Изобретение относится к подъемно- транспортной технике и может быть исполь- зовано в машиностроении для транспортировки, например, металлической стружки, в металлургической промышленности - для транспортировки скрапов и различных элементов шихты, в химической, строительной и других отраслях промышленности.
Известен инерционный конвейер, в котором привод выполнен на основе регулируемого по длине кривошипа, взаимодействующего посредством ползуна с двуплечим рычагом, другой конец которого шарнирно через тягу связан с желобом.
Этот конвейер позволяет повысить производительность его и надежность в работе,
однако его ограничения связаны с однозначностью по величине хода желоба.
Целью настоящего изобретения является расширение технологических возможностей путем изменения хода желоба. Эта цель достигается тем, что шарнирно соединенное с тягой плечо двуплечего рычага выполнено с продольным пазом, в котором установлен с возможностью перемещения и фиксации шарнир соединения плечастягой.
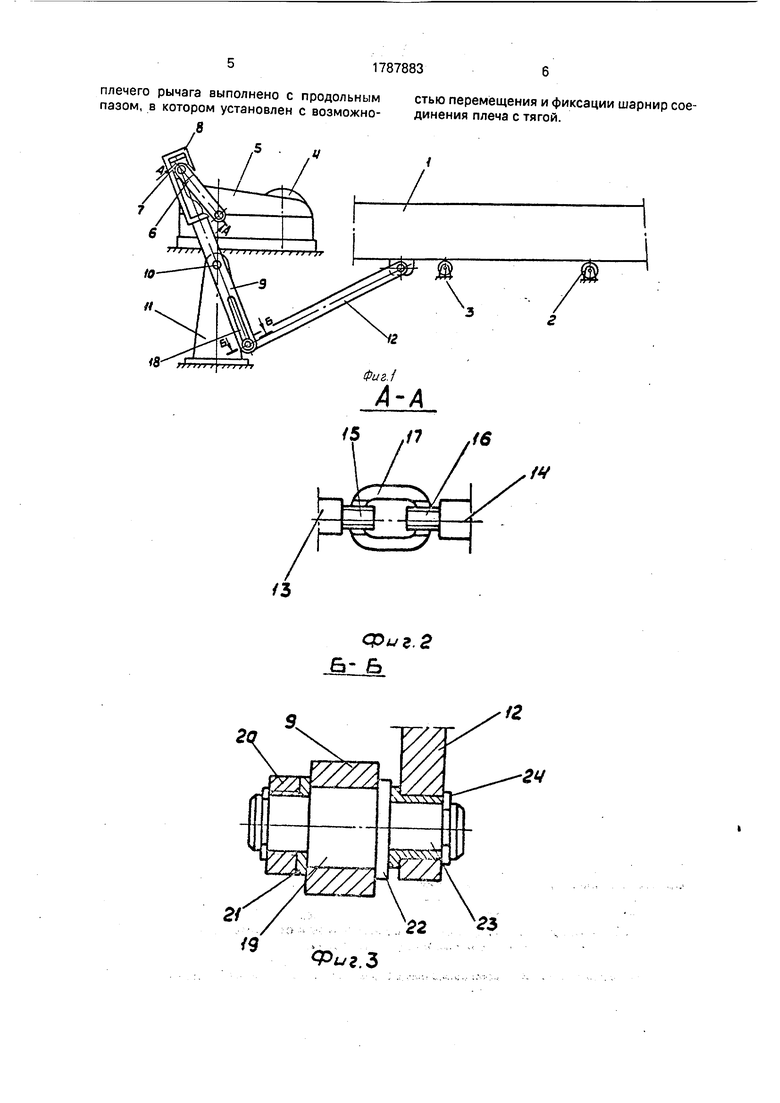
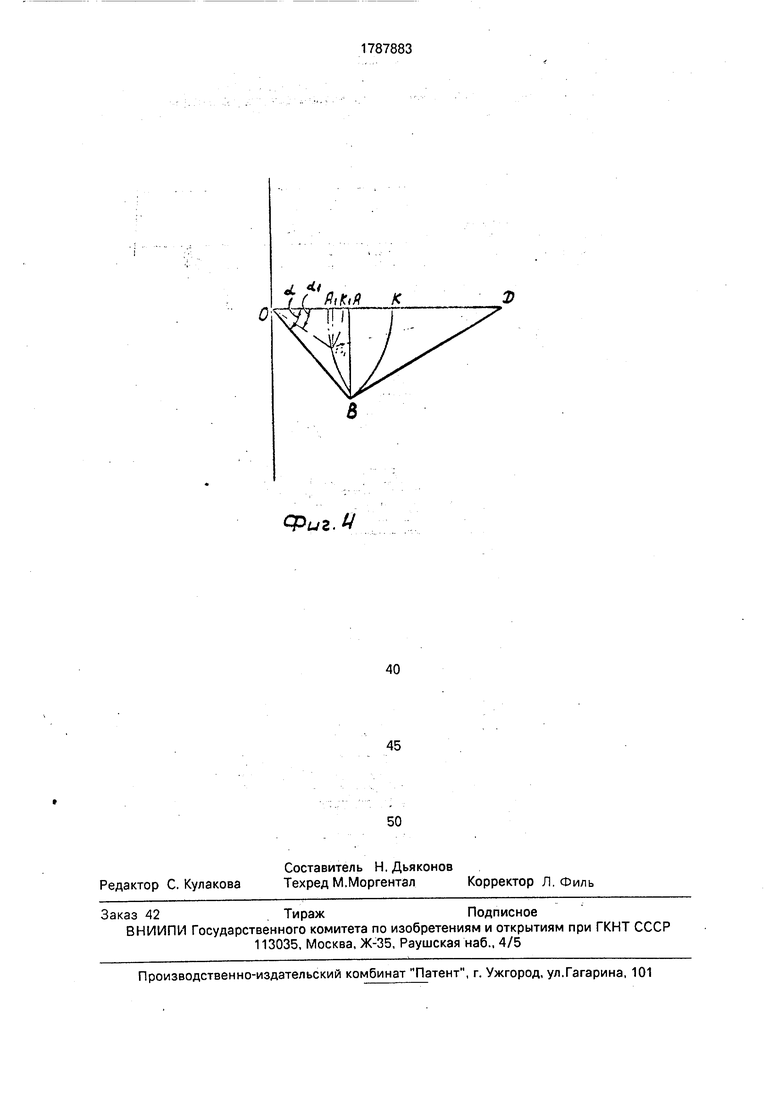
На фиг.1 схематично изображен общий вид конвейера; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - геометрическая схема элементов привода.
Инерционный конвейер содержит желоб 1 с роликами 2, установленный на основании 3 с возможностью возвратно-поXI00 V4 00 00 СО
