра, вычисленное с помощью выражений (12).
Заданный путевой угол ϕпу з вычисляется по формуле (14) с учетом того, что путевой угол отсчитывается от направления на север

где Tu2 - координата y касательного вектора Tu,
Tu1 - координата х касательного вектора Tu.
Заданная кривизна kз вычисляется по формуле (15)

где R'5(u) - первая производная по u векторного полинома R5(u),
R"5(u) - вторая производная по u векторного полинома R5(u),
u - значение параметра, вычисленное с помощью выражений (12).
Боковое отклонение d текущего положения судна от заданного вычисляется с помощью скалярного произведения векторов по формуле (16)

где р - двумерный вектор координат текущего положения судна в местной системе координат,
R5(u) - векторный полином, задающий теоретическую траекторию выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера,
u - значение параметра, вычисленное с помощью выражений (12),
е - единичный вектор, перпендикулярный заданному путевому углу ϕпу з.
Вычисленные значения бокового отклонения d текущего положения судна, заданного путевого угла ϕпу з и заданной кривизны kз передаются в вычислитель 16 сигнала управления.
Вычислитель сигнала управления 16 принимает от датчика 5 путевого угла текущий путевой угол судна ϕпу i, от датчика 6 угловой скорости текущую угловую скорость ωi поворота корпуса 9 судна в горизонтальной плоскости, от датчика 7 продольной скорости текущую скорость движения судна νi, от датчика 8 угла перекладки руля текущее положение руля δ1, от блока 2 постоянной памяти коэффициенты закона управления kd, kϕпу, kω.
Сигнал управления ui вычисляется по формуле (17)

где kd - коэффициент, умножающийся на величину бокового отклонения судна от заданной траектории,
kϕпу - коэффициент, умножающийся на отклонение путевого угла от заданного,
kω - коэффициент, умножающийся на отклонение угловой скорости поворота корпуса судна в горизонтальной плоскости от заданной угловой скорости,
d - отклонение текущего положения судна от заданного,
ϕпу i - текущий путевой угол судна,
ϕпу з - заданный путевой угол,
ωi - текущая угловая скорость поворота корпуса судна в горизонтальной плоскости,
kз - заданная кривизна траектории,
νi - текущая скорость продольного движения судна,
δi - текущее положение руля судна.
Вычисленное значение сигнала управления ui передается в рулевой привод 11 для отработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА НОВЫЙ КУРС | 2012 |
|
RU2491509C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2515006C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДХОДА СУДНА К ПРИЧАЛУ | 2009 |
|
RU2403169C1 |
| УСТРОЙСТВО ДЛЯ ПРОВОДКИ СУДНА ПО УЗКИМ УЧАСТКАМ ФАРВАТЕРОВ | 2008 |
|
RU2382987C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| УСТРОЙСТВО ДЛЯ ВЫРАБОТКИ И ИНДИКАЦИИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДНА ПО УЗКИМ УЧАСТКАМ ФАРВАТЕРОВ | 2006 |
|
RU2318187C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
Изобретение относится к области судовождения и может быть использовано в системах автоматического управления продольным движением судна. Устройство содержит автоматический регулятор путевого угла, связанный с рулевым приводом руля и датчиками координат центра масс судна, путевого угла, угловой скорости поворота судна в горизонтальной плоскости, продольной скорости судна и перекладки руля. В устройство введены блок расчета теоретической траектории перехода из начальной точки на заданную прямолинейную траекторию прохождения узкого участка фарватера, блок постоянной памяти, соответствующим образом связанные с вычислителем заданных параметров и бокового отклонения судна и вычислителем сигнала управления автоматического регулятора путевого угла. Техническим результатом является обеспечение безударного автоматического вывода судна на заданную прямолинейную траекторию при переходе с одного вида траектории на другой вид траектории и удержания его на этой траектории с минимальной погрешностью. 1 з.п. ф-лы, 3 ил.
1. Устройство для автоматического вывода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера и удержания его на этой траектории, содержащее автоматический регулятор путевого угла, датчики координат центра масс судна, путевого угла, угловой скорости поворота судна в горизонтальной плоскости, продольной скорости судна, угла перекладки руля, выходы которых соединены соответственно с первым, вторым, третьим, четвертым и пятым входами автоматического регулятора путевого угла, снабженного вычислителем заданных параметров и бокового отклонения с тремя входами, первый вход которого образует одноименный вход автоматического регулятора путевого угла автоматического регулятора путевого угла, и вычислителем сигнала управления с шестью входами, второй, третий, четвертый и пятый входы которого образуют одноименные входы автоматического регулятора путевого угла, первый вход которого образован выходом вычислителя заданных параметров движения и бокового отклонения, а выход упомянутого автоматического регулятора, образованный выходом вычислителя сигнала управления, подключен к рулевому приводу, механически связанному с рулем, который механически соединен с датчиком угла перекладки руля и корпусом судна, с которым механически связаны датчики координат центра масс судна, путевого угла, угловой скорости поворота судна в горизонтальной плоскости, продольной скорости судна, отличающееся тем, что введен блок расчета теоретической траектории перехода из начальной точки на заданную прямолинейную траекторию прохождения узкого участка фарватера с шестью входами и тремя выходами и блок постоянной памяти с тремя выходами, в который записаны параметры заданной траектории прохождения узкого участка фарватера, минимальный радиус кривизны траектории движения судна, коэффициенты закона управления, первый выход которого соединен с шестым входом упомянутого автоматического регулятора, а второй и третий выходы блока постоянной памяти подключены к пятому и шестому входам упомянутого блока расчета теоретической траектории, первый, второй, третий и четвертый входы которого соединены соответственно с выходами датчиков координат центра масс судна, путевого угла, угловой скорости порота судна в горизонтальной плоскости и продольной скорости, первый и второй выходы упомянутого блока расчета теоретической траектории подключены соответственно к седьмому и восьмому входом автоматического регулятора путевого угла, а третий выход упомянутого блока расчета теоретической траектории служит для формирования сигнала судоводителю.
2. Устройство по п.1, отличающееся тем, что упомянутый блок расчета теоретической траектории содержит последовательно соединенные между собой вычислитель граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера Р0, вычислитель оптимальных значений параметров d0m и d1m, которые обеспечивают минимальную величину максимальной кривизны теоретической траектории выхода судна на заданную прямолинейную траекторию и блок сравнения, причем первый, второй, третий, четвертый и пятый входы указанного вычислителя граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватер Р0 и второй вход блока сравнения образуют с первого по шестой входы упомянутого блока расчета теоретической траектории, выход вычислителя оптимальных значений параметров d0m и d1m образует первый выход упомянутого блока расчета теоретической траектории и выход вычислителя граничных параметров теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера Р0 образует второй выход указанного блока расчета теоретической траектории, третий выход которого образован выходом блока сравнения.
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2224279C1 |
| УСТРОЙСТВО ДЛЯ ВЫРАБОТКИ И ИНДИКАЦИИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДНА ПО УЗКИМ УЧАСТКАМ ФАРВАТЕРОВ | 2006 |
|
RU2318187C1 |
| US 5916284 A, 29.06.1999 | |||
| JP 3279867 A, 11.12.1991. | |||

