Изобретение относится к подъемно- транспортной технике и может быть использовано в машиностроении для транспортировки, например, металлической стружки, в металлургической промышленности для транспортировки скрапов и различных компонентов шихты, а также в химической| строительной и других отраслях промышленности.
Целью изобретения является расширение эксплуатационных возможностей
конвейера путем обеспечения дифференцированного изменения скорости движения желоба при прямом и обратном ходах.
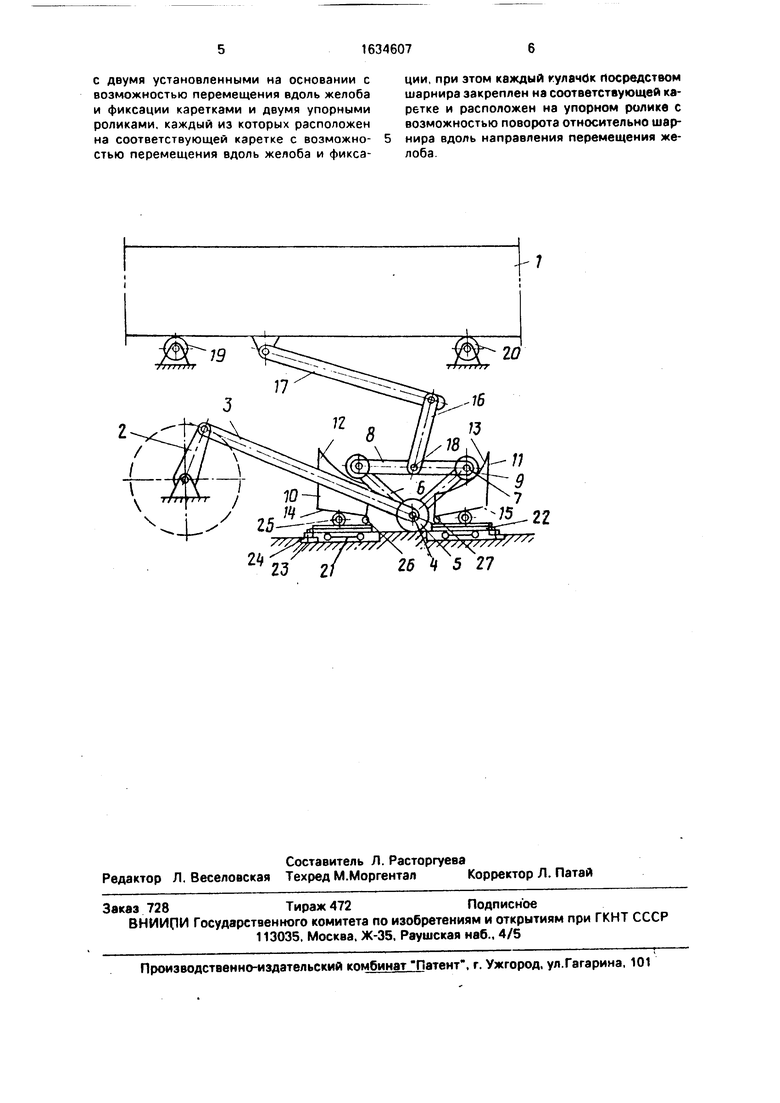
На чертеже схематично изображен конвейер, общий вид.
Инерционный конвейер содержит установленный на основании с возможностью возвратно-поступательного перемещения грузонесущий желоб 1, связанный с желобом 1 привод с кривошипом 2 и шатуном 3, .механизм изменения скорости желоба 1,
выполненный в виде установленного с возможностью возвратно-поступательного перемещения по основанию и закрепленного посредством оси 4 на свободном конце шатуна 3 опорного ролика 5, двух шарнирно связанных одними концами с осью 4 опорного ролика 5 рычагов 6. соединенного с другими концами рычагов 6 посредством осей 7 коромысла 8. двух установленных на последних осях 7 направляющих роликов 9. двух установленных на основании кулачков 10 и 11 с рабочими поверхностями 12 и 13 и опорными поверхностями 14 и 15 и кулисы 16, один конец которой закреплен на коромысле 8, а другой шарнирно связан с желобом 1 посредством тяги 17. Направляющие ролики 9 установлены с возможностью перемещения по рабочим поверхностям 12 и
13кулачков 10 и 11.
Кулиса 16 закреплена на коромысле 8 посредством ,оси 18с возможностью поворота и фиксации. Желоб 1 опирается на катки 19 и 20, установленные на основании.
Кулачки 10 и 11 установлены на двух каретках 21 и 22. имеющих возможность перемещения по основанию вдоль желоба 1, при этом они могут фиксироваться при помощи крепежных элементов 23 в пазах
24,выполненных в основании.
Кулачки 10 и 11 через опорные поверхности 14 и 15 опираются на имеющие возможность движения вдоль направления перемещения каретки два упорных ролика
25,установленные на каретках 21 и 22 с возможностью перемещения вдоль желоба и фиксации в пазах кареток. При этом кулачки 10 и 11 по своим опорным поверхностям
14и 15 соединены с соответствующими ка- ретками 21 и 22 посредством шарниров 26 и 27, а каждый кулачок 1Q и 11 расположен на упорном ролике с возможностью поворота относительно шарнира 26 и 27 вдоль направления перемещения желоба.
Конвейер работает следующим образом.
