Изобретение относится к строительству и может быть использовано для автоматизации технологического процесса кладки кирпичных стен при возведении зданий и сооружений с помощью специальных машин или роботизированных комплексов с лазерными системами ориентирования, а также и в других машинах и механизмах, местоположение которых в пространстве является объектом управления.
Целью изобретения является повы- .шение точности контроля.
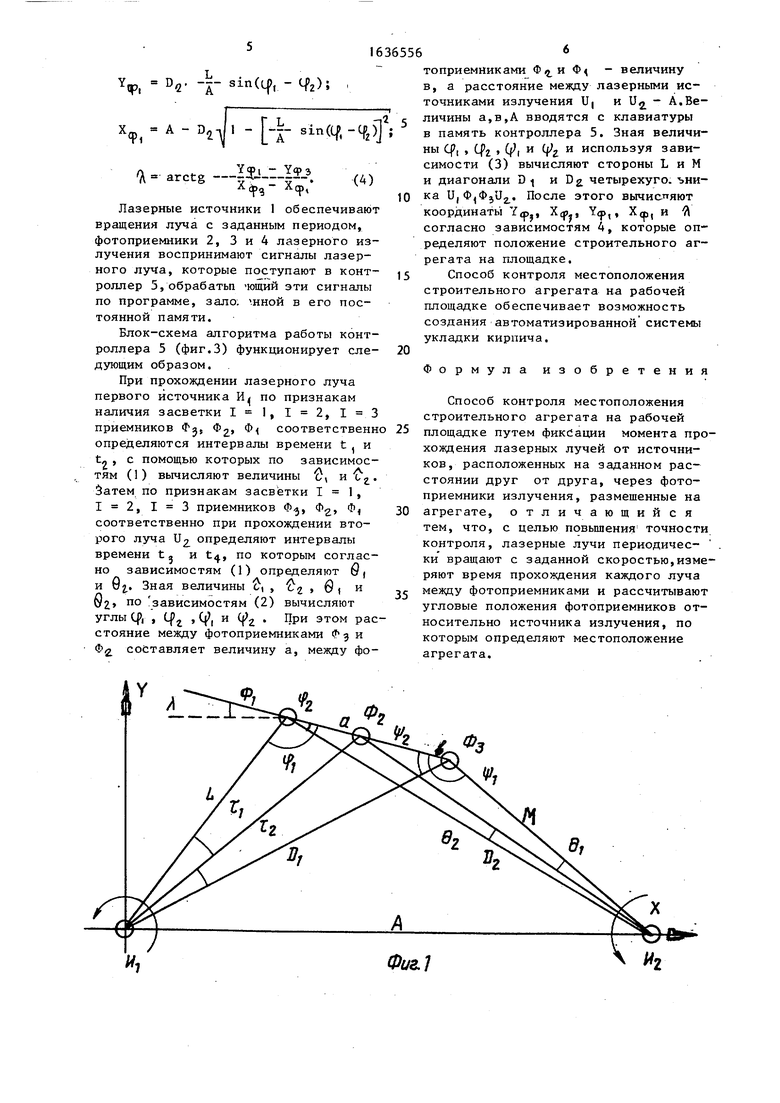
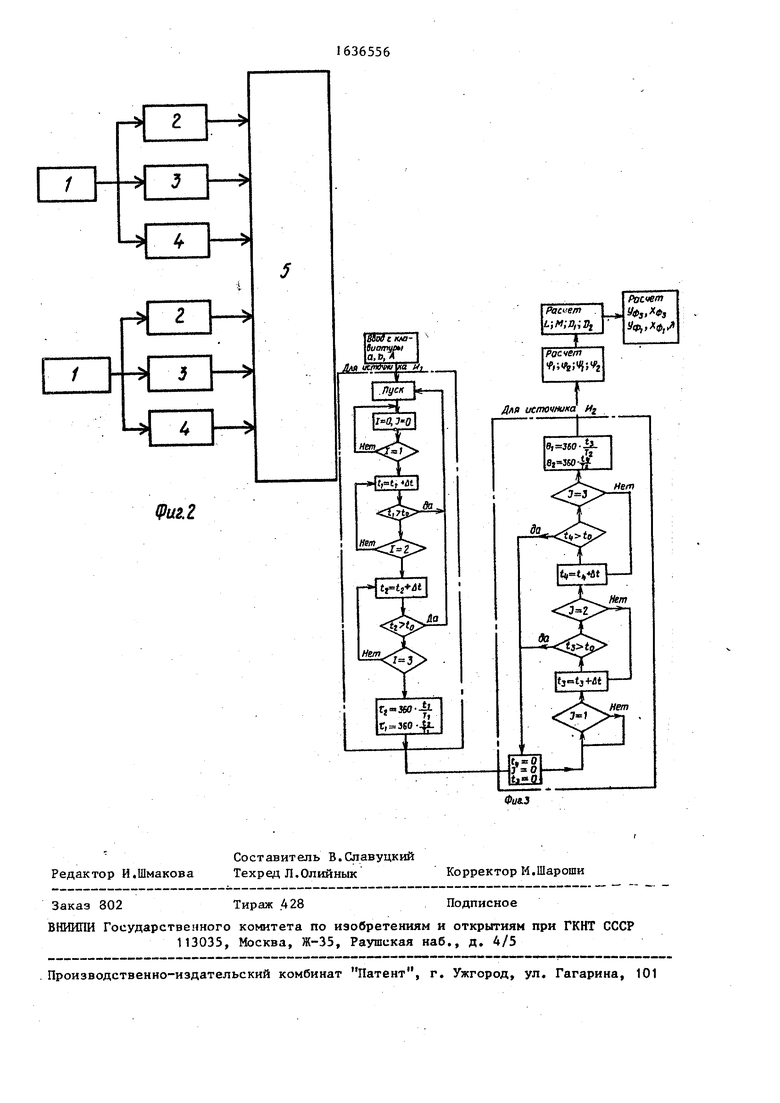
На фиг.1 представлено местоположение строительного а грегата на рабочей площадке; на фиг.2 - один из вариантов блок-схемы устройства для реализации способа; на фиг.З - блок- схема программы, реализующей алгоритм функционирования контроллера в устройстве .
з оо
о ел ел
35
Сущность способа заключается в следующем.
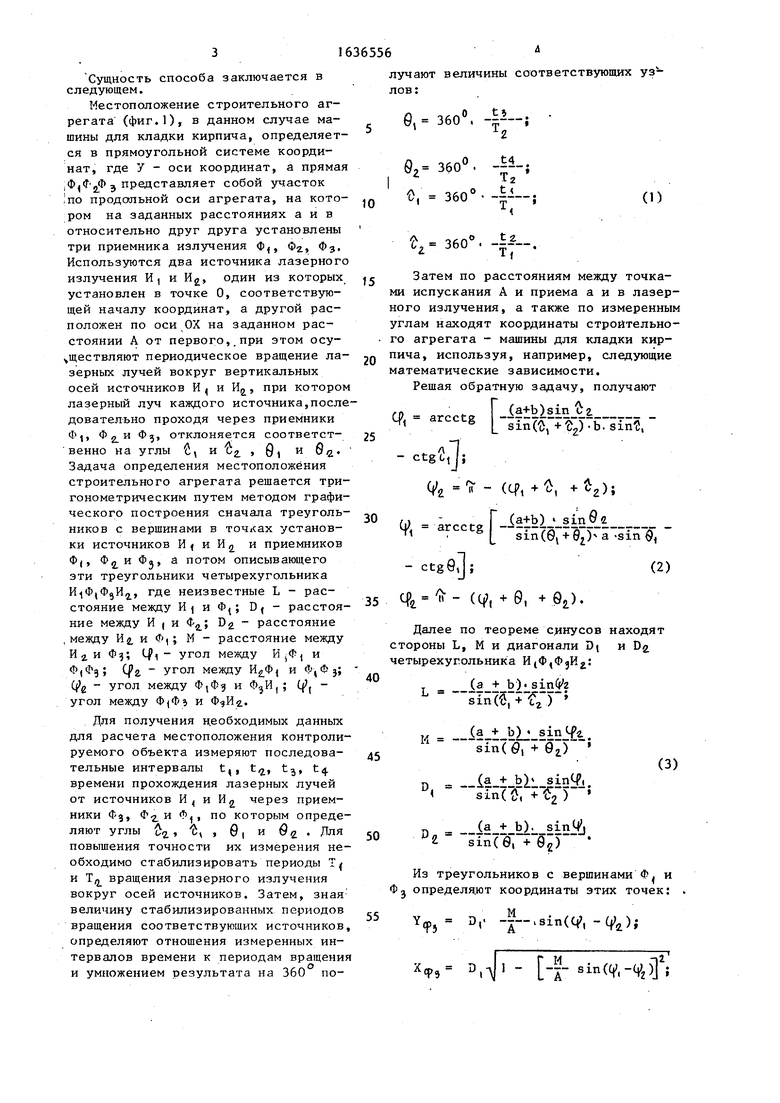
Местоположение строительного агрегата (фиг.1), в данном случае машины для кладки кирпича, определяется в прямоугольной системе координат, где У - оси координат, а прямая э представляет собой участок по продольной оси агрегата, на котором на заданных расстояниях айв относительно друг друга установлены три приемника излучения фг, ф3. Используются два источника лазерного излучения И, и И2, один из которых установлен в точке 0, соответствующей началу координат, а другой расположен по оси ОХ на заданном расстоянии А от первого,.при этом осуществляют периодическое вращение лазерных лучей вокруг вертикальных осей источников И и И, при котором лазерный луч каждого источника,последовательно проходя через приемники «I1, Ф g и Ф;}, отклоняется соответственно на углы Ј, и 2. 01 и ®2« Задача определения местоположения строительного агрегата решается тригонометрическим путем методом графического построения сначала треугольников с вершинами в точках установкиФ
источников И и И и приемников
(
Ф2.И Фэ,
а потом описывающего
эти треугольники четырехугольника И1Ф4Ф3Иг, где неизвестные L - расстояние между И) и Df - расстояние между И | и Вг - расстояние между Hj. и f( ; М - расстояние между И г и M l угол между И (Ф, и Ф(Фз; . - угол между и Л,Фз; - угол между Ф(Фэ и ,; (, - угол между Ф)Ф5 и .
