ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1985 |
|
SU1379216A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| Устройство управления тормозом шахтной подъемной машины | 1988 |
|
SU1583342A1 |
| Устройство управления тормозом шахтной подъемной машины | 1989 |
|
SU1676981A1 |
| Устройство для предохранительного торможения шахтной подъемной машины | 1988 |
|
SU1680615A1 |
| Устройство для управления приводом шахтных подъемных машин | 1972 |
|
SU643412A1 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| Способ защиты подъемного сосуда от жесткой посадки и устройство для его осуществления | 1987 |
|
SU1444267A1 |
| Способ управления предохранительным торможением шахтной подъемной машины и устройство для его осуществления | 1988 |
|
SU1640093A1 |
Изобретение относится к шахтному подъему, конкретно к тормозным системам шахтных подъемных установок. Цель изобретения - повышение безопасности и надежности шахтной подъемной машины за счет ограничения замедления в режиме рабочего торможения. Устройство содержит тормозные цилиндры 1 и 2, электроклапаны
32 2 НО э5
38
С
ел го
S3
о.
VJ
3 и 4 с катушками (К) 5 и 6, редукционные клапаны 7 и 8. регуляторы 9 и 10 давления с К 11 и 12, воздухосборник 13, командоаппа- рат 38, выпрямительный мост 39 и два канала автоматического управления. В каждый из каналов введены по дополнительному сумматору 40 (41) и нормально открытому контакту 35 (36) контактора предохранительного торможения (ПТ). При ПТ размыкаИзобретение относится к шахтному подъему, в частности к тормозным системам шахтных подъемных установок.
Цель изобретения - повышение безопасности и надежности шахтной подъемной машины за счет ограничения замедления в режиме рабочего торможения.
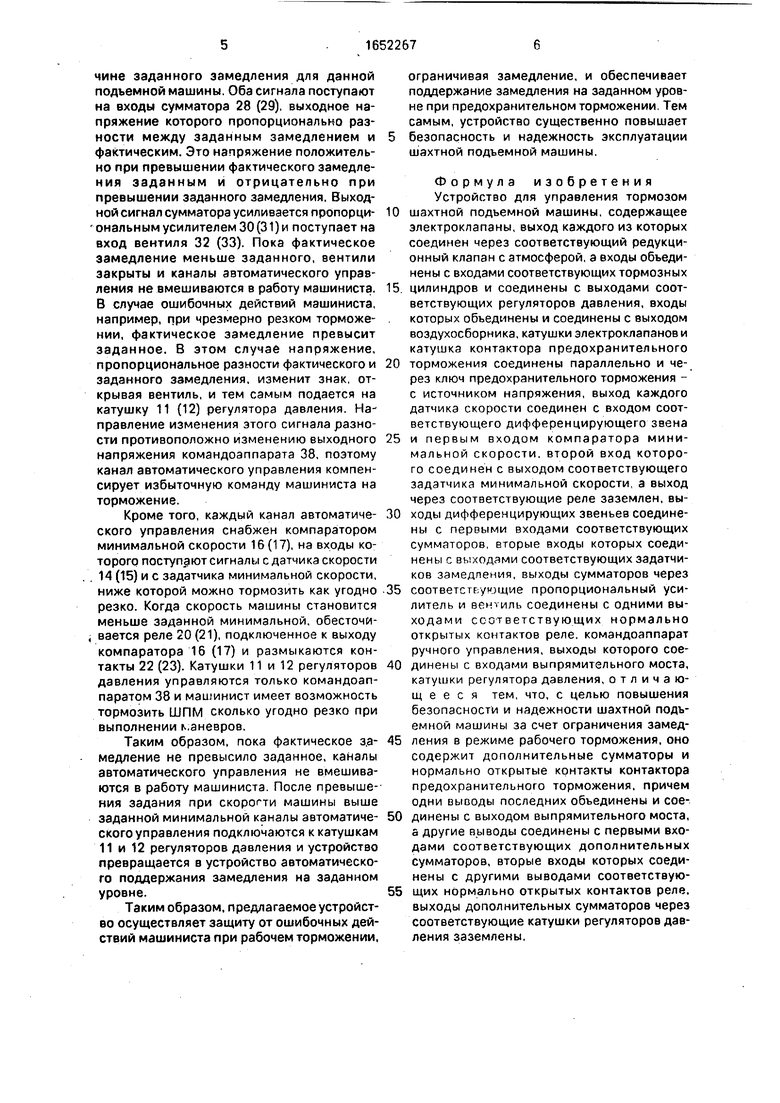
На чертеже изображена структурная схема.
