Изобретение относится к судовой технике и конкретно касается автоматического управления движением судна на траектории.
Цель изобретения - повышение точности управления о
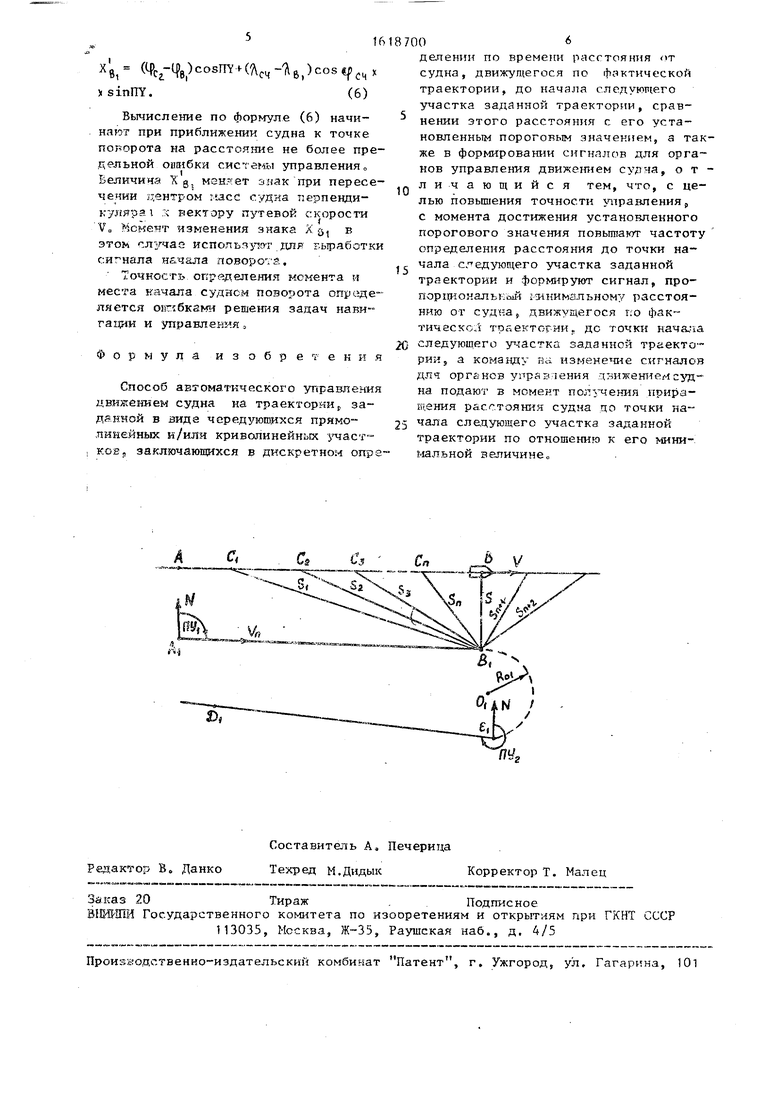
На чертеже показана схема автоматического управления движением судна на траектории.
Способ автоматического управления движением судна В на траектории, заданной, например, в виде чередующихся прямолинейных А,В( Е, Р , и криволинейного ( участков, заключается в дискретном определении по времени расстояния Sj от судна В|, движущегося по фактической траектории АС1С2... до начала Bf следующего участка BjE , заданной траектории и сравнении этого расстояния S, с его установленным пороговым значением Я.за, С момента достижения установленного порогового значения S }дд повышают частоту определения расстояния S. до точки
В
начала следующего участка В, Г,
заданной траектории и формируют сигнал, пропорциональный минимальному расстоянию S от судна Вs движущегося по фактической траектории АС,,С0 .-«, .ф„ до точки В начала следующего участка ВдР заданной траек - тории . Команду на изменение сигналов для органов управления движением суднй В подают в момент получения приращения расстояния судна В до точки. В-., начала следующего участка заданной траектории по отношению к его минимальной величине S.
Способ управления осуществляется следующим образом
Судно движется с текущей путевой скоростью V0
Параметрами заданной траектории A. являются географические, координаты (широта (J и долгота1.) точек начала и конца -участков , j географические -координаты центра поворота О, j заданный радиус поворота R0 | заданный путевой угол на каждом прямолинейном участке траектории} заданная угловая скорость поворота с
Для выполнения разворота с задан- : кок угловой скоростью CA)V с заданным радиусом. RV линейная скорость судна выдерживается в соответствии с выражением
, Управление движением судна по траектории реализуют законом управления вида
ДК + nft-bs(2)
. (j пк- uW п где & К К - К
йк йо
СО о
ъ
в,
п
fe
ti
рассогласование по курсу;
рассогласование по производной курса; отклонение от заданной траектории;; коэффициенты передачи закона управления
При движении. вдоль прямолинейного участка траектории заданный курс является постоянным. На криво™, линейном участке заданный курс опре- д fin я гот в соответствии с выражением
ког
И + 90
О
(3)
где П - пеленг судна на точку 0$ «
Знак + и,ш-т - определяют в соответствии с направлением поворота,
Сигнал перехода с одного участка на другой формируют следующим образом.
