Изобретение относится к 11ОД ьем ;С1-т)апс портной технике и может бить использо вано в машиност)оении для т;)а 1сиорт}- рО: ки, например, металлической стружки, н r.ie- таллургичеекой прогльинденности для транспортировки СКраПОЗ и раЗЛИЧ1:Ь-л KOVili01i04тов И1ИХТЫ, а также в химической, сгроите; ; - ной и других отрас,:;нх ирол ь илеш-юсти.
Це;1ью изобретения является иовьиненис производительности конвейер-м.
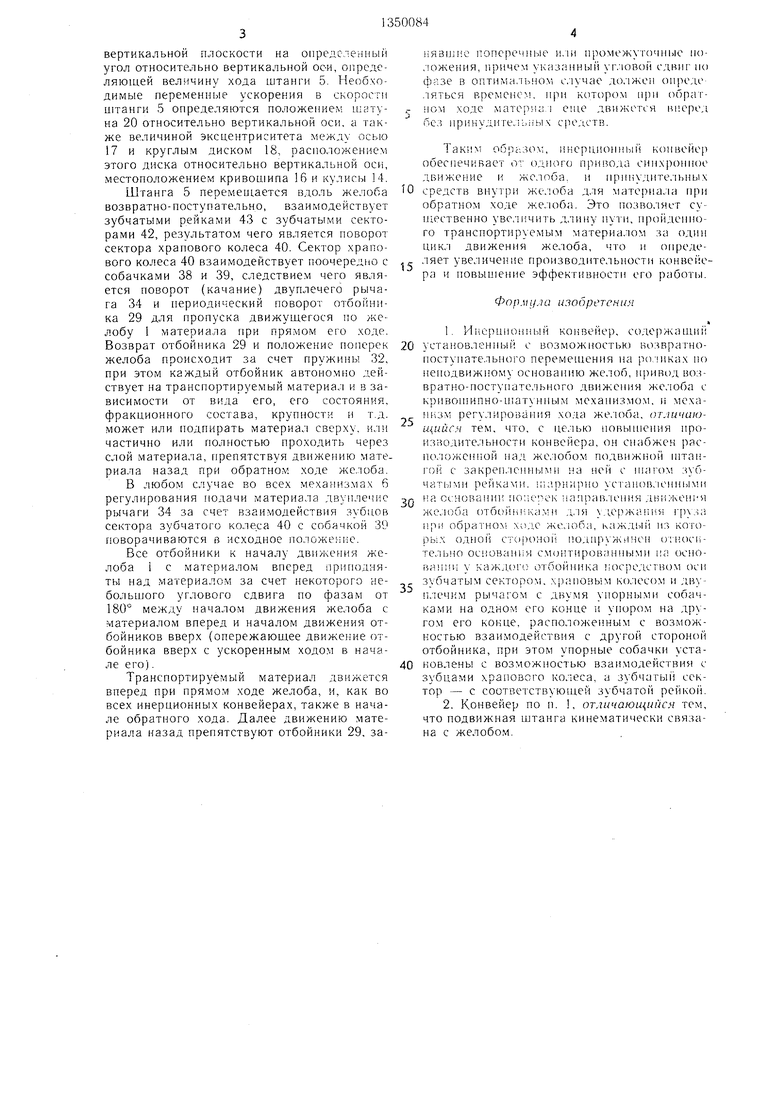
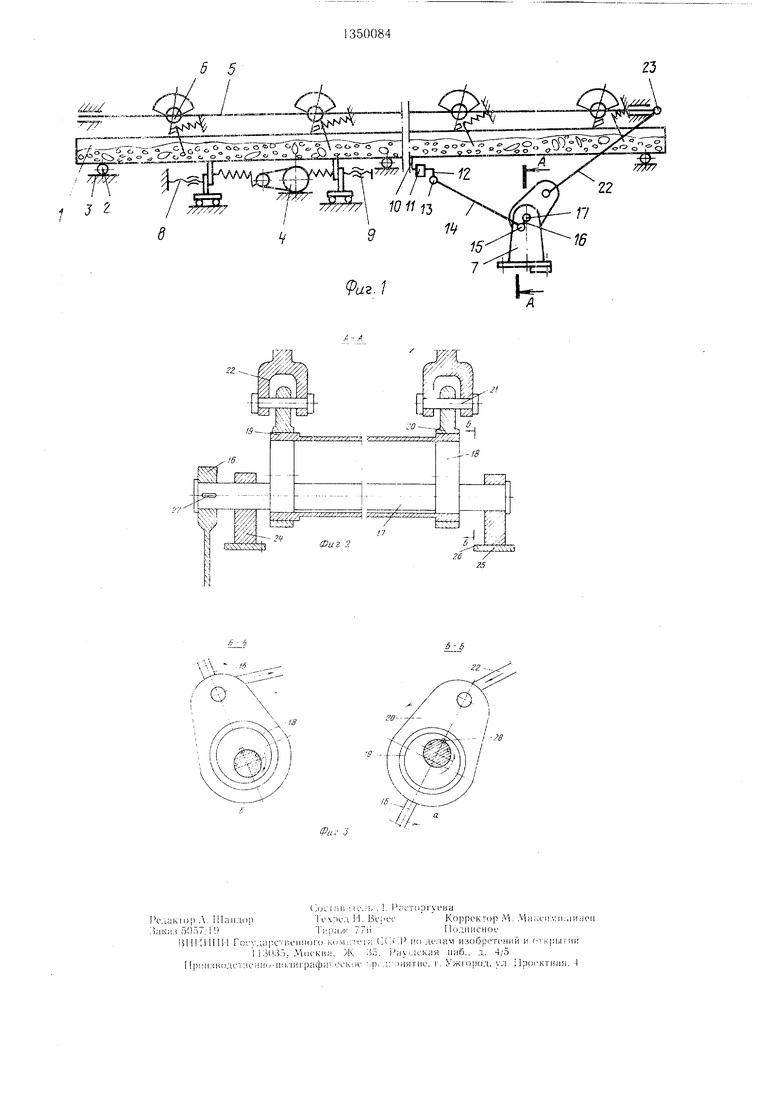
На фиг. 1 схематично изобр; жен niiepUH- онный конвейер, фронта;1ь;1В1Й нид; на фиг. 2 -- разрез А-А на фиг. . на фиг. .3 -- разрез Б - Б на фиг . 2 с различным гю- ложением шатуна н кривошина); яа (|)иг. 4 - узел сопряжения храновогч) ceicTopa с двуплечим рычагом.
Инерционный конвейер состоит ;-з же. ю ба- 1, установленного с возмож -|остью воз- вратно-ностунательиого иере. на ро- „тиках 2, опирающихся на ненодвихнос основание 3 привода 4 возвратиочюстуиатсль- ного движения желоба I с кривоп ипно- И1ату1 ным механизмом, игганги 5, уст ановлен- ной над ,лобом 1 с мехашг