Изобретение относится к машиностроению и касается роботов и манипуляторов, используемых для механизации и автоматизации основных и вспомогательных операций в промышленности, например для загрузки и выгрузки деталей со станков.
Цель изобретения - снижение энергозатрат и повышение надежности за счет учета при формировании управляющего напряжения приводного электродвигателя направления дисбаланса подвижного звена.
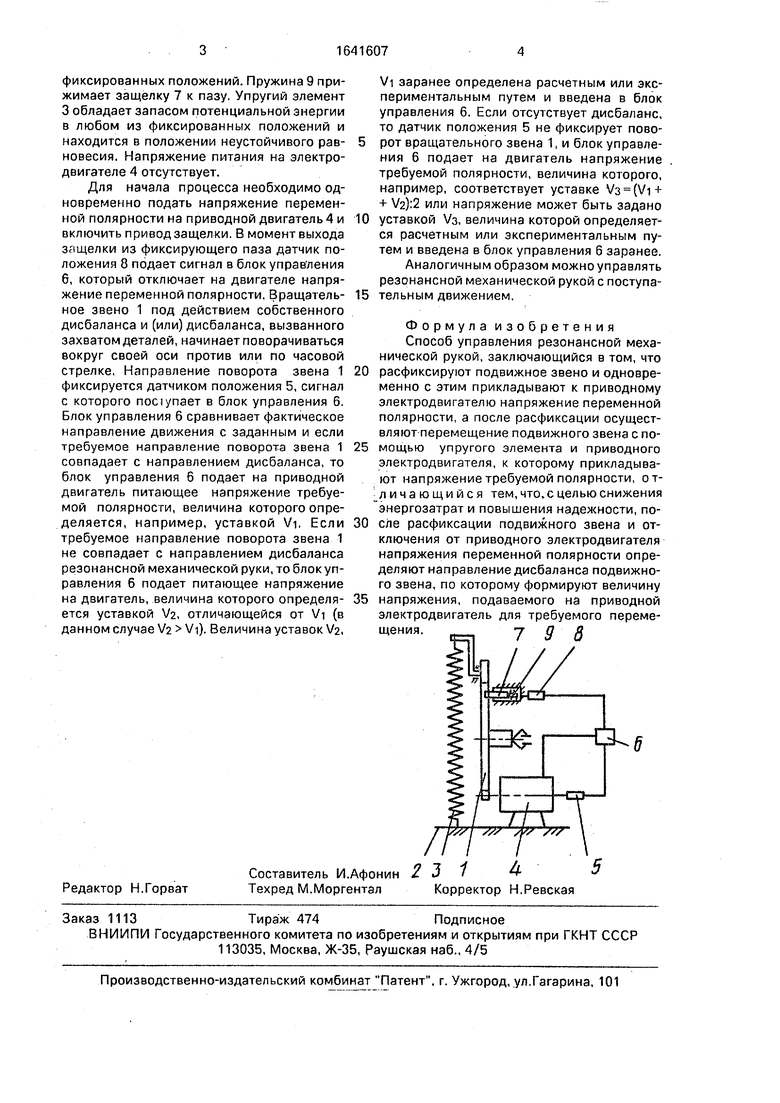
На чертеже представлена схема устрой; ства для реализации способа управления резонансной механической рукой.
Устройство содержит, например, вращательное звено 1 резонансной механической руки, связанное с основанием 2 упругим элементом 3. Вращательное звено 1 связано также с приводным электродвигателем 4, снабженным датчиком положения 5. Двигатель 4 и датчик положения 5 также связаны с блоком управления 6. Звено под
действием момента приводного двигателя 4 и момента, вызванного дисбалансом выходного звена и (или) дисбалансом закрепления деталей в схвате выходного звена, может поворачиваться вокруг своей оси против или по часовой стрелке. Во вращательном звене 1 имеется ряд пазов, с которыми взаимодействуют защелка 7, имеющая привод (не показан), связанный с блоком управления 6. На основании 2 расположен датчик положения 8, взаимодействующий с защелкой 7 и фиксирующий момент ее выхода из паза. Датчик 8 связан с блоком управления б, а защелка 7 связана с основанием 2 пружиной 9.
Способ осуществляют следующим образом.