В процессе движения судна по указанной траектории с заданной дискретностью определяют расстояние S-; от судна В до точки В. начала говорота в соответствии с выражением
0
5
0
0
5
0
5
0
-(VV ri-V1 -)
гДеСрс-, координаты судна в т
(4) т очч
8, fle
ках «.; s, С „ , „С
г ,
19
координаты точки начала поворота„
При приближении судка к точке Bf на расстояние S., меньше заданного повышают частоту определения расстояния S „
За начало поворота принимают момент пересечения судном прямой ВВ( , проходящей через точку R( сочленения участков и пгрпендикулярнсй направ- путевой скорости В этот момент величина S; , равная S,, будет минимальной.
.После достижения судном минималь™ ного расстояния от точки В это расстояние получает приращение Получе- нке приращения используют в качестве сигнала начала поворота,
В качестве точки траекторииs где пс.гт.аит команду на изменение закона управления может быть выбрана не точка сопряжения участков разной кривизны,, а точка траектории, выбранная с некоторым упреждением, учитывающим постепенность изменения угловой скорости судна.
При использований дополнительной информации о курсе или путевом уг- .ле можно также выработать сигнал. соответствующий моменту пересечения центром масс судна : перпендикуляра, к вектору путевой.скорости, восстановленному из точки сочленения участков. Для этой цели определяют координаты точки Bj сочленения участков в горизонтной связанной с судном .системе координат с началом в центре масс В судна Ось X этой системы координат совпадает с вектором путевой скорости V.суднаг ось Y перпендикулярна оси X и направлена на правый борт о Координату ХВ. точки сочленения участков в указанной системе координат определяют в соответствии с выражением
Ч (WcosnYf(,)cos«fc4 х ssinlTY.(6)
Вычисление по формуле (6) начинают при приближении судна к точке поворота на расстояние не более предельной ошибки системы управления Величина X g, меняет знак при пересечении центром масс судна перпендикуляра :с вектору путевой скорости Ґ„ Момент изменения знака Х$, в этом случае используют.для выработки сигнала начала поворота,
Точность определения момента и места качала судном поворота определяется оптсбкгми решения задач навигации и управления,
Формула изобретения
Способ автоматического управления движением судна на траектории,, заданной в вида чередующихся прямолинейных и/или криволинейных участков,, заключающихся в дискретном опре
10
187006
делении по времени расстояния от судна, движущегося по фактической траектории, до начала следующего участка заданной траектории, срав- нении этого расстояния с его установленным пороговым значением, а также в формировании сигналов для органов управления движением судна, отличающийся тем, что, с целью повышения точности управления, с момента достижения установленного порогового значения повышают частоту определения расстояния до точки начала следующего участка заданной траектории и формируют сигнал, про- порнионалъвслй минимальному расстоянию от судна, движущегося по фактической траектории., до точки начала следующего участка заданной траектории, а команду ка изменение сигналов длч органов управления движением судна подают в момент получения приращения расстояния судна до точки на™ 25 чала следующего участка заданной траектории по отношению к его минимальной величине„
15
20
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления траекторией движения судна | 1983 |
|
SU1102714A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2515006C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫВОДА СУДНА НА ЗАДАННУЮ ПРЯМОЛИНЕЙНУЮ ТРАЕКТОРИЮ ПРОХОЖДЕНИЯ УЗКОГО УЧАСТКА ФАРВАТЕРА И УДЕРЖАНИЯ ЕГО НА ЭТОЙ ТРАЕКТОРИИ | 2009 |
|
RU2406645C1 |
| Способ управления движением судна при маневре | 1987 |
|
SU1633378A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДХОДА СУДНА К ПРИЧАЛУ | 2009 |
|
RU2403169C1 |
| СПОСОБ ЗАДАНИЯ ТРАЕКТОРИИ И РЕЖИМОВ ДВИЖЕНИЯ СУДНА | 2014 |
|
RU2550236C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА НОВЫЙ КУРС | 2012 |
|
RU2491509C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2465169C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
Изобретение относится к судовой технике к конкретно касается автоматического управления движением судна на траектории Цель изобретения - повышение точности управления„ Цель достигается тем, что в способе автоматического управления движением судна В на траектории, заданной, например, в виде чередующихся прямолинейных , и криволинейного участков, заключающемся в дискретном определении по времени расстояния S; от судна В, движущегося по фактической траектории ., СПВ до начала В следующего участка В4Е, заданной траектории, и сравнении этого расстояния S j с его установлен- ньы пороговым значением S зод, с момента достижения установленного порогового значения S5a. повышают частоту определения расстояния S, до точки В, начала следующего участка В,Е( заданной траектории А,В4EjГ)j и формируют сигнал, пропорциональный минимальному расстоянию S от судна В, движущегося по фактической траектории ., до точки Bfl начала следующего участка заданной траи ектории А{Б4Е П. Команду на изменение сигналов для органов управления , движением судна В подают в момент получения приращения расстояния судна В до точки В начала следующего участка В Е , заданной траектории AjBjE D по отношению к его минимальной величине S. 1 ил. i О С
А С
С& Сз
с,
| Способ управления траекторией движения судна | 1983 |
|
SU1102714A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
