Изобретение относится к подъемно-транспортной технике и может быть использовано в машиностроении для транспортировки, например, металлической стружки, для транспортировки скрепов и различных компонентов шихты, в химической, строительной и других отраслях промышленности.
Цель изобретения - расширение технологических возможностей конвейера.
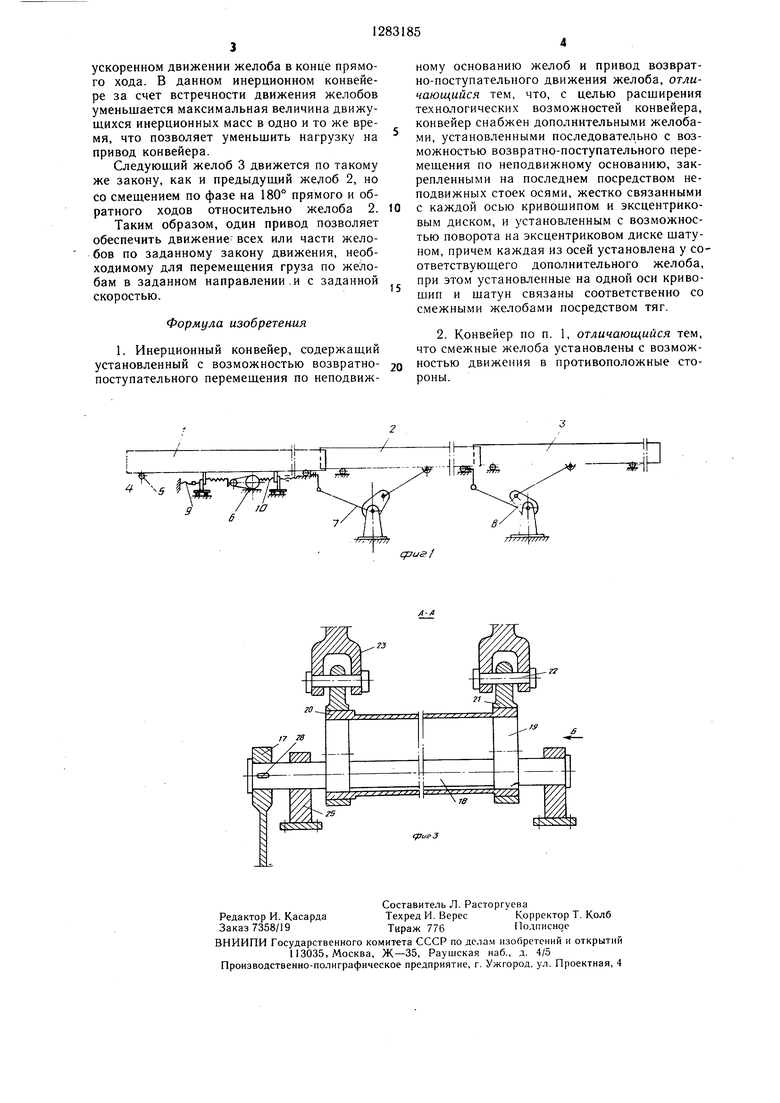
На фиг.1 изображен инерционный конвейер, фронтальный вид; на фиг.2 - частичный вид на фиг.1, в уве;1иченном размере; на фиг.З - разрез А-А на фиг.2.
Инерционный конвейер состоит из основного желоба 1 и дополнительных желобов 2 и 3, установленных последовательно на роликах 4 с возможностью возвратно-поступательного перемешения по неподвижному основанию 5, привода 6 возвратно-поступательного движения желобов и передаточных механизмов 7 и 8 передачи движения от одного желоба на другой. Привод 6 содержит устройства 9 и 10 регулирования режима работы желоба 1. Каждый из механизмов 7 и 8 передачи движения от одного желоба на другой имеет тягу 11, жестко закрепленную к желобу и сочлененную через соединительную муфту 12 с второй тягой - вертикальным жестким стержнем 13, имеющим, в свою очередь, через шарнир 14 соединение с третьей тягой - кулисой 15. Кулиса 15 посредством шарнира 16 соединена с кривошипом 17, закрепленным другим концом на оси 18 и передающим вращение этой оси. С осью 18 жестко связан выполненный с эксцентриситетом относительно центральной ее оси вращения эксцентриковый диск 19 круглой формы, на наружной поверхности которого расположен опорный обод 20 щатуна 21, внутри которого может вращаться эксцентриковый диск 19. Опорный обод 20 установлен с натягом в тело шатуна 21. А шатун 21 другим концом через шарнир 22 соединен с тягой 23, соединенной посредством шарнира 24 с желобом и передающей ему движение. Каждая ось 18 закреплена посредством стоек 25, заканчивающихся с горизонтальными плитами 26, зафиксированными крепежными элементами 27 на неподвижном основании 5 у соответствующего дополнительного желоба 2(3). Кривошип 17 жестко связан с осью 18 посредством шпонки 28.