Включается привод на вращение кривошипа 2, который передает движение шатуну 3 с роликом 5. Ролик 5 перемещается по неподвижному основанию возвратно-поступательно, а коромысло 8, являющееся замыкающим эвеном в кинематическом треугольнике - ролик 5 - ролик 9 - ролик 9. сообщает сложное качательное движение с постоянным угловым отклонением от вертикальной оси. Это угловое отклонение при выбранных геометрических размерах рычагов б и коромысла 8 определяется профилированными поверхностями 12 и 13, а также их взаимным расположением. Этими фактами определяется неравномерность качания
коромысла 8 в течение прямого и обратного ходов, а также величина этих ходов. Так, например, пр й взаимном симметричном сближении кулачков 10 и 11 с профилированными поверхностями 12 и 13 обеспечивается взаимодействие одного ролика 9 с более крутым участком профилированной поверхности, а другого - с выположенным участком профилированной поверхности
противоположного кулачка и наоборот при обратном ходе. Следствием этого является качание кулисы 16 и, соответственно, пере- мощение желоба 1. При несимметричном расположении относительно ролика 5 профилированных поверхностей 12 и 13, как по линейным размерам, так и по угловым (это обеспечивается перемещением кареток 21 и 22 и роликов 25) возможно получение практически множества профилей поверхностей 12 и 13 относительно вертикальной оси, которые и определяют неравномерность хода желоба в любой отрезок времени при прямом или обратном его ходе.
Таким образом, в инерционном конвейере увеличивается диапазон изменения скорости при прямом и обратном ходах желоба и обеспечивается возможность изменения этой скорости в любой отрезок времени, кроме имеющейся возможности изменения
хода положением кулисы 16 относительно коромысла 8.
Формула изобретения
Инерционный конвейер, содержащий установленный на основании с возможностью возвратно-поступательного перемещения грузонесущий желоб, связанный с желобом привод с кривошипом и шатуном и
механизм изменения скорости желоба в виде установленного с возможностью возвратно-поступательного перемещения по основанию и закрепленного при помощи оси на свободном конце шатуна опорного
ролика, двух шарнирно связанных одними концами с осью опорного ролика рычагов, соединенного с другими концами рычагов при помощи осей коромысла, двух расположенных на последних осях направляющих
роликов, установленных с возможностью перемещения по рабочим поверхностям кулачков и кулисы, один конец которой соединен с коромыслом, а другой шарнирно связан с желобом при помощи тяги, о тличающийся тем. что. с целью расширения эксплуатационных возможностей конвейера путем обеспечения дифференцированного изменения скорости движения желоба при прямом и обратном ходах, механизм изменения скорости желоба выполнен
с двумя установленными на основании с возможностью перемещения вдоль желоба и фиксации каретками и двумя упорными роликами, каждый из которых расположен на соответствующей каретке с возможностью перемещения вдоль желоба и фиксации, при этом каждый гулачбк посредством шарнира закреплен на соответствующей каретке и расположен на упорном ролике с возможностью поворота относительно шарнира вдоль направления перемещения желоба
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1988 |
|
SU1541154A1 |
| Инерционный конвейер | 1987 |
|
SU1459982A1 |
| Инерционный конвейер | 1985 |
|
SU1283185A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗДЕЛИЙ ИЗ ПОЛОСОВОГО ШПОНА | 1995 |
|
RU2064862C1 |
| Инерционный конвейер | 1986 |
|
SU1350084A1 |
| АВТОМАТ ДЛЯ РЕЗКИ ПЛАСТИЧНОГО БРУСА | 2015 |
|
RU2581434C1 |
| ВЕЛОМОБИЛЬ | 2009 |
|
RU2434777C2 |
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МНОГОТОПЛИВНОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ С УВЕЛИЧЕННЫМ ХОДОМ ПОРШНЯ МЕТОДОМ ИЗМЕНЕНИЯ СТЕПЕНИ СЖАТИЯ И МНОГОТОПЛИВНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С УВЕЛИЧЕННЫМ ХОДОМ ПОРШНЯ | 1998 |
|
RU2121590C1 |
| Инерционный конвейер | 1991 |
|
SU1787883A1 |
Изобретение относится к подъемно- транспортной технике и м.б. использовано в различных отраслях промышленности. Цель - расширение эксплуатационных возможностей конвейера путем обеспечения дифференцированного изменения скорости движения желоба при прямом и обратном ходах. Инерционный конвейер включает установленный на основании с возможностью возвратно-поступательного движения гру- зонесущий желоб 1, связанный с ним привод с кривошипом 2 и шатуном 3 и механизм изменения скорости желоба. Последний выполнен в виде установленного с возможностью возвратно-поступательного перемещения по основанию и закрепленного посредством оси 4 на свободном конце шатуна 3 опорного ролика (Р) 5 С осью 4 шарнирно связаны одними концами рычаги 6, другие концы которых соединены посредством осей 7 с коромыслом 8. На осях 7 установлены направляющие Р 9, а на основании - кулачки (К) 10 и 11 с рабочими поверхностями 12 и 13 и опорными поверхностями 14 и 15. На коромысле 8 закреплен один конец кулисы 16, другой конец которой посредством тяги 17 связан с желобом 1. Установлены К 10 и 11 на каретках 21 и 22, имеющих возможность перемещения по основанию вдоль желоба 1. Через опорные поверхности К 10 и 11 упираются на имеющие возможность движения вдоль направления перемещения каретки два упорных Р 25, установленные на каретках 21 и 22. При взаимном симметричном сближении К 10 и 11 с профилированными поверхностями 12 и 13 обеспечивается взаимодействие одного Р 9 с более крутым участком профилированной поверхности, а другого - с выполненным участком профилированной поверхности противоположного К и наоборот при обратном ходе. Следствием этого является качание кулисы 16 и, соответственно, перемещение желоба 1. 1 ил. k/ Р сь CJ о о VJ
23
26 Ч 5 27
| Устройство для регулирования температуры | 1975 |
|
SU541154A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