Устройство содержит тормозные цилиндры 1 и 2. электроклапаны 3 и 4 с катушками 5 и 6, редукционные клапаны 7 и 8. регуляторы 9 и 10 давления с катушками 11 и 12, воздухосборник 13, аналоговые датчики 14 и 15 скорости, два компаратора 16 и 17 минимальной скорости, два задатчика 18 и 19 минимальной скорости, два реле 20 и 21 с нормально открытыми контактами 22 и 23, два дифференциальных эвена 24 и 25, два задатчика 26 и 27 замедления, два сумматора 28 и 29, два пропорциональных усилителя 30 и 31, два диода 32 и 33, катушку 34 контактора предохранительного торможения и два его нормально открытых контакта 35 и 36, ключ 37 предохранительного торможения, командоаппарат 38 ручного управления тормозом, выпрямительный мост 39 и два дополнительных сумматора 40 и41.
Устройство предназначено для работы в двух режимах: рабочего и предохранительного торможения подъемной машины.
При предохранительном торможении размыкание ключа 37 предохранительного торможения обесточивает контактор 34 предохранительного торможения, который размыкает свои нормально открытые контакты 35 и 36. При этом командоаппарат 38 отключается от катушек 11 и 12 регулятора давления. При размыкании ключа 37 обесточиваются катушки 5 и 6 электроклапанов 3 и 4, которые соединяют тормозные цилиндры 1 и 2 через редукционные клапаны 7 и 8 с атмосферой. Сброс давления в тормозных цилиндрах 1 и 2 осуществляется до величины, соответствующей выбору холостого хода, что создается соответствующей нается ключ 37 ПТ, обесточивается К 34 контактора ПТ и контакты 35 и 36 размыкаются. Таким образом, при ПТ управление тормозом осуществляется только автоматически. При рабочем торможении контакты 35 и 36 ПТ замкнуты и управление тормозом осуществляется от командоаппарата 38 с одновременным автоматическим контролем и коррекцией замедления. 1 ил.
стройкой редукционных клапанов 7 и 8. При этом разность между фактическим замедлением и заданным максимальна, выходное напряжение пропорционального усилителя
30 (31) отрицательно, вентиль 32 (33) закрыт и тока в катушках 11 и 12 не будет. Регуляторы 9 и 10 максимально открыты на выпуск воздуха из цилиндров 1 и 2, тормозной момент максимально резко возрастает. По мере роста фактического замедления и его превышения заданного в катушках 11 и 12 появится ток. и темп роста тормозного момента и замедления уменьшится.
Далее до момента спадания скорости до
уровня минимальной устройство работает в следующем режиме: отклонения фактического замедления в ту или иную сторону от заданного, например, вследствие колебаний усилий в канатах вызывает соответствующее изменение тока в катушках 11 и 12. которое возвращает замедление на заданный уровень. При спадении скорости до уровня минимальной размыкаются контакты 22 и 23 и реле 20 и 21. катушки 11 и 12
обесточиваются. Машина стопорится путем максимально быстрого выпуска воздуха из тормозных цилиндров 1 и 2 через регуляторы давления 9 и 10 в атмосферу.
