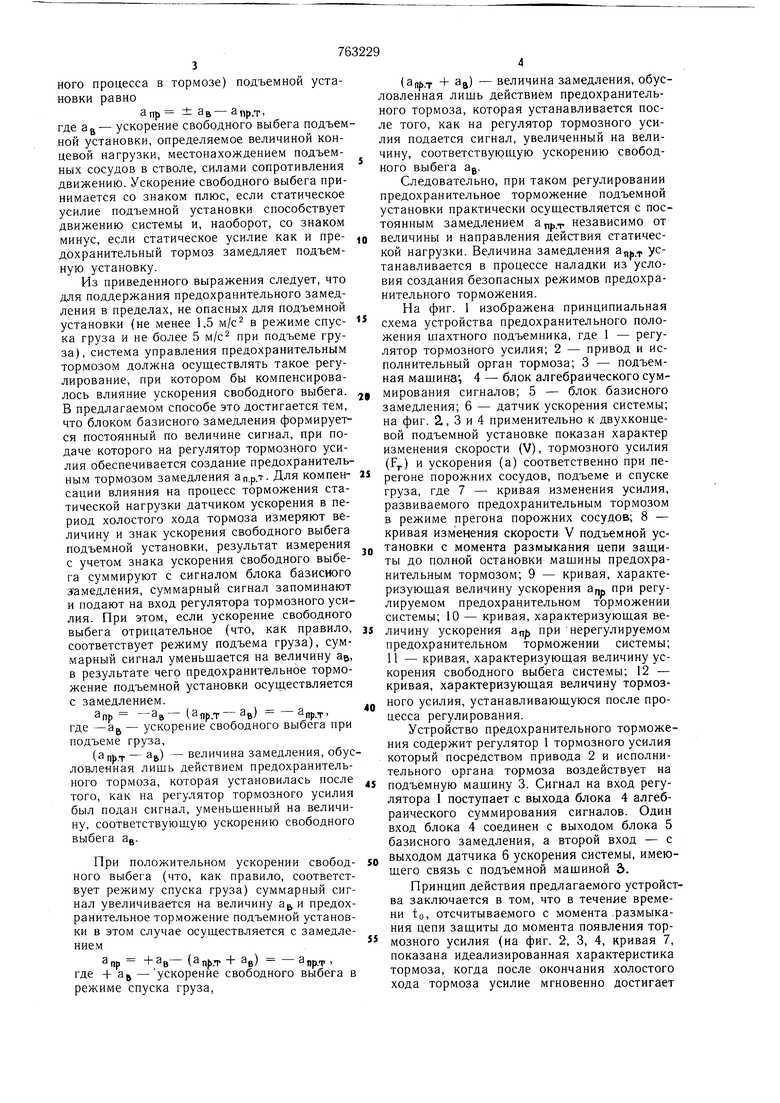
ного процесса в тормозе) подъемной установки равно апр ± Зв- ап|,.т, где а ц- ускорение свободного выбега подъем ной установки, определяемое величиной концевой нагрузки, местонахождением подъемных сосудов в стволе, силами сопротивления движению. Ускорение свободного выбега принимается со знаком плюс, если статическое усилие подъемной установки способствует движению системы и, наоборот, со знаком минус, если статическое усилие как и предохранительный тормоз замедляет подъемную установку. Из приведенного выражения следует, что для поддержания предохранительного замедления в пределах, не опасных для подъемной установки (не менее 1,5 м/с в режиме спуска груза и не более 5 м/с при подъеме груза), система управления предохранительным тормозом должна осуществлять такое регулирование, при котором бы компенсировалось влияние ускорения свободного выбега, В предлагаемом способе это достигается тем, что блоком базисного замедления формируется постоянный по величине сигнал, при подаче которого на регулятор тормозного усилия обеспечивается создание предохранительным тормозом замедления ап.р.т. Для компенсации влияния на процесс торможения статической нагрузки датчиком ускорения в период холостого хода тормоза измеряют величину и знак ускорения свободного выбега подъемной установки, результат измерения с учетом знака ускорения свободного выбега суммируют с сигналом блока базисного замедления, суммарный сигнал запоминают и подают на вход регулятора тормозного усилия. При этом, если ускорение свободного выбега отрицательное (что, как правило, соответствует режиму подъема груза), суммарный сигнал уменьшается на величину ав, в результате чего предохранительное торможение подъемной установки осуществляется с замедлением. ап() ъ (.т 3g) , где ускорение свободного выбега при подъеме груза, (эпь.т- 3) - величина замедления, обус ловленная лишь действием предохранительного тормоза, которая установилась после того, как на регулятор тормозного усилия был подан сигнал, уменьшенный на величину, соответствующую ускорению свободного выбега ац. При положительном ускорении свободного выбега (что, как правило, соответствует режиму спуска груза) суммарный сигнал увеличивается на величину а и предохранительное торможение подъемной установки в этом случае осуш.ествляется с замедлением +ав- (ап.т + ар) - а„р. -,I . Iр/(1. 1 где + а - ускорение свободного выбега в режиме спуска груза. (ап().т + Зд) - величина замедления, обусловленная лишь действием предохранительного тормоза, которая устанавливается после того, как на регулятор тормозного усилия подается сигнал, увеличенный на величину, соответствующую ускорению свободного выбега ац. Следовательно, при таком регулировании предохранительное торможение подъемной установки практически осуществляется с постоянным замедлением а .