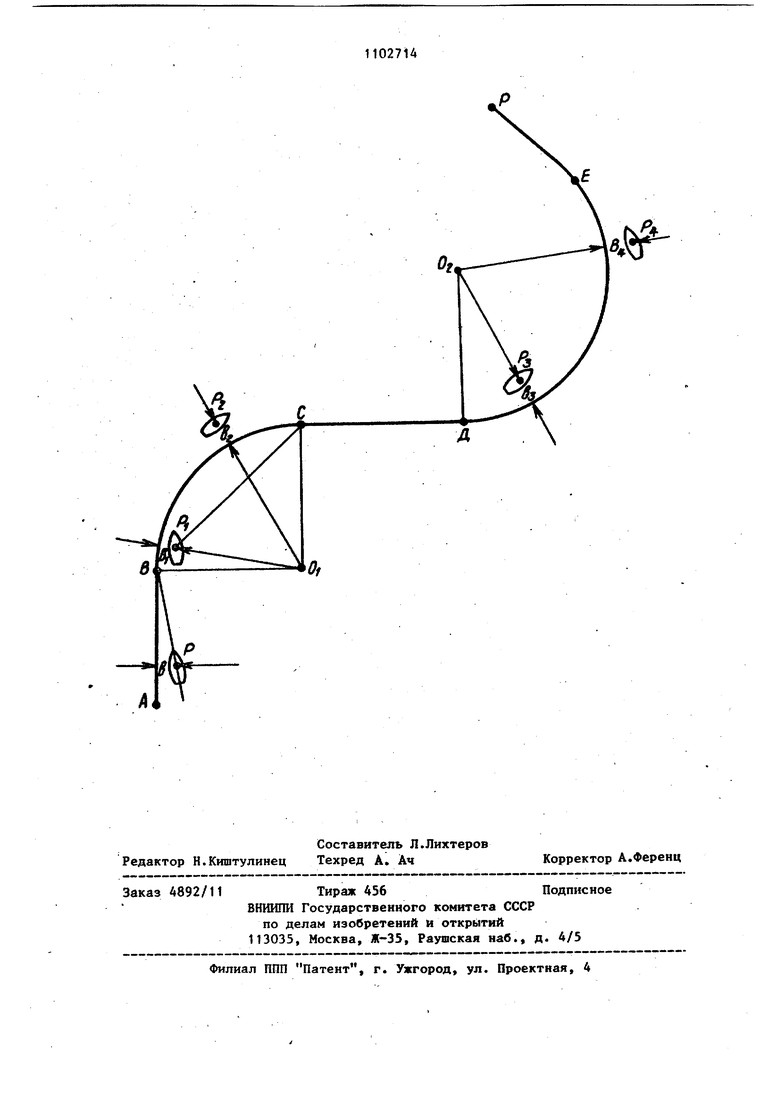
11 Изобретение относится к техничесКИМ средствам управления движением судна, в частности к способам управления траекторией движения. Известен способ управления траекторией движения судна, заключающийся в формировании сигнала отклонения от линии заданного пути и подаче его вместе с сигналами рассогласования по курсу и его производной на входы исполнительных механизмов рулей D Недостатком этого способа является невысокая точность из-за возникно вения разомкнутости контура регулирования npri введении на развороте новых значений курса и рассогласования по курсу. Цель изобретения - повьшение точ(Ности удержания судна на заданной линии, а также удобства управления. Поставленная цель достигается тем что согласно способу управления траекторией движения судна, заключаю щемуся в формировании сигнала отклонения от линии заданного пути и пода че его вместе с сигналами рассогласования по курсу и его производной на входы исполнительных механизмов р лей, линию заданного пути формируют из чередующихся участков прямолинейных .отрезков и дуг окружностей, при этом непрерьгоно определяют расстояние до точки начала следующего участ и по величине этого расстояния форми руют сигнал перехода на следующий участок, причем при движении по криволинейному участку модуль сигнала отклонения от заданной линии равен модулю разности между текущим и заданным радиусами поворота на данном участке, знак сигнала отклонения при нимают противоположным знаку произве дения этой разности на производную курса, а сигнал рассогласования по курсу отключают от входов исполнител ных механизмов рулей. На чертеже представлен пример линии заданного пути, построенной в соответствии с предлагаемым способом и состоящей из пяти участков - трех прямОлинёй;ных (АВ, CD, EF) и двух дуг окружностей (ЕС с радиусом ЕО и ДЕ с радиусом Д02). Предлагаемьй способ реализуется следуюпщм образом. Заданную траекторию (линию заданн го пути) формируют из последователь14 .но чередующихся прямолинейных отрезков и дуг окружностей. Параметрами этой линии являются: географические координаты (щирота СР и долгота и ) точек начала и конца каждого участка А, , D,E, F (точка А является исходной точкой начала движения, точка В - точкой окончания первого участка АВ и начала второго участка ЕС, точка С - соответственно точкой окончания второго участка ЕС и начала третьего участка CD и т.д), географические координаты точек 0|, 2 центров поворота на криволинейных участках траектории, заданный радиус поворота RQ на каждом криволинейном участке траектории; угол курса заданного на каждом прямолинейном участке траектории; заданная угловая скорость разворота (OQ на каждом криво- , линейном участке траектории. t Из перечисленных параметров только географические координаты границ участков линии заданного пути и центров поворота являются независимыми. Остальные параметры связаны с ними следующими зависимостями Ro Bo,ca(q,-4jgf tCAorT efcoS e, где а - коэффициент пропорциональности, ,, ., Urt. 0ircttf-j ОАВё. tfg-Cf 0-1где V - скорость хода судна. Для прямолинейного участка Rg-toVWo-O. Е процессе движения судна непрерывно определяют текущие параметры движения судна: курс (j) , скорость разворота судна по курсу СО (или, что то же, производную курса 1р ), скорость хода судна V, географические координаты судна ( tf , ). отклонекие судна от линии заданного пути 6, расстояние до начала следующего участка, а при движении на криволинейном участке еще