Для получения необходимых данных для расчета местоположения контролируемого объекта измеряют последовательные интервалы t,, t, t, . времени прохождения лазерных лучей от источников И, и И,
ники Фз, Ф и Л
г
ьч 1
ij, через прием- , по которым определяют углы Уг, , , 0, и б 2 Для повышения точности их измерения необходимо стабилизировать периоды Т{ и Т вращения лазерного излучения вокруг осей источников. Затем, зная величину стабилизированных периодов вращения соответствующих источников, определяют отношения измеренных интервалов времени к периодам вращения и умножением результата на 360 получают величины соответствующих узлов:
10
(П
Затем по расстояниям между точками испускания А и приема айв лазерного излучения, а также по измеренным углам находят координаты строительного агрегата - машины для кладки кирпича, используя, например, следующие математические зависимости.
Решая обратную задачу, получают
Ср, arcctg
;,;
.2:
In ( ьГэГп-г,
- Ctgl
- ч,
+ Ј.
+ fc«
);
( arcctg
;в,;
f i§:tk §iuiL
L + 9гЬ a -sin $i
- ctg
(2)
35
«fi-ft- ((,
+ 0, + 0,).
Далее по теореме синусов находят стороны L, М и диагонали DI и Dg четырехугольника ,:
(а + b). si5(S +T2T;
М
D.
(а + b)j . sin( 0,
Јa + b sintfi slnCl (3)
)
50
DЈ
(a + b. sin(6 -Г0Л
Из треугольников с вершинами Ф. и Ф определяют координаты этих точек:
М YcPj D| -д-isin i V4)
X
Фэ
D
,-Jl - -|- sin((-)2;
Ъ
Ф
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОТОЭЛЕМЕНТ ПРИЁМНИКА-ПРЕОБРАЗОВАТЕЛЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2015 |
|
RU2593821C1 |
| Способ контроля местоположения платформы строительного агрегата на рабочей площадке | 1989 |
|
SU1707123A1 |
| Система управления курсом движения землеройных машин | 1989 |
|
SU1647092A1 |
| Оптическая система формирования и наведения лазерного пучка | 2019 |
|
RU2715083C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2521972C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2014 |
|
RU2548366C1 |
| УСТРОЙСТВО ДЛЯ РУЧНОЙ КЛАДКИ КИРПИЧА | 2008 |
|
RU2382858C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2015 |
|
RU2615050C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| Способ позиционирования подвижного объекта | 2017 |
|
RU2656361C1 |
Изобретение относится к строительству и может быть использовано для автоматизации технологического процесса кладки кирпичных стен при возведении зданий и сооружений с помощью специальных или роботизированных комплексов с лазерными системами ориентирования, а также и в других машинах и механизмах, местоположение которых в пространстве является объектом управления. Позволяет повысить точность контроля. Для достижения этой цели фиксируют моменты прохождения лазерных лучей от источников до приемников, периодически вращают лазерные лучи с заданной скоростью, измеряют время прохождения каждого луча и рассчитывают угловые положения фотоприемников, которые определяют местоположение агрегата, 3 ил. (Л
Редактор И.Шмакова
Составитель В.Славуцкий
Техред Л.Олийнык Корректор М.Шароши
Заказ 302
Тираж 428
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Электронные и микропроцессорные системы автоматизации строительных, дорожных машин и оборудования: Обзорная информация | |||
| - М., ЦНИИТЭ- строймаш, 1988, вып | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| с | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство для управления манипулятором | 1982 |
|
SU1084726A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