т независимо от величины и направления действия статической нагрузки. Величина замедления а,,, устанавливается в процессе наладки из условия создания безопасных режимов предохранительного торможения. На фиг. 1 изображена принципиальная схема устройства предохранительного положения щахтного подъемника, где 1 - регулятор тормозного усилия; 2 - привод и исполнительный орган тормоза; 3 - подъемная машина , 4 - блок алгебраического суммирования сигналов; 5 - блок базисного замедления; 6 - датчик ускорения системы; на фиг. 2, 3 и 4 применительно к двухконцевой подъемной установке показан характер изменения скорости (V), тормозного усилия (F) и ускорения (а) соответственно при перегоне порожних сосудов, подъеме и спуске груза, где 7 - кривая изменения усилия, развиваемого предохранительным тормозом в режиме прегона порожних сосудов; 8 - кривая изменения скорости V подъемной установки с момента размыкания цепи защиты до полной остановки машины предохранительным тормозом; 9 - кривая, характеризующая величину ускорения при регулируемом предохранительном тор.можении системы; 10 - кривая, характеризующая величину ускорения а при нерегулируемом предохранительном торможении системы; И - кривая, характеризующая величину ускорения свободного выбега системы; 12 - кривая, характеризующая величину тормозного усилия, устанавливающуюся после процесса регулирования. Устройство предохранительного торможения содержит регулятор 1 тормозного усилия который посредством привода 2 и исполнительного органа тормоза воздействует на подъемную машину 3. Сигнал на вход регулятора 1 поступает с выхода блока 4 алгебраического суммирования сигналов. Один вход блока 4 соединен с выходом блока 5 базисного замедления, а второй вход - с выходом датчика 6 ускорения системы, имеющего связь с подъемной мащиной 3. Принцип действия предлагаемого устройства заключается в том, что в течение времени to, отсчитываемого с момента ,размыкания цепи защиты до момента появления тормозного усилия (на фиг. 2, 3, 4, кривая 7, показана идеализированная характеристика тормоза, когда после окончания холостого хода тормоза усилие мгновенно достигает
максимального значения), датчик 6 измеряет величину и знак ускорения свободного выбега системы. В качестве датчика 6 может быть использовано, например, устройство, содержащее тахогенератор постоянного тока, кинематически связанный с подъемной машиной, и трансформатор, выполняющий роль дифференцирующего звена. Выход тахогенератора включен на первичную обмотку трансформатора. При возрастании скорости подъемной мащины во вторичной обмотке также индуктируется ток, но противоположного направления. Следовательно датчик б, построенный на описанном выше принципе, позволяет определить величину и знак ускорения свободного выбега системы. (-звп - при переподъеме груза и + а, - при спуске груза). Сигнал с датчика 6 поступает на один из входов датчика 4 алгебраического суммирования сигналов. Блок 4, во-первых, производит его алгебраическое суммирование с постоянным по величине и направлению сигналом блока 5 базисного замедления, а,во-вторых, результат суммирования запоминает.
