Изобретение относится к строительству, а именно к автоматизации технологических процессов,,
Цель изобретения - расширение функциональных возможностей и повышение точности контроля„
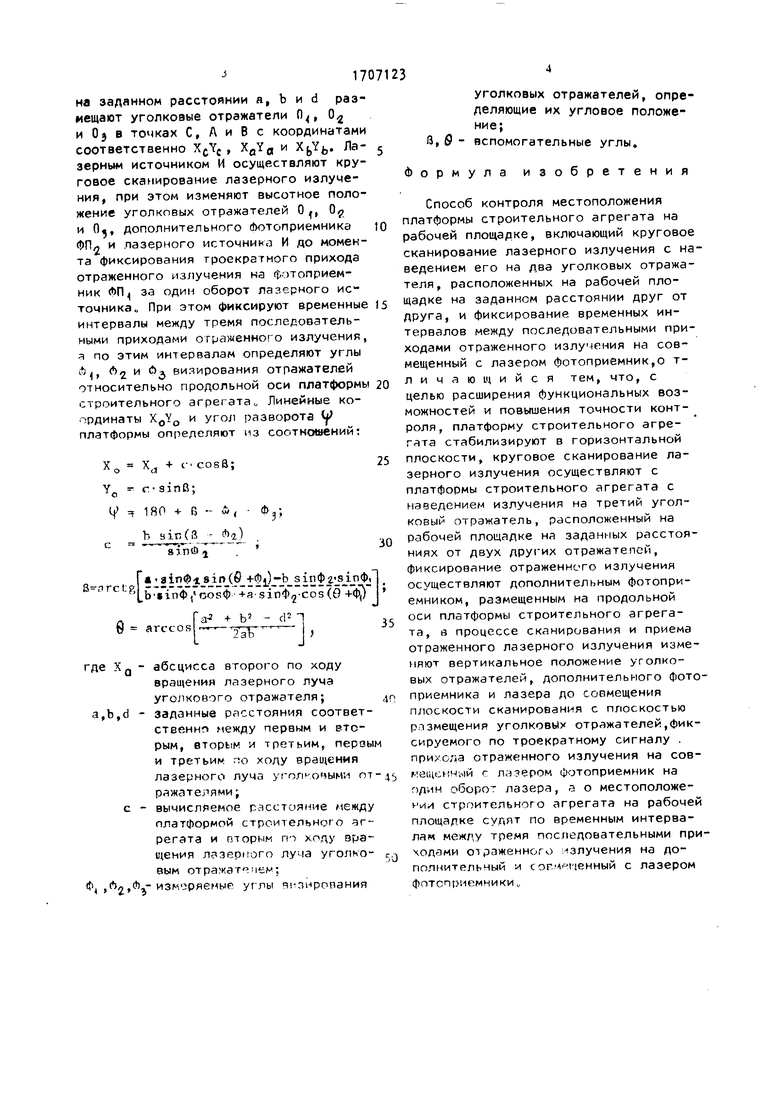
На чертеже показана схема осуществления способа в прямоугольной системе координат„
Способ осуществляют следующим образом.
На стабилизированной в горизонтальном положении платформе строительного агрегата устанавливают лазерный источник И, совмещенный с фотоприемником ФП{ и дополнительный фотоприемник ОП, размещенный на продольной оси платформы„ На рабочей площадке
J 1
на заданном расстоянии a, b и d размещают уголковые отражатели 0,0 и 0} в точках С, Л и В с координатам соответственно XCYC , X0Ya и ,. Ла зерным источником И осуществляют круговое сканирование лазерного излучения, при этом изменяют высотное положение уголковых отражателей 0 f, Qy и (Ц, дополнительного фотоприемника ФПл и лазерного источника И до момента фиксирования троекратного прихода отраженного излучения на Фотоприем- ник АП за один оборот лазерного источника. При этом фиксируют временны интервалы между тремя последовательными приходами отраженного излучения а по этим интервалам определяют углы 1 и лэ визирования отражателей относительно продольной оси платформ строительного агрегата„ Линейные координаты XOY0 и угол разворота у платформы определяют из соотношений:
Ха + c-.cosS; -г.- ainB; 180 + В - А,
Ъ в ir, (8 - Ла) азпйд
V
Г I 11 ЛР( ± О.гЧ.s п Ф 2 s п Ф 1.