Установленные на одной оси 18 кривошип 17 и шатун 21 связаны соответственно посредством указанных тяг со смежными желобами, которые установлены с возможностью движения в противоположные стороны.
Иперционный конвейер работает следующим образом.
Включается привод 6, настроенный на необходимый режим работы для обеспечения заданной производительности. Включаются муфты 12 соединения, которые обеспечивают
5
неразрывность перемещения тех механизмов для передачи движения, которые способствуют работе соответствующих желобов, т. е. включенные муфты обеспечивают непрерывность подачи материала с желоба, на который материал загружается до желоба, с которого он выгружается. Например, как показано на фиг.1 (привод у первого желоба), если материал загружается на первый желоб 1, а разгружается с третьего желоба 3,
то муфты 12 должны быть включены между первым и вторым желобами 1 и 2 и между вторым и третьим желобами 2 и 3. Если же материал подается на первый желоб 1 и с него выгружается влево, то указанные муфты должны быть отключены, чтобы желоба 2 и 3 не работали вхолостую. В том случае, когда привод 6 установлен у центрального желоба, то в зависимости от того, куда подается материал, влево или вправо, одни муфты могут быть включены, а другие отклюQ чены. Желоб 1, получающий движение непосредственно от привода 6, перемещается по роликам 4 возвратно-поступательно с переменным ускорением и скоростью, а находящийся на нем груз совершает движения: часть цикла вперед, в сторону его подачи, а часть - обратно. Неравномерность движения желоба за один цикл за счет переменного ускорения и скорости его движения обеспечивает продвижение груза на нем в заданном направлении.
Движение соседнего с желобом 1 желоба 2 осуществляется за счет движения желоба 1. Это происходит следующим образом. Движущийся поступательно желоб 1 перемещает тягу 11 и стержень 13. Стержень 13 при движении перемещает кулису 15, которая вращает кривошип 17, вращающий ось 18. Далее выполненные с эксцентрисистетом диски 19 соверщают сложное движение со свободным вращением внутри опорного обода 20, который также совершает сложное движение, передающееся шатуну 21, проти0 воположный конец которого, где шарнирно закреплена тяга 23, совершает качание в вертикальной плоскости на определенный угол относительно вертикальной оси, определяющий величину хода желоба.
Необходимые переменные ускорения и скорости желоба определяются положением щатуна 2 относительно вертикальной оси, а также величиной эксцентриситета между осью 18 и эксцентриковым диском 19, расположением этого диска относительно вертикальной оси, местоположением кривошипа 17 и кулисы 15. Все это позволяет обеспечить возвратно-поступательное движение желоба 2 с подачей транспортируемого груза в заданном направлении. При этом два соседних желоба движутся каж5 дый ход синхронно навстречу друг другу в противофазах (фиг.2, одно из положений). Это очень важно для инерционных конвейеров, принцип работы которых основан на
0
5
0
ускоренном движении желоба в конце прямого хода. В данном инерционном конвейере за счет встречности движения желобов уменьшается максимальная величина движущихся инерционных масс в одно и то же время, что позволяет уменьшить нагрузку на привод конвейера.
Следуюш.ий желоб 3 движется по такому же закону, как и предыдущий желоб 2, но со смещением по фазе на 180° прямого и обратного ходов относительно желоба 2.
Таким образом, один привод позволяет обеспечить движение всех или части желобов по заданному закону движения, необходимому для перемещения груза по желобам в заданном направлении.и с заданной скоростью.
Формула изобретения
1. Инерционный конвейер, содержащий установленный с возможностью возвратно- поступательного перемещения по неподвиж
ному основанию желоб и привод возвратно-поступательного движения желоба, отличающийся тем, что, с целью расширения технологических возможностей конвейера, конвейер снабжен дополнительными желобами, установленными последовательно с возможностью возвратно-поступательного перемещения по неподвижному основанию, закрепленными на последнем посредством неподвижных стоек осями, жестко связанными с каждой осью кривошипом и эксцентриковым диском, и установленным с возможностью поворота на эксцентриковом диске шатуном, причем каждая из осей установлена у соответствующего дополнительного желоба, при этом установленные на одной оси кривошип и щатун связаны соответственно со смежными желобами посредством тяг.