мами 6 ре- г улнрования подачн материала нри обратном ход,е желоба, механизма 7 iieiKMam- движения от желоба на инангу 5. Привод 4 содержит устройства 8 и 9 регулирования режима работы желоба 1. По движная П1тан- га 5 кинематически связана с желобом.
Механизм 7 передачи д,5 ижсния желоб;; на цггангу 5 имеет тягу И), жестко закрепленную к желобу 1 и .:()члененн о через соединительную 11 с верти- KajihiUiiM жестким сте|)Ж|;ем i2. имеющим, в очередь, Н1арнир 13 соед; Не пилй с кулисой 14. Ку.тиса 14 посредством Н1а()иира 5 соединена с KpHiiouiHrioM 6, закре1:,ленным другим концом на оси 7 и передающим вращение этой оси. Ось 17 имеет выно.п сн- ный с эксцентриситетом относ;;те.; ь;-1о ueirr- ра.тьной ее оси вращения Ki:,vi-jib i дио-; 18. на наружной новерхнс-сти которого смонтирован опорный обод IP, R iVi pH которого может вращаться л. 13. 0|:Г)р- ный обод 19 услановлен - ; натяг;;: - ь; те.лг/ Н1атуна 20, а HI ату и 20 .яругим концом через шарнир 21 соединен с тягой 22. соединенной, в свою очередь, посредством н;ар- нира 23 со 5 и передаюплсй ей движение.