ступательного перемещения от привода. Привод состоит из электродвигателя 4, передающего вращейие редуктору 5, на выходной конец которого, совершающий обычное вращение, насажен кривошип 6, другой конец которого шарнирно соединен с ползуном 7, имеющим возможность перемещения по направляющим 8 рычага 9. Рычаг 9 имеет опорную, ось, 10, установленную в стойках.11, относительно которой он может вращаться. Другой конец рычага 9 соединен шарнирно с тягой 12, закрепленной шарнирно к желобу 1.
Кривошип 6 выполнен регулируемым по длине и содержит хвостовики 13 и 14 с концами 15 и 16, имеющими левую и правую резьбу, с которыми сопрягается скоба 17, при вращении которой в ту или иную сторону общая длина кривошипа 6 меняется.
Другое плечо рычага 9 имеет продольный паз 18, внутри которой установлен палец 19, имеющий возможность свободного перемещения сопрягаемыми поверхностями вдоль этого паза. Фиксированное положение пальца 19 в продольном пазе 18 осуществляется посредством гайки 20 через шайбу 21 и буртик 22 пальца 19. Тяга 12 установлена концом на хвостовике 23 пальца 19 с возможностью вращения на этом хвостовике, на котором установлена опорная шайба 24.
Конвейер работает следующим образом,
Длина кривошипа настраивается на необходимую длину, а палец 19 устанавливается в необходимом месте вдоль паза 18, определяя длину плеча рычага 9. Включается привод, выходной вал редуктора 5 вращает кривошип 6, передающий движение шатуну 9, который вращается относительно оси 10. Рычаг 9 передает движение через тягу 12 желобу 1, который движется возвратно-поступательно с разным временем прямого и обратного хода, что опреде- ляет разные скорости перемещения желоба.