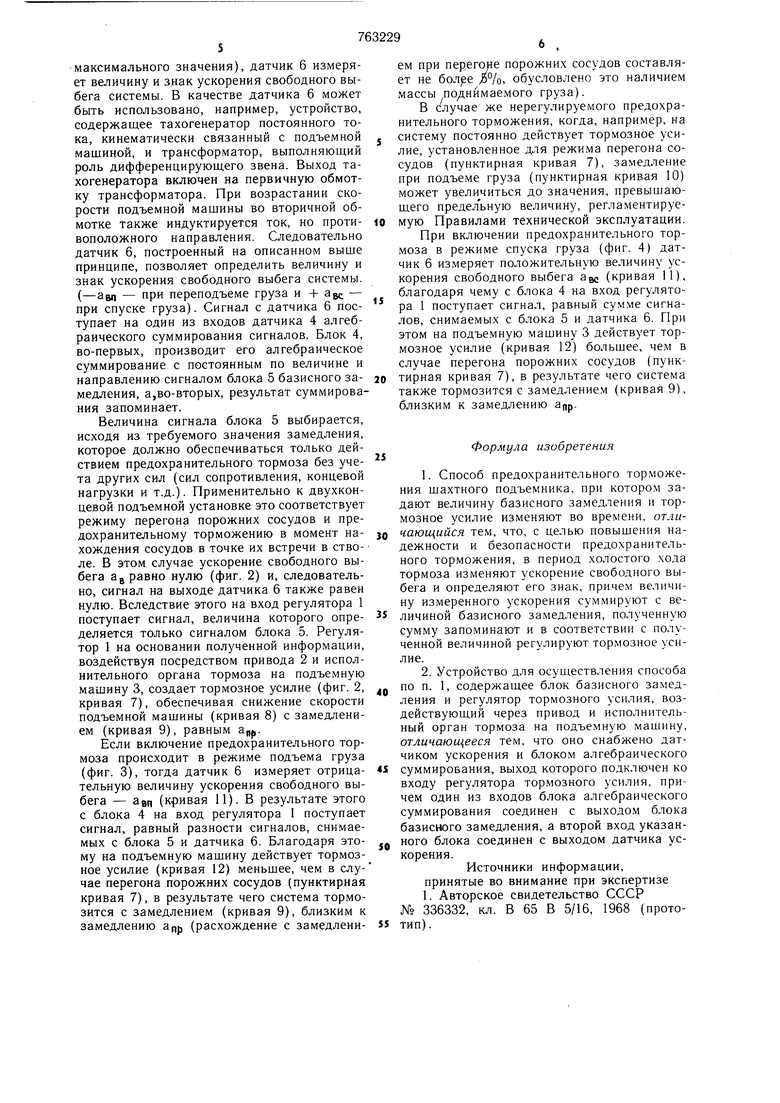
Величина сигнала блока 5 выбирается, исходя из требуемого значения замедления, которое должно обеспечиваться только действием предохранительного тормоза без учета других сил (сил сопротивления, концевой нагрузки и т.д.). Применительно к двухконцевой подъемной установке это соответствует режиму перегона порожних сосудов и предохранительному торможению в момент нахождения сосудов в точке их встречи в стволе. В этом случае ускорение свободного выбега а равно нулю (фиг. 2) и, следовательно, сигнал на выходе датчика 6 также равен нулю. Вследствие этого на вход регулятора 1 поступает сигнал, величина которого определяется только сигналом блока 5. Регулятор 1 на основании полученной информации, воздействуя посредством привода 2 и исполнительного органа тормоза на подъемную машину 3, создает тормозное усилие (фиг. 2, кривая 7), обеспечивая снижение скорости подъемной машины (кривая 8) с замедлением (кривая 9), равным а„р.