Ось 17 опирается -ia -стойки 24, заканчивающиеся горизонтал):н.1ми нлнтамк 25, зафиксирова1П-1ыми крепеж ibiMk э темеч- тами 26 к ненодвиж.ному ocnoi a:; :io 3. Кри- вонпи 16 закреплен на оси : , при помонш 1НПОНКИ 27, причем ось 17 несколько П1НОНОЧ11ЫХ пазов для нз:,-П неп --я ;-.:есто- положения кривошина 16 от:к1сит( ос-и 17. 18 установлен и зафикскрова j носительно оси 7 при юмоши изнончи 28 которая может устанавливаться в п.еско; -., ких положениях отпосите. оси 17.
Механизм 6 ре|-у. подачи м;г - риала нри обратном ходе желоба со
0
0
5
0
л.ержит отбойники 29 д.:;я удержания груза нри обратном ходе желоба 1. Гфи этом, каждый отбойник 29 установлен посредством нарнира 30 нг неподвижном основании 3 поперек направлегн1я движения желоба 1, причем Г-; вертика,. положении отбойник 29 находится внутри желоба 1 и перекрывает его в поперечном сечении. Отбойник 29 на из сторон содержит упор 31 в виде полусфепы для взаимодействия с пружиной 32, установленной также на ненодвижном основании 3, т.е. отбойник 29 одной стороной подпружинен относительно основания 3. Пружина 32 имеет направляЮ Щую 33.
Двуплечий 34 имеет на нижнем конце упор 35, заканчивающийся полусферой 36, расположенный с возможноетью вза- -;модействия с другс й стороной отбойника 29. Па другом верхнем конце двупле- чс-го рычага 34 смонтированы на оси 37 унор- пые собачки 38 и 39, установленные с возможностью взаимодействия е зубцами еекто- ра храпового колеса 40, которое имеет рае1Ю.ложенную у Аа; чдого отбойника 29 об- нгую ось 4i с зубчатым сектором 42, уста- новле1- ным с возможностью взаимодействия с соответствующей зубчатой рейкой 43, размещенной па гнтанге 5. Зубчатые рейки 43 закреплены на п танге 5 с njaroM, при этом каждая из них располол-сена напротив со- ответствуюн1е х) 29.
Ось 44 вращения для двуп.лечего рычага 34 установле.на соосно с осью 41.
Инериг;онный конвейер работает следую- Н .нм образом.
Включается iipHBo;:. 4, настроенный на необходимый режим работы, опреде.ляющий производительность конвейера, включаю - ся муфты 1 1 соединительнд 1е, которые долж- обеспечить движение с механизмами 6 регулирования подачи материала при обратных ходах желобов 1. (В практике возможны варианты, когда на отдельных .же;1обах не потребуется работа меха пизмов 6 регулироаа1 ия подачи матерна;1а).
Желоб 1, получающий движение neiioc- редственно от привода, 4, перемегцается по ротикам 2 воззратно-ноступательно с неременным ускорением и скоростью, а находящийся на нем груз стрс мится соверн ить движения: часть никла нкере.-:, в счс-рону его подачи, а часть обратно.
Двнжение желоба 1 передается щтанге 5 следун)н:.нм образом. Движущкйс5; поступательно жело13 1 HepevieniaeT тягу 10 : стер- fi- - ib 12. Пос.педник при движении пере- .-.uMuaoT кулису 14, которая вращает криво- щйп 16. иращгющий ось 17. Далее выпо,- не;:иые с эксцентриситетом круг.лые диски 18 совершают ело;кное движение со свободным враншнием внутри опорного обода 19, который также соверщает сложное дв .жение, пеоедающееся гпатуну 20, противоположный конец которого, где закрепле- lia м арнирно тяга 2:L соверщает качание в
вертикальной плоскости на определенный угол относительно вертикальной оси, определяющей величину хода штанги 5. Необходимые переменные ускорения в скорости штанги 5 определяются положением шатуна 20 относительно вертикальной оси, а также величиной эксцентриситета между осью 17 и круглым диском 18, расположением этого диска относительно вертикальной оси, местоположением кривошипа 16 и кулисы 14.