В режиме рабочего торможения ключ 37
замкнут, катушки 5, 6 и 34 находятся под током, поэтому клапаны 3 и 4 закрыты, а нормально открытые контакты 35 и 36 соединяют командоаппарат 38 с катушками 11и 12 регуляторов давления через выпрямительный мост 39, сумматоры 40 и 41. Изменением положения рукоятки управления командоаппарата 38 регулируется ток в катушках 11 и 12 регуляторов давления и тем самым давление в тормозных цилиндрах 1
и 2. В то же время в двух идентичных каналах автоматического управления контролируется величина фактического замедления путем сравнения выходного сигнала дифференциального звена 24 (25), дифференцирующего сигнал аналогового датчика 14 (15) скорости, с выходным сигналом эадатчика 26 (27) замедления, соответствующим величине заданного замедления для данной подъемной машины. Оба сигнала поступают на входы сумматора 28 (29). выходное напряжение которого пропорционально разности между заданным замедлением и фактическим. Это напряжение положительно при превышении фактического замедле- ния заданным и отрицательно при превышении заданного замедления. Выходной сигнал сумматора усиливается пропорци- ональнымусилителемЗО(31)и поступает на вход вентиля 32 (33). Пока фактическое замедление меньше заданного, вентили закрыты и каналы автоматического управления не вмешиваются в работу машиниста. В случае ошибочных действий машиниста, например, при чрезмерно резком торможе нии, фактическое замедление превысит заданное. В этом случае напряжение, пропорциональное разности фактического и заданного замедления, изменит знак, открывая вентиль, и тем самым подается на катушку 11 (12) регулятора давления. Направление изменения этого сигнала разности противоположно изменению выходного напряжения командоаппарата 38, поэтому канал автоматического управления компенсирует избыточную команду машиниста на торможение.
Кроме того, каждый канал автоматического управления снабжен компаратором минимальной скорости 16 (17), на входы которого поступают сигналы с датчика скорости 14 (15) и с задатчика минимальной скорости, ниже которой можно тормозить как угодно резко. Когда скорость машины становится меньше заданной минимальной, обесточи- вается реле 20(21), подключенное к выходу компаратора 16 (17) и размыкаются контакты 22 (23), Катушки 11 и 12 регуляторов давления управляются только командоап- паратом 38 и машинист имеет возможность тормозить ШПМ сколько угодно резко при выполнении маневров.
Таким образом, пока фактическое замедление не превысило заданное, каналы автоматического управления не вмешиваются в работу машиниста. После превышения задания при скорогти машины выше заданной минимальной каналы автоматического управления подключаются к катушкам 11 и 12 регуляторов давления и устройство превращается в устройство автоматического поддержания замедления на заданном уровне.
Таким образом, предлагаемое устройство осуществляет защиту от ошибочных действий машиниста при рабочем торможении,
ограничивая замедление, и обеспечивает поддержание замедления на заданном уровне при предохранительном торможении. Тем самым, устройство существенно повышает безопасность и надежность эксплуатации шахтной подъемной машины.
Формула изобретения Устройство для управления тормозом
шахтной подьемной машины, содержащее электроклапаны, выход каждого из которых соединен через соответствующий редукционный клапан с атмосферой, а входы обьеди- нены с входами соответствующих тормозных
цилиндров и соединены с выходами соответствующих регуляторов давления, входы которых объединены и соединены с выходом воздухосборника, катушки электроклапанов и катушка контактора предохранительного
торможения соединены параллельно и через ключ предохранительного торможения - с источником напряжения, выход каждого датчика скорости соединен с входом соответствующего дифференцирующего звена
и первым входом компаратора минимальной скорости, второй вход которого соединен с выходом соответствующего задатчика минимальной скорости а выход через соответствующие реле заземлен, выходы дифференцирующих звеньев соединены с первыми входами соответствующих сумматоров, вторые входы которых соединены г. выходами соответствующих задатчи- ков замедления, выходы сумматоров через
соответстг /илдие пропорциональный усилитель и вентиль соединены с одними выходами соответствующих нормально открытых контактов реле, командоаппарат ручного управления, выходы которого соединены с входами выпрямительного моста, катушки регулятора давления, отличающееся тем, что, с целью повышения безопасности и надежности шахтной подъемной машины за счет ограничения замедления в режиме рабочего торможения, оно содержит дополнительные сумматоры и нормально открытые контакты контактора предохранительного торможения, причем одни выводы последних объединены и соединены с выходом выпрямительного моста, а другие выводы соединены с первыми входами соответствующих дополнительных сумматоров, вторые входы которых соединены с другими выводами соответствующих нормально открытых контактов реле, выходы дополнительных сумматоров через соответствующие катушки регуляторов давления заземлены.
| Устройство для управления тормозом шахтной подъемной машины | 1985 |
|
SU1379216A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