и. радиус поворота R. Курс (J получают от курсоуказате ля, скорость разворота со от датчика угловой скорости или дифференцированием сигнала ( , скорость хо311да V - от лага, географические координаты ((О , А ) вьфабатывают в навига ционном комплексе. Расстояние от судна до точки нача ла следующего участка, например до точки В, можно определить по известным координатам судна (точки Р) и точки В, используя геометрическое со отношение, аналогичное соотношению ( BP-a-yl(cf0-tppf4UB- pfcoa 4 P Величина в отклонения от заданной траектории на прямолинейном участке может быть определена из соотношения b--8P-6,n(,k-( ,6- pUost p агс1б ч в-ч-р Текущий радиус поворота R при дви жений по криволинейному участку траектории определяют как расстояние от судна до центра поворота. При известных текущих координатах судна (например, Cfp., - для точки Р, ) и заданных координатах центра поворота .(,,Ао ) текущий радиус определяется из соотношения, аналогичного соотношению (1) «P, Сигнал отклонения от линии заданного пути при движении по криволиней ному участку траектории формируют следующим образом. Модуль этого сигнала определяют как модуль разности между текупщм R и заданным Rg радиус ми поворота на данном участке. Знак сигнала определяют как знак, противо положный знаку произведения указанной разности на производную курса. На чертеже приведены все четыре возмржных сочетания знаков указанных сомножителей - производной курса и отклонения от заданного радиуса разворота. При движении судна по участку ВС траектории (разворот вправо) произво ная курса отрицательна. Ес.ли судно находится в точке PJ, т.е. отклонилось от линии заданного пути в сторо ну приближения к центру поворота 0|, 44 отклонение от заданного радиуса поворота также отрицательно (Rp Rg , . 0) . Следовательно, в этом случае знак произведения этих двух сигналов будет плюс, а знак формируемого сигнала отклонения должен быть минус, т.е. этот сигнал при подаче его на входы исполнительных механизмов рулей должен вызывать перекладку последних в сторону отрицательных углов (для кормовых рулей это соответствует перекладке на левый борт). Если судно находится в точке Р , т.е. отклонилось от линии заданного пути в сторону удаления от центра поворота, разность Р20,-ВО, отрицательна и знак формируемого сигнала отклонения будет плюс, что приводит к перекладке рулей в сторону положительных углов, благодаря чему судно будет возвращено из точки Р„ на дугу ВС. . При движении по участку DE (разворот влево, (j 0) формирование сигнала отклонения от линии заданного пути предлагаемым способом обеспечивает перекладку рулей в направлении, необходимом для возвращения судна на заданную траекторию как из точки Ра так и из точки Р. Управление движет ием судна реализуется подачей на входы исполнительных механизмов рулей комбинации сигналов, пропорциональных рассогласованию по курсу, производной курса отклонения от заданной линии. Исполнитель- , ные механизмы рулей осуществляют суммирование управляющих сигналов, поступающих на их входы. Конструктивно JTO может быть осуществлено, например, если в качестве каждого из входов исполнительного механизма используется своя обмотка управления. Таким образом, при движении по линии заданного пути закон управления рулями судна реализуют в виде )-u(,A4 + K8.b, где л Ц) « Ц), - (J)Q - рассогласование по курсу; &( -СОд- рассогласование , : по производной курса} b - отклонение от заданной траектории; К ц, ,K(A, - передаточные коэффициенты .