Штанга 5 перемеи1,ается вдоль желоба возвратно-поступательно, взаимодействует зубчатыми рейками 43 с зубчатыми секторами 42, результатом чего является поворот сектора храпового колеса 40. Сектор храпового колеса 40 взаимодействует поочередно с собачками 38 и 39, следствием чего является поворот (качание) двуплечего рычага 34 и периодический поворот отбойника 29 для пропуска движущегося по желобу 1 материала при прямом его ходе. Возврат отбойника 29 и положение поперек желоба происходит за счет пружины 32, при этом каждый отбойник автономно действует на транспортируемый материал и в зависимости от вида его, его состояния, фракционного состава, крупности и т.д. может или подпирать материал сверху, или частично или полностью проходить через слой материала, препятствуя движепию материала назад при обратном ходе же.лоба.
В любом случае во всех механизмах 6 регулирования иодачи материала двуплечие рычаги 34 за счет взаимодействия зубцов сектора зубчатого колеса 40 с собачкой 39 поворачиваются в исходное пoлoжe п e.
Все отбойники к началу желоба 1 с материалом вперед приподняты над материалом за счет некоторого небольшого углового сдвига по фазам от 180° между началом движения желоба с материалом вперед и началом движения отбойников вверх (опережающее движение отбойника вверх с ускоренным ходом в начале его).
Транспортируемый материал движется вперед при прямом ходе желоба, и, как во всех инерционных конвейерах, также в начале обратного хода. Далее движению материала назад препятствуют отбойники 29, занявшие поперечные и. in промежуточн1 1е но- ,1ожения, причем указанный yr. ioBoii сдвиг по фазе в оптимальном с,1учае до, 1жеп определяться временем, при котором п)н обрат- ,- iioM ходе материи I еще движется без принудпте,:к,ных средств.
Таким обрг;3ом, инерц1 онн1-лй конвейер обеспечивает от одного прщюда синхронное движение и желоба, и прпнудите.чьных
0 средств внутри же, 1оба д,пя материала при обратном ходе же,:1оба. Это нозво, 1нет су- 1дественно увел15чить д, 1ину пути, пройденного транспортируемым материалом за один цикл движения желоба, что и опреде ляет увеличение производительности конвейера и новьиление эффективности его работ 1.
Формула изобретения
. Инерционн.ый конвейер, содержании
0 ) становленный с возможностью возвратно- поступательного перемещения на ро/шках по неподвижному основанию же, 1об, н)ивод во.з- вратно-постунательного движения же.юба с кривоп1ипно-п1ат нным механизмом, и меха- fni3M регулирования хода же.юба, отличающийся тем, что, с це.лью повышения про- изнодительности конвейера, он снабжен расположенной над, же. юбом подвижной 1птан- гой с закре 1.:|еппь ми г ней с шагом зубчатыми рейками. ;;; .pii;ip Ho установлоппыми
Q Н А С1:новании поиепек направления двп/кенря желоба отб(.Йнь;ка.И д.ля у:;с) при обратном желоба, кажд1)1Й из которых одной CT()iH)HOii ПОДНр Ж 1МСН O MiOCIiтель 1О основания с.м(лп 1ров;1ннымн па основании у каждсчч; отбойника посредсгвом оси зубчатым сектором, х.1аповым колесом и дву- плечим с двумя упорными собачками на одном его конце и упором на другом его конце, расноложенным с возможностью взаимодействия с другой стороной отбойника, при этом упорные собачки уста- 0 новлены с возможностью взаи.модействия с зубцами храпового колеса, а зубчатый сектор - с соответствую цей зубчатой рейкой. 2, Конвейер по п. 1, отличающийся тем, что подвижная штанга кинематически связана с желобо.м.
5
,22
fe. /
2Z
т.