Представленная геометрическая схема на фиг.1 позволяет судить об изменении хода желоба 1 от местоположения конца тяги 12 в продольном пазе 18 рычага 9. На этой схеме ВД - длина тяги, т.О - ось вращения двуплечего рычага 9. 0В ОК - длина плеча рычага 9, or- угол между прямой, определяющей местоположение рычага 9, и линией перемещения желоба 1. Из схемы видно, что величина перемещения желоба определяется величиной перемещения отрезка АК.
AK OK-OA d; OB OK r.
ПД Из А ОКБ cosa -Qry ОА rcoscr .
Отсюда,t
d r- rcosa r(1 -cosa).(1) Из выражения (1) видно, величина хода желоба 1 зависит прямо пропорционально от величины плеча г и угла a(cosa изменяется от 1 до 0 при изменении угла от 0 до
90°). Этому условию изменения хода желоба удовлетворяет наличие продольного паза в плече рычага 9.
Конвейер такой конструкции позволяет оптимизировать процесс транспортирования различных сыпучих материалов с точки зрения производительности за счет регулирования двух параметров его работы: разности скоростей прямого и обратного ходов желоба, определяющих силовые инерционные факторы движущегося материала и величины хода желоба, определяющей разовое перемещение транспортируемого материала. Это разовое перемещение для различных материалов различно и при одной и той же величине хода зависит от коэффициента трения между транспортируемым материалом и желобом и инерционных сил, действующих на транспортируемый материал. Поэтому для определения наибольшей производительности для любого сыпучего материала необходима возможность изменения двух параметров: величины хода желоба и разности скоростей прямого и обратного ходов желоба. Привод
такой конструкции инерционного конвейера позволяет регулировать эти параметры, определять оптимальное сочетание этих параметров для каждого материала с целью получения наибольшей производительности.
Формула изобретения Инерционный конвейер, содержащий установленный с возможностью возвратнопоступательного перемещения по основанию грузонесущий желоб, привод желоба с регулируемым по длине кривошипом, установленный с возможностью поворота на основании двуплечий рычаг с продольным
замкнутым пазом на одном его конце, шарнирно закрепленный на свободном конце кривошипа и расположенный с возможностью возвратно-поступательного перемещения s пазу двуплечего рычага ползун и
тяга, шарнирно связанная с желобом и другим кбнцом двуплечего рычага, о т л и ч а ю-, щ и и с я тем, что, с целью расширения технологических возможностей конвейера путем обеспечения изменения хода желоба,
шарнирно соединенное с тягой плечо двуплечего рычага выполнено с продольным стью перемещения и фиксации шарнир сое- пазом, в котором установлен с возможно- динения плеча с тягой.

| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1989 |
|
SU1645215A1 |
| Инерционный конвейер | 1989 |
|
SU1634607A1 |
| Инерционный конвейер | 1988 |
|
SU1541154A1 |
| Инерционный конвейер | 1984 |
|
SU1207920A1 |
| Инерционный конвейер | 1987 |
|
SU1459982A1 |
| Инерционный конвейер | 1986 |
|
SU1350084A1 |
| Шаговый конвейер | 1987 |
|
SU1535795A1 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Инерционный конвейер | 1986 |
|
SU1351848A1 |
| Инерционный конвейер | 1985 |
|
SU1283185A1 |
Использование: изобретение относится к подъемно-транспортной технике и может быть использовано в машиностроении для транспортировки, например, металлической стружки, в металлургической промышленности - для транспортировки скрапов и различных элементов шихты, в химической, строительной и других отраслях промышленности. Цель изобретения - расширение технологических возможностей конвейера путем изменения хода желоба. Сущность изобретения: инерционный конвейер содержит установленный с возможностью возвратно-поступательного перемещения по основанию грузонесущий желоб и привод желоба на основе регулируемого по длине кривошипа, взаимодействующего через ползун со свободным концом двуплечего рычага, другой конец которого шарнирно связан с желобом посредством тяги. При этом шарнирно соединенное с тягой плечо двуплечего рычага выполнено с продольным пазом, в котором установлен с возможностью перемещения и фиксации шарнир соединения плеча с тягой. 4 ил. ел с
Фи г. 2
а-Б
Фиг. #
| Инерционный конвейер | 1989 |
|
SU1645215A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