Угол перекладки руля Sp связан с суммарным сигналом соотношением
Sp HIA-Jp,
Где ш передаточная функция испонительного механизма.
При движении по прямолинейному участку заданная угловая скорость раворота равна нулю ((, 0), а величи ну з определяют по выражениям (5) и (6).
При движении по криволинейному участку передаточный коэффициент К« D, что эквивалентно отключению сигнала рассогласования по курсу от входов исполнительных механизмов рулей, а величину Ь определяют по модулю и знаку разности R-R с учетом знака производной курса.,
Сигнал перехода с одного участка на другой формируют следующим образом.
В процессе- движения непрерывно (определяют расстояние от судна (от Точки Р) до точки начала следующего участка, используя выражение (4), и сравнивают его с некоторым пороговым значением . В качестве посленего может быть принята величина допустимой максимальной ошибки управления, т.е. допустимого максимального отклонения с
момента выполнения соотношений
BPiE.
Сигнал перехода на следующий участок формируется в виде двузначной пороговой функции от непрерывного аргумента.
,при8Р-е70
)
при BP-es-0
По сигналу перехода с прямолинейного на kpивoлиheйный участок траектории, t.e. при Ф(ВР) 1, осуществляют отключение от входов исполнительных механизмов руЛей сигнала рассогласования Но курсу или, что то же, Переход к значению Кц О, введение в закон управления вместо значения Оо О значения &)б АЛЯ данного криволинейного участкаi изменение метода формирования величины Ь , изменение точки начала следующего участка (С вместо В), по которой формируется пороговый сигнал перехода Ф.
Применение предлагаемого способа позволяет повысить точность удержания судна на заданной линии за счет сохранения замкнутого контура регулирования, а также удобства управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением судна при маневре | 1987 |
|
SU1633378A1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| Способ автоматического управления движением судна на траектории | 1988 |
|
SU1618700A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2297362C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫВОДА СУДНА НА ЗАДАННУЮ ПРЯМОЛИНЕЙНУЮ ТРАЕКТОРИЮ ПРОХОЖДЕНИЯ УЗКОГО УЧАСТКА ФАРВАТЕРА И УДЕРЖАНИЯ ЕГО НА ЭТОЙ ТРАЕКТОРИИ | 2009 |
|
RU2406645C1 |
| Способ натурных испытаний безэкипажных судов | 2022 |
|
RU2797701C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА НОВЫЙ КУРС | 2012 |
|
RU2491509C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2515006C1 |
| СПОСОБ ЗАДАНИЯ ТРАЕКТОРИИ И РЕЖИМОВ ДВИЖЕНИЯ СУДНА | 2014 |
|
RU2550236C1 |
| СПОСОБ НАТУРНЫХ ИСПЫТАНИЙ БЕЗЭКИПАЖНЫХ СУДОВ | 2020 |
|
RU2735694C1 |
СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ СУДНАj заключающийся в формировании сигнала отклонения от линии заданного пути и подаче его вместе с сигналами рассогласования по курсу и его производной на входы исполнительных механизмов рулей, о тличающийся тем, что, с целью повышения точности удержания судна на заданной линии, а также удобства управления, линию заданного пути формируют из чередующихся участков прямолинейных отрезков и дуг окружности, при этом непрерывно определяют расстояние от точки начала следующего участка и по величине этого расстояния формируют сигнал перехода на следующий участок, причем при движении по криволинейному участку модуль сигнала отклонения от заданной линии равен модулю разности между текущим и заданным радиусами поворота на данном-участке, знак сигнала отклонения принимают противоположным знаку произведения этой разности на производную курса, а сигнал рассогласования по курсу отключают от (Л входов исполнительных механизмов рулей. ч .k О э