Л5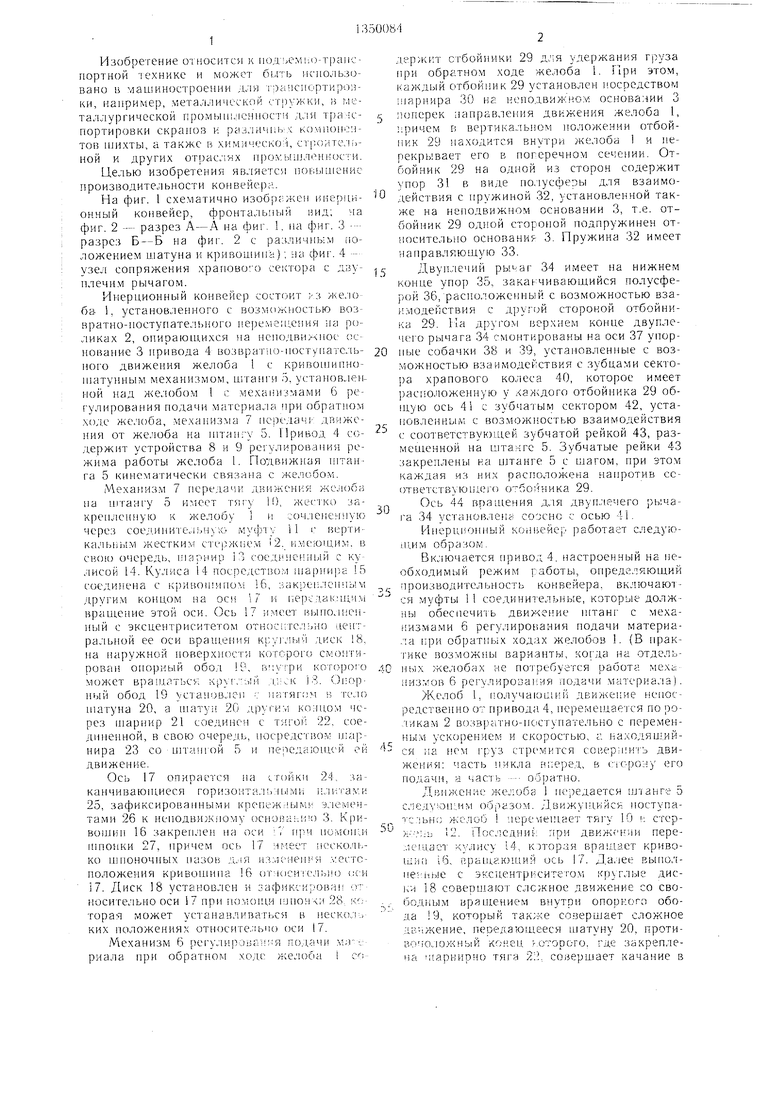
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| ОДНОШПИНДЕЛЬНЫЙ АВТОМАТИЧЕСКИЙ ТОКАРНО-РЕВОЛЬВЕРНЫЙ СТАНОК | 1949 |
|
SU91305A1 |
| Инерционный конвейер | 1987 |
|
SU1459982A1 |
| Механизм автоматического сдвига заправочных горизонтальных гребенок на коттон-машине | 1949 |
|
SU100148A3 |
| Устройство для вырубки заготовок из полосового и ленточного материала | 1979 |
|
SU871926A1 |
| Стол Кривовязюка к устройству для вырубки заготовок из плоского материала | 1983 |
|
SU1119760A1 |
| Щеточный механизм к запарочным тазам | 1941 |
|
SU63385A1 |
| Пресс для вырубки изделий излиСТОВОгО и лЕНТОчНОгО МАТЕРиАлА | 1978 |
|
SU795648A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Автоматический телефонный коммутатор | 1923 |
|
SU1850A1 |
Изобретение относится к подъемно- транспортной технике. Цель - повьипение производительности конвейера. На роликах, опирающихся на неподвижное основание 3 привода с кривошинно-а1атунным механизмом, установлен желоб (Ж) 1 с возможностью возвратно-поступательного перемещения. Над Ж 1 установлен механизм ре- гулиро ания хода Ж, кинематически связанный со пггангой 5. На штанге закреплены с jiaro.M зубчатые рейки 43, HjapHHpuo установленные на основании 3 поперек на- нравления движения Ж 1 отбойниками 29 для удержания при обратном ходе Ж 1. Каждый отбойник одной стороной подпружизв нен относительно ocHoiiaiuui 3. I Ькро.