Изобретение относится к машиностроению и может использоваться для автоматизации различных основных и вспомогательных операций.
Целью изобретения является расширение функциональных возможностей за счет-обеспечения выхода подвижного звена руки из нейтрального положения в требуемое, заранее заданное положе- ние, а также повышение надежности работы за счет исключения удара при фиксации звена в требуемом положении.
Способ управления заключается в том, что при выводе подвижного звена, находящегося в состоянии покоя в ней- тральном положении, на требуемый упор1 прикладывают к приводному двигателю управляющий сигнал некоторой полярности дй тех пор, пока подвижное звено не достигнет заранее заданной координаты хг или не изменится знак скорости звена, затем изменяют полярность управляющего сигнала к прикладывают его до тех пор, пока подвижное звено не достигнет заранее заданной координаты х, или не изменится знак скорости звена, далее процесс повторяют аналогичным образом, задавая последовательно координаты х3 , х4,...,х h до тех пор, пока подвижное звено не достигнет требуемого положения позиционирования, причем в качестве координаты х можно выбрать, например, координату, соответствующую первой ос- тановке подвижного звена (при первом, приложении управляющего сигнала), величины прямого и обратного управляющего сигнала могут отличаться друг от друга, кроме того, координату х . можно задавать таким образом, что
х
i+ г
- х . | const или |х х.|
уменьшается с увеличением г.
На чертеже представлена схема, поясняющая принцип работы способа.
Подвижное звено 1 кинематически связано с электродвигателем 2 и может Нести на себе следующее звено, например захват. Подвижное звено 1, связанное с упругим элементом 3 установ- лено на предыдущем звене, в данном случае на основании 4. Кроме того, ,- упругий элемент 3 крепится к основанию 4. Основание 4 оснащено упорами 5 и 6 крайних положений. Ответная часