1
Изобретение относится к горнодобываклдей промышленности и может быть, использовано на подъемных машинах, именицих быстродействующий тормозной привод.5
Известно устройство для управления предохранительным торможением подъемной установки, содержащее датчик положения сосудов в стволе, датчик и задатчик замедлений, соединен- Ю ные со входами блока сравнения, и блок программ торможения l .
Недостаком этого устройства явля- ется то, что режим торможения сопровождается значительными динамичес- 1$ кими напряжениями, являющимися следствием колебательного процесса, объясняемого наличием упругих механических связей и, прежде всего, упругими свойствами подъемных канатов. 20
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления предохранительным торможением подъемной установки, содер- 25 жащее датчики сигналов оптимального и экстренного торможения и положения сосудов в стволе, подключенные ко входам блока программ торможения, i Соединенный с датчиком положения со- 30
судов в стволе задатчик и датчик замедления, подключенные ко входам блока сравнения, выходом связанного с приводом тормоза подъемной машины, датчик скорости и элемент контроля отклонения действительного згьмедления от заданного, соединенный входом с датчиком замедления 2.
Недостатком этого устройства является также наличие значительных динамических напряжений в процессе предохранительного торможения, что уменьшает надежность подъемной установки .
Цель изобретения - повышение надежности путем уменьшения динамических напряжений в элементах подъемной установки.
Цель достигается тем, что устройство снабжено блоком формирования сигнала уменьшения замедления, блоком Нелинейности, подключенным входом к датчику замедления, и дополнительным блоком сравнения, к одному из входов которого подключен выход блока нелинейности, к другому - датчик скорости, а к выходу - блок формирования сигнсша уменьшения замед1ления, соединенный дополнительно входом с задатчиком замедления и выходом элемента контроля отклонения действительного замедления от заданного, а выходом - со входом блока (программы тормо г,ения.
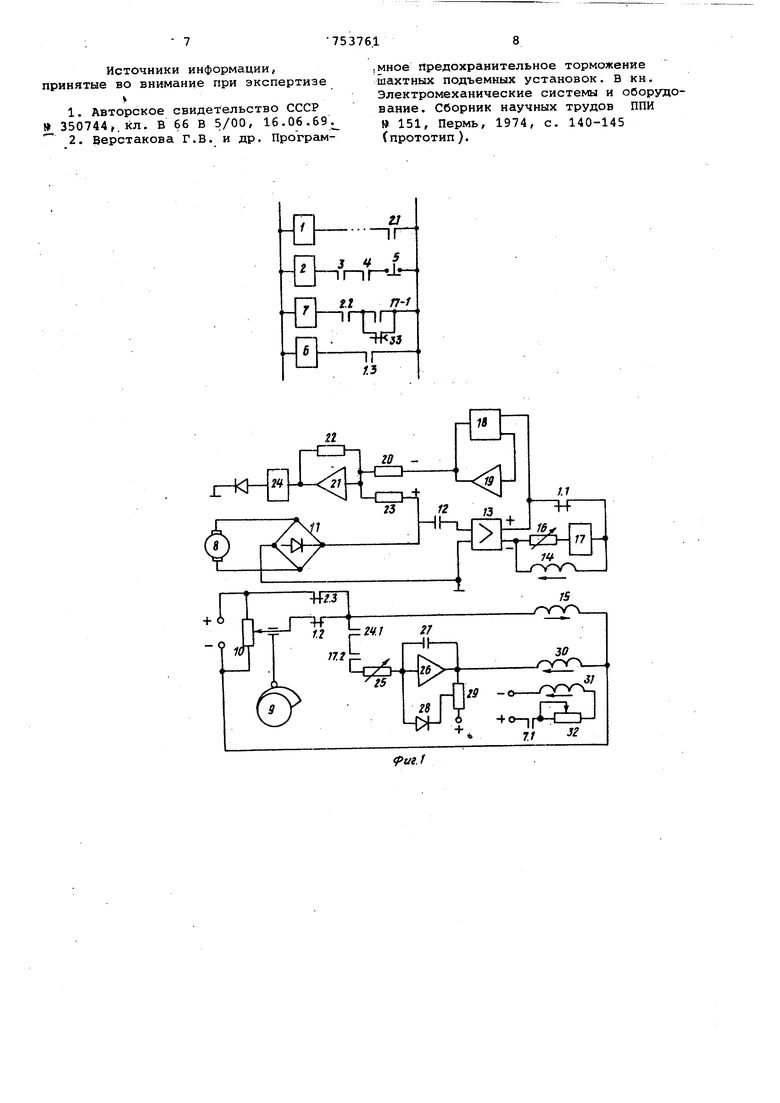
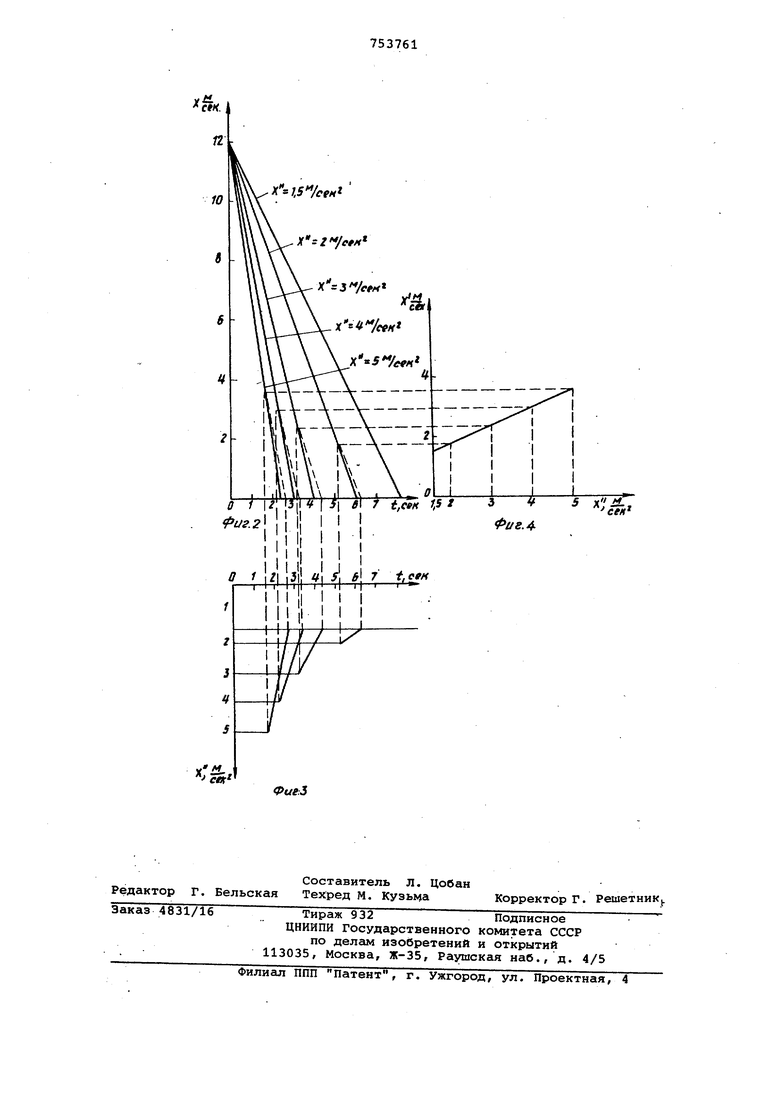
На фиг. 1 показана принципиальная схема устройства; на фиг. 2 - график изменения во времени t скорости х подъемной машины при постоянных замедлениях х , равных 1,5} 2; 3; 4 5 м/сек ; на фиг. 3 график снижения во времени t замедления х подъемной машины с 5; 4; 3 и 2 м/сек до 1,5 м/сек за время замедления, равное периоду Т собственных колебаний груженого сосуда, который принят равным 1 с.; на фиг. 4 - график зависимости эталонной скорости Хэ от действительного замедления х подъемно машины.
Устройство содержит датчики сигналов оптимального: экстренного торможения, включающие в себя соответственно контакты 1 и 2 предохранительного и экстренного торможения с контактами 1.1-1.3, 2.1-2.3, в цепь первогО из которых включены все контакт (не показаны) существующих аппаратов защиты и блокировок, сигнал которых требует остановки подъемной машины с оптимальным замедлением, находящимся в пределах, регламентированных . Правилами безопасности, а также за мыкающий контакт 2.1 контактора 2 экстренного торможения. В цепь контактора 2 включены контакты только тех аппаратов защиты, после срабатывания которых необходима остановка с максимально допустимым замедлением, например контакты 3 зг1щйты от бурения сосуда,контакты 4 защиты от чрезмерного провисания каната, контакты 5 аварийной кнопки и др.
В цепь защиты входит также реле 6 времени и контактор 7 тормозного магнита с замыкающим контактом 7,1.
Датчик скорости выполнен на тахогенераторе 8, а датчик положения сосуда в стволе представляет собой ретардирующий диск 9. Задатчик зг1медления выполнен на связанном с ретардирующим диском 9 потенциометре 10. Датчик замедления образован подключенным через выпрямитель 11 к тахогенератору 8 конденсатором 12 и усилителем 13, один из выходов которого соединен с одним из входов блока сравнения, образованного обмотками 14 и 15 управления. Этот же .выход усилителя через переменный резистор 16 соединен с элементом контроля отклонения действительного замедления от заданного, выполненнк1М на реле 17 контроля замедления с контактами 17.1, 17.2, причем контакты 17.1 включены последовательно с контактами 2.2 контактора 2 и конта-Ктором 7 тормозного магнита. Другой выход усилителя 13 соединен через размыкающие контакты 1.1 контак тора I с другим выводом реле 17 контроля замедления и со входом блока 18 нелинейности, параллельно которому включен усилитель 19 и выход которого через резистор 20 соединен с одним из входов другого блока сравнения, реализованного на усилителе 21, имеющим резистор 22 в цепи обратной связи и соединено вторым входом через резистор 23 с выходом выпрямителя 11. К выходу усилителя 21 подключено реле 24 программного режима, контакты 24.1 которого включены последовательно с контактами 17.2 реле 17 контроля замедления и переменным резистором 25, соединенным со входом блока формирования сигнала уменьшения замедления, реализованного на усилителе 26 и конденсаторе 27, образующих интегратор, и
0 на диоде 28 и резисторе 29. Последовательно с упомянутыми контактами включены размыкающие контакты 2.3 контактора 2, параллельно которым включены размыкающие контакты
5 1.2 контактора 1.
К выходу усилителя 26 подключена обмотка 30 программного торможения аппарата управления, входящая в состав блока программ торможения.
Имеется также входящая в состав
упомянутого блока обмотка 31 рабочего торможения, соединенная с источником питания через резистор 32 и замыкающие контакты 7.1 контактора; 7 тормозного магнита.
5 Если сигнал на предохранительное торможение следует от аппарата, контакты которого включены в цепь контактора 1, то по обмотке 15 управления течет ток, величина.которого
0 пропорциональная оптимальному замедлению, определяемому местоположением груженого сосуда.
Если обесточивается контактор 2, то независимо от мегстоположения сосудов обмотка 15 подключается контактором 2.3 на полное напряжение.
Обмотка 31 выполняет функции рабочего торможения, поэтом в рассматриваемом процессе через нее проходит 0 полный сигнал, направленный на растормаживание подъемной машины.
В случае экстренного торможения ; контактор 2 разрывает контактом 2.2 цепь контактора 7, который своим контактом 7.1 обесточивает обмотку 31, что соответствует максимальному TopMO3HOivty моменту.
Обмотка 30 осуществляет программное уменьшение величины замедления, закон которого определяется блоком 60 18 нелинейности и усилителями 19, 21 и 26.
Устройство работает следующим образом.
° При подаче сигнала на предохранительное торможение размыкающие контакты 1.1 и 1.2 контактора 1 подключают обмотки 14 и 15, магнитные потоки которых направлены встречно. По обмоткам протекают токи, пропорциональные оптимальному и действитель ному замедлению. Под действием разкости этих сигналов аппарат управления тормозом (например, регулятор давления) воздействует на органы навивки в направлении уменьшения рассогласования действительного и оптимального замедлений. Одновременно контакт 1.3 контактора 1 разрывает цепь реле 6 времени, выдержка которого равна времени срабатывания тормоза. Если за это время начинается процесс торможения и действительное замедление составляет более 1,5м/сек то реле 17 контроля замедления замыкаюг;им контактом 17.1 заблокирует контакт 33 в цепи контактора 7 тормозного магнита, а контактом 17.2 подготовляет цепь интегратора. Контактор 7 выполняет функции подачи сигнала на торможение органов навивки максимсшьным нерегулируемым тормозным усилием в случае неисправноет система программного предохранительного торможения, а также после остановки подъемной машины.
В зависимости от величины действительного замедления блок 18 нелинейности, работающий совместно с усилителем 19, выдает напряжение, пропорциональное скорости, при которой необходимо начать уменьшение величины замедления подъемной машины. Закон изменения в зависимости от действительного замедления скорости, при которой необходимо начать уменьшение замедления (эталонной скорости) , выводится из рассмотрения режима движения подъемной системы в период уменьшения замедления.
Зависимость эталонной скорости от действительного замедления реализуется с помощью диодных функциональ.ных преобразователей блока 18 нелинейности. Эталонная величина скорости сравнивается с действительной на усилителе 21. Так как положительный потенциал на входе усилителя 21 в начале процесса торможения больше отрицательного, то реле 24 программного режима не обтекается током. При снижении действительной скорости до эталонной реле 24 замыкает свои контакты 24.1 в цепи интегратора, на вход которого подается сигнал, пропорциональный оптимальному замедлению, а на его выходе формируется за- кон изменения сигнала в обмотке 30, магнитный поток которой направлен встречно сигналу задания. Суммарный сигнал регулирования при этом измеляется таким образом, что замедление
лодъемной машины, уменьшаясь по прямой, достигает своего нижнего допустимого значения за время,- равное периоду собственных колебаний груженого сосуда. Такое изменение сигнала регулирования достигается подбором резистора 25.
Если в процессе предохранительного торможения действительное замедление становится меньше нижнего допустимого значения (например, по причине неисправности системы регулирования) , то реле 17 отключает обмотку 30 и разрывает цепь контактора 7, контакты 7.1 которого обеспечивают обмотку 31; к органам навивки в этом случае прикладывается максимальное тормозное усилие. Эта операция осу-ществляется и после остановки подъемной машины, так как действитель ное замедление становится равным нулю.
Таким образом, устройство позволяет уменьшить динамические напряжения Б элементах подъемной установки при предохранительном торможеими, что повышает ее надежность и безопасность эксплуатации.
30
Формула изобретения
Устройство для управления предохранительным торможением подъемной
установки, содержащее датчики сигналов оптимального и экстренного торможения и положения сосудов в стволе, подключенные ко входам блока программ торможения, соединенный
с датчиком положения сосудов в стволе задатчик и датчик замедления, подключенные ко входам блока сравнения, выходом связанного с приводом тормоза подъемной машины, датчик скорости и элемент контроля отклонения действительного замедления от заданного, соединенный входом с датчиком замедления, о тли ч а ющ а е с я тем, что, с целью повыввния надежности путем уменьшения дннамических напряжений в элементах подъемной установки, оно снабжено блоком формирования сигнала уменьшения замедления, блоком нелинейности, подключенным входом к датчику замедления, и дополнительным блоком
сравнения, к одному из входов которого подключен выход блока нелинейности, к друхому - датчик скорости, а к выходу - блок формирования сигна-;
ла уменьшения замедления, соединенный дополнительно входом с задатчиком замедления и выходом элемента контроля отклонения действительного замедления от заданного, а выходом - со
входом блока программ торможения.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 350744 . кл. В 66 В 5/00 16.06.69. 2. Эерстакова Г.В. и др. Програм
|Мное предохранительное торможение шахтных подъемных установок, в кн. Электромеханические системы и оборудование. Сборник научных трудов ППИ 151, Пермь, 1974, с. 140-145 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| АВТОМАТИЗИРОВАННЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1969 |
|
SU257583A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство управления тормозом шахтной подъемной машины | 1988 |
|
SU1583342A1 |
| Устройство для регулируемого предохранительного торможения подъемной машины | 1978 |
|
SU783170A2 |
| Устройство для регулируемого предохранительного торможения подъемной машины | 1977 |
|
SU691375A1 |
| Устройство управления наклонной шахтной подъемной установкой | 1980 |
|
SU891550A1 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
75
30
tff -оССГ
281 Vт
I м1 М 1 i ik|yi ifi У