( +a-sir 2-cos(9+ф)
fl Га + Ь3 - d У arccos L
2аЪ
де XQ - абсцисса второго по ходу вращения лазерного луча уголкового отражателя; дп a,b,d - заданные расстояния соответственна между первым и вторым, BTopfciM и третьим, перзым и третьим по ходу вращения лазерного луча уголкочыми от-д ражателями;
с - вычисляемое расстояние между платформой строительного агрегата и вторым п- ходу вращения лазерного луча уголко- Сл вым от ража т .чем;
4 , УГЛЫ визирования
уголковых отражателей, определяющие их угловое положение;и,S - вспомогательные углы.
Формула изобретения
Способ контроля местоположения платформы строительного агрегата на рабочей площадке, включающий круговое сканирование лазерного излучения с наведением его на два уголковых отражателя, расположенных на рабочей площадке на заданном расстоянии друг от друга, и фиксирование временных интервалов между последовательными приходами отраженного излучения на совмещенный с лазером фотоприемник,о т- личающийся тем, что, с целью расширения функциональных возможностей и повышения точности контроля, платформу строительного агрегата стабилизируют в горизонтальной плоскости, круговое сканирование лазерного излучения осуществляют с платформы строительного агрегата с наведением излучения на третий уголковый отражатель, расположенный на рабочей площадке на заданных расстояниях от двух других отражателей, фиксирование отраженного излучения осуществляют дополнительным фотоприемником, размещенным на продольной оси платформы строительного агрегата, s процессе сканирования и приема отраженного лазерного излучения изменяют вертикальное положение уголковых отражателей, дополнительного фотоприемника и лазера до совмещения плоскости сканирования с плоскостью размещения уголковых отражателей,фиксируемого по троекратному сигналу . прихода отраженного излучения на совмещенный с лазером фотоприемник на один оборот лазера, а о местоположении строительного агрегата на рабочей площадке судят по временным интервалам между тремя последовательными приходами отраженного излучения на дополнительный и с отмененный с лазером фотоприемники„
)
B(X§; yg)
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ | 2020 |
|
RU2745341C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НА РАБОЧЕЙ ПЛОЩАДКЕ | 1991 |
|
RU2014417C1 |
| Лазерный космический гравитационный градиентометр | 2021 |
|
RU2754098C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| Устройство для измерения абсолютного значения ускорения силы тяжести | 1985 |
|
SU1299319A1 |
| ЛАЗЕРНЫЙ МАЯК | 2002 |
|
RU2248299C2 |
| СПОСОБ РЕГИСТРАЦИИ СТАТИСТИЧЕСКОГО РАСПРЕДЕЛЕНИЯ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ОТ НИЗКОЛЕТЯЩЕЙ РАКЕТЫ БЛИКАМИ МОРСКОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2451301C1 |

Изобретение относится к строительству, а именно к автоматизации технологических процессов. Цель изобретения - расширение функциональных возможностей и повышение точности контроля о Способ осуществляют следующим образом. Платформу строительного агрегата стабилизируют в горизонтальном положении и с нее осуществляют круговое сканирование лазерного излучения на три уголковых отражателя 0,, 02 и О-}, размещенных на рабочей площадке на заданных расстояниях a, h и d друг от друга, фиксирование отраженного излучения осуществляют фот опписмником (, совмещенным с я. И и дспопкительным фотоприемником Пг, размещенным на продольной оси платформы строительного агрегата, В процессе сканирования и приема лазерного излучения изменяют положение толковых отроисте- лей, фотоприемнич ое и лаэер-ч до троекратного сигнала нгихода отраженного излучения за один о оорот лозера, а о местонахождении CTPOVтельного агрегата судят по углам Л(, А,, и ( $, характеризуемым временными интервалами между тремя последовательными приходами отраженного излучения на фотоприемники. 1 ил0
| Способ контроля местоположения строительного агрегата на рабочей площадке | 1988 |
|
SU1636556A1 |
| Барышена М„Н„, Дементьев В0Е | |||
| Использование сканирующего лазерного излучателя при нивелировании | |||
| - Автомобильные дороги, 1976, К 10, ( СПОСОБ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПЛАТФОРМЫ СТРОИТЕЛЬНОГО АГРЕГАТА НА РАБОЧЕЙ ПЛОЩАЛКЕ | |||