В исходном положении защелка 7 мо- ,жет находиться а любом из пазов (что соответствует передаточному отношению между частями подвижного звена), тогда вращательное звено 1 тоже находится в одном из
ON
(
О
фиксированных положений. Пружина 9 прижимает защелку 7 к пазу, Упругий элемент 3 обладает запасом потенциальной энергии в любом из фиксированных положений и находится в положении неустойчивого равновесия. Напряжение питания на электродвигателе 4 отсутствует.
Для начала процесса необходимо одновременно подать напряжение переменной полярности на приводной двигатель 4 и включить привод защелки. В момент выхода защелки из фиксирующего паза датчик положения 8 подает сигнал в блок управления 6, который отключает на двигателе напряжение переменной полярности. Вращательное звено 1 под действием собственного дисбаланса и (или) дисбаланса, вызванного захватом деталей, начинает поворачиваться вокруг своей оси против или по часовой стрелке. Направление поворота звена 1 фиксируется датчиком положения 5, сигнал с которого пооупает в блок управления 6. Блок управления 6 сравнивает фактическое направление движения с заданным и если требуемое направление поворота звена 1 совпадает с направлением дисбаланса, то блок управления 6 подает на приводной двигатель питающее напряжение требуемой полярности, величина которого определяется, например, уставкой VL Если требуемое направление поворота звена 1 не совпадает с направлением дисбаланса резонансной механической руки, то блок управления 6 подает питающее напряжение на двигатель, величина которого определяется уставкой V2, отличающейся от Vi (в данном случае V2 Vi). Величина уставок Va,
Vi заранее определена расчетным или экспериментальным путем и введена в блок управления 6. Если отсутствует дисбаланс, то датчик положения 5 не фиксирует поворот вращательного звена 1, и блок управления 6 подает на двигатель напряжение требуемой полярности, величина которого, например, соответствует уставке V3 (Vi + + V2):2 или напряжение может быть задано
уставкой Уз, величина которой определяется расчетным или экспериментальным путем и введена в блок управления 6 заранее. Аналогичным образом можно управлять резонансной механической рукой с поступательным движением.
0
5
0
5
Формула изобретения Способ управления резонансной механической рукой, заключающийся в том, что расфиксируют подвижное звено и одновременно с этим прикладывают к приводному электродвигателю напряжение переменной полярности, а после расфиксации осуществляют перемещение подвижного звена с помощью упругого элемента и приводного электродвигателя, к которому прикладывают напряжение требуемой полярности, отличающийся тем, что,с целью снижения энергозатрат и повышения надежности, после расфиксации подвижного звена и отключения от приводного электродвигателя напряжения переменной полярности определяют направление дисбаланса подвижного звена, по которому формируют величину напряжения, подаваемого на приводной электродвигатель для требуемого перемещения. „ 798
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления резонансной механической рукой | 1986 |
|
SU1366388A1 |
| Способ контроля механической передачи звеньев манипуляторов | 1989 |
|
SU1803319A1 |
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| Способ управления резонансной механической рукой | 1987 |
|
SU1553373A1 |
| Способ управления резонансной механической рукой | 1986 |
|
SU1682160A1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| ЗАПИРАЮЩИЕ УСТРОЙСТВА ДЛЯ АВТОМОБИЛЬНЫХ ДВЕРЕЙ ИЛИ ДРУГИХ ЗАПОРНЫХ ЭЛЕМЕНТОВ | 1997 |
|
RU2194837C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2690895C2 |
| МЕХАНИЗИРОВАННАЯ МАШИНА ДЛЯ ОЧИСТКИ ДРЕНАЖНЫХ ТРУБ | 2013 |
|
RU2623240C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ЗАКРЫВАЮЩИЙ ПРИВОД И ПУСКОВОЙ ПРИВОД, РАБОТАЮЩИЕ ОТ ОДНОГО ПОВОРАЧИВАЕМОГО ВЫХОДА | 2014 |
|
RU2650585C2 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах и манипуляторах. Цель изобретения - снижение энергозатрат и повышение надежности. Для этого при управлении резонансной механической рукой для ее перемещения необходимо одновременно подать напряжение переменной полярности на приводной электродвигатель подвижного звена и расфиксировать его. После этого отключается напряжение переменной полярности и фиксируется направление движения подвижного звена, определяемое направлением дисбаланса1. Величина подаваемого затем на приводной электродвигатель напряжения для требуемого перемещения определяется тем, совпадает ли требуемое направление движения с направлением дисбаланса или нет. 1 ил. Ј
| Способ управления резонансной механической рукой | 1986 |
|
SU1366388A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