2. Конвейер по п. 1, отличающийся тем, что смежные желоба установлены с возможностью движения в противоположные стороны.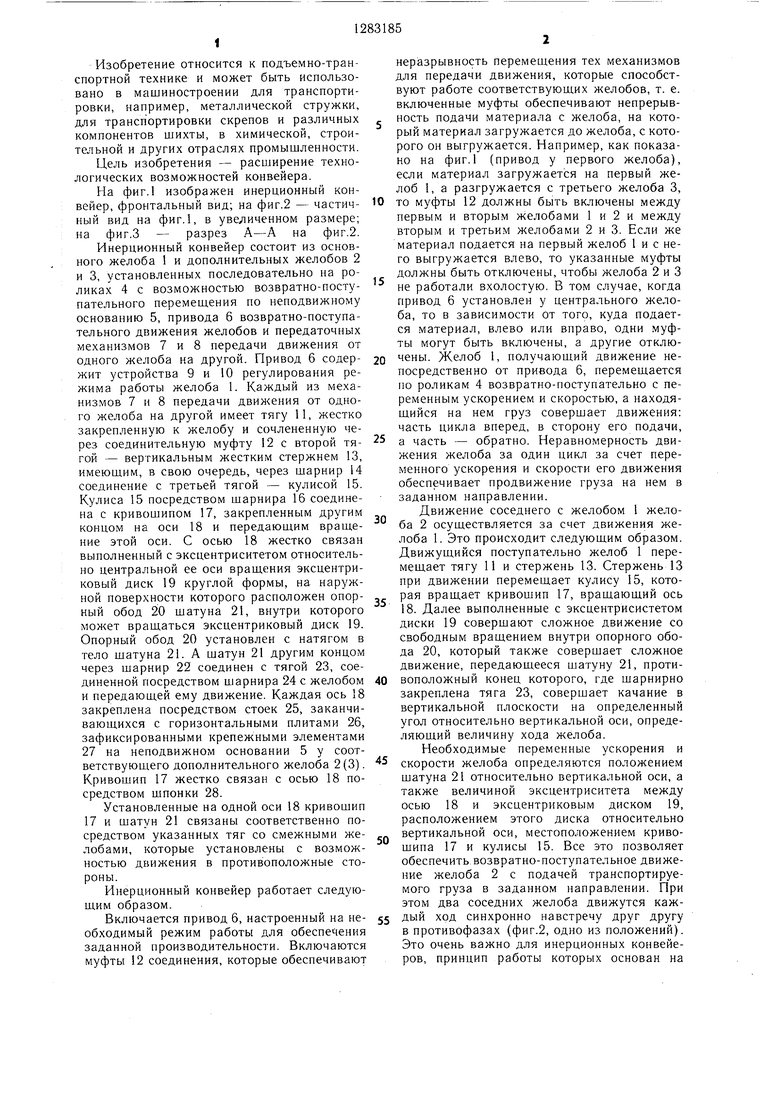
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1987 |
|
SU1459982A1 |
| Инерционный конвейер | 1986 |
|
SU1350084A1 |
| Инерционный конвейер | 1988 |
|
SU1541154A1 |
| Инерционный конвейер | 1989 |
|
SU1634607A1 |
| Инерционный конвейер | 1983 |
|
SU1154169A1 |
| ЭКСЦЕНТРИКОВЫЙ ШАТУН | 1999 |
|
RU2178106C2 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |
| Инерционный конвейер | 1981 |
|
SU994364A1 |
| МНОГОШПИНДЕЛЬНЫЙ СТАНОК ДЛЯ ШЛИФОВКИ | 1968 |
|
SU231335A1 |
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
Изобретение относится к подъемно- транспортной технике и позволяет расширить технологические возможности конвейера. Он включает последовательно установленные с возможностью возвратно-поступательного движения по неподвижному основанию 5 основной и дополнительные 2 и 3 желоба (Ж). Приче.м Ж 2 и 3 установлены с возмож- нотью движения в противопложные стороны и закреплены на основании 5 посредством неподвижных стоек 25 осями 18. Каждая из осей 18 установлена у соответствуюи1его Ж 2 и 3 и жестко связана с кривошипом 17 и эксцентриковым диском 19, на котором установлен с возможностью поворота шатун 21. Установленные на одной оси 18 кривошип 17 п шатун 21 связаны посредством тяг 11, 13, 15 и 23 со смежными Ж 2 и 3. Приводом основной Ж приводится в возвратно-поступательное движение, и груз, находяш,ийся на нем, продвигается в заданном направлении. Движение Ж 2 осуш.ествляется за счет движения основного Ж. Он перемещает тяги 11,13 и 15, которые вращают кривошип 17, вращающий ось 18. Эксцентриковый диск 19 совершает сложное движение, передающееся шатуну 21 и через тягу 23 Ж 2. При этом Ж 2 и 3 движутся навстречу друг другу в противофазах. Один привод обеспечивает движение всех или части Ж по заданному закону движения. 1 з.п.ф-лы. 3 ил. а С tc 00 со 00 О1 21
CpuffJ
22
Составитель Л. Расторгуева
Редактор И. КасардаТехред И. Верес Корректор Т. Колб
Заказ 7358/19Тираж 776Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Инерционный конвейер | 1982 |
|
SU1065311A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Инерционный конвейер | 1983 |
|
SU1154169A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