и-тг.ох: оси 41 у каждого ОТбоГшИК;; CMOiUiiрованы зубчатый сектор -12. в:1;1|1М(1Д1пкч вуюп1ий с рейкой 43, и храповое к .хчо 40 (д)осно оси 41 установлена ось 44 пр; 1исипя двуплечего рычага 34. На одном к..;ш ры чага имеются угюрные собачки 38 .; 39, изл имодействуюпхие с зубцами колеса 4П. H;i гом конце рычага имеется Tiop 35. имодейетвуюплпй с другой cTopoiioii oT6oii- ника 29. Движение Ж 1 передается inT.-iii ге 5. которая, перемещаясь вдол11 Ж , н.я- и.модействует с ре 1ками 43 и сек1(5ро 42. Поворото.м колеса 4(.i при взаимодейс . с собачками 38 и 39 ос)чиествляклч:я noBi.- рот (качание) рычага 34 и нерподячегк;-; поворот отбойшлка 29. Нрп прямом хо.че Ж 1 отбойник гфопускает дв11ж ни1Г1с пя Ж I м;;- териал. При обратном ходе Ж 1 oiotu i ник занимает 1 оперечпое юложенне, препятствуя движению .материала . (л1пх- ронное движение Ж 1 и принудитсмьных средств внутри Ж 1 для материала при об ратпом ходе Ж 1 позволяет увеличит, .тли- ну пути, пройденного материалом за о.;и1 цикл движения Ж 1. I з.п. ф-ль;, 4 ;; fXfea Ч ШЖ-1Д I сяА. / I . : -V ., Va t T3au, .rtac: - , иг 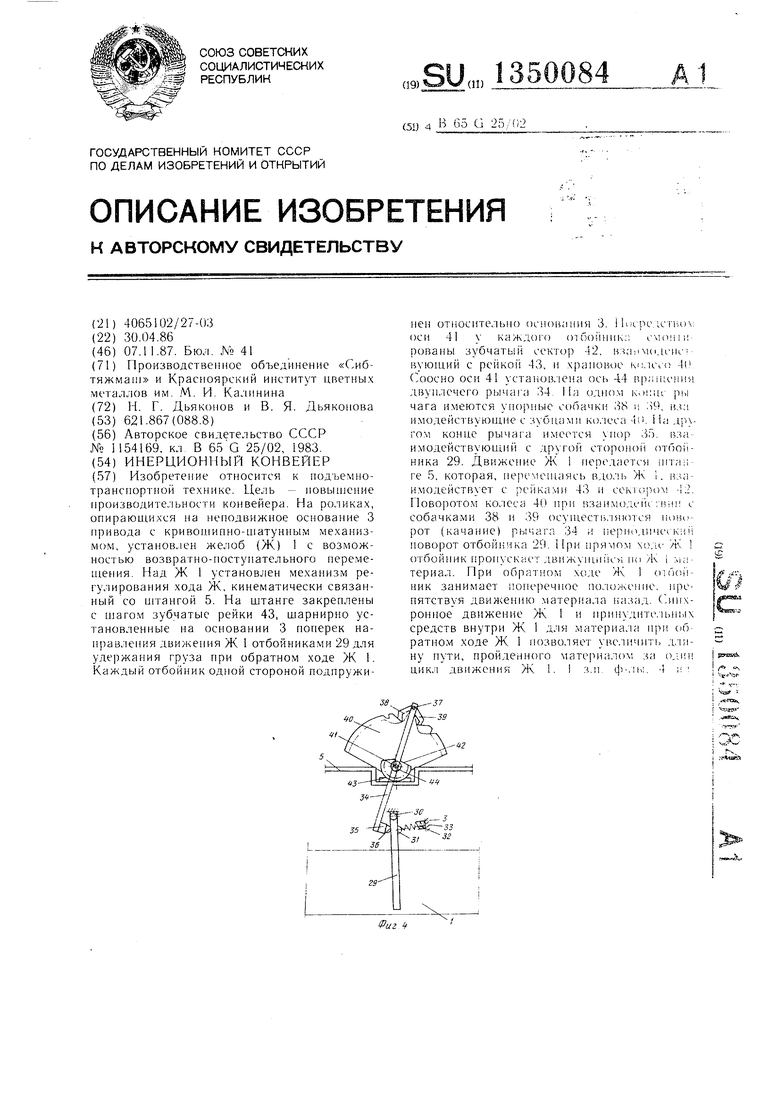
Q
| Инерционный конвейер | 1983 |
|
SU1154169A1 |
| кл, В 65 G 25/02, 1983. | |||