Если включение предохранительного тормоза происходит в режиме подъема груза (фиг. 3), тогда датчик 6 измеряет отрицательную величину ускорения свободного выбега - авп (кривая 11). В результате этого с блока 4 на вход регулятора 1 поступает сигнал, равный разности сигналов, снимаемых с блока 5 и датчика 6. Благодаря этому на подъемную машину действует тормозное усилие (кривая 12) меньшее, чем в случае перегона порожних сосудов (пунктирная кривая 7), в результате чего система тормозится с замедлением (кривая 9), близким к замедлению а„р (расхождение с замедлением при перегоне порожних сосудов составляет не болре %, обусловлено это наличием массы поднимаемого груза).
В случае же нерегулируемого предохранительного торможения, когда, например, на
систему постоянно действует тормозное усилие, установленное для режима перегона сосудов (пунктирная кривая 7), замедление при подъеме груза (пунктирная кривая 10) может увеличиться до значения, превышающего предельную величину, регламентируемую Правилами технической эксплуатации. При включении предохранительного тормоза в режиме спуска груза (фиг. 4) датчик 6 измеряет положительную величину ускорения свободного выбега авс (кривая 11), благодаря чему с блока 4 на вход регулятора 1 поступает сигнал, равный сумме сигналов, снимаемых с блока 5 и датчика 6. При этом на подъемную машину 3 действует тормозное усилие (кривая 12) большее, чем в случае перегона порожних сосудов (пунктирная кривая 7), в результате чего система также тормозится с замедлением (кривая 9), близким к замедлению апр.
Формула изобретения
1.Способ предохранительного торможения шахтного подъемника, при котором задают величину базисного замедления и тормозное усилие изменяют во времени, отличающийся тем, что, с целью повышения надежности и безопасности предохранительного торможения, в период холостого хода тормоза изменяют ускорение свободного выбега и определяют его знак, причем величину измеренного ускорения суммируют с величиной базисного замедления, полученную сумму запоминают и в соответствии с полученной величиной регулируют тормозное усилие.
2.Устройство для осуществления способа по п. 1, содержащее блок базисного замедления и регулятор тормозного усилия, воздействующий через привод и исполнительный орган тормоза на подъемную машину, отличающееся тем, что оно снабжено датчиком ускорения и 6vioKOM алгебраического суммирования, выход которого подключен ко входу регулятора тормозного усилия, причем один из входов блока алгебраического суммирования соединен с выходом блока базисного замедления, а второй вход указанного блока соединен с выходом датчика ускорения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 336332, кл. В 65 В 5/16, 1968 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ПРЕДОХРАНИТЕЛЬНОГО ТОРМОЖЕНИЯ | 1972 |
|
SU337332A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| Устройство для управления приводом шахтной подъемной машины | 1985 |
|
SU1296500A1 |
| Устройство определения параметров движения шахтных подъемных машин при аварийном торможении | 1990 |
|
SU1754612A1 |
| Устройство управления пневмогрузовым приводом тормоза шахтной подъемной машины | 1983 |
|
SU1245536A1 |
| Способ наладки и контроля параметров фрикционной рудничной подъемной установки | 1978 |
|
SU943163A1 |
| Способ дискретного управления предохранительным торможением | 1986 |
|
SU1447745A1 |
| Способ управления предохранительным торможением шахтной подъемной машины и устройство для его осуществления | 1988 |
|
SU1640093A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |

ФигЛ
,а,Рт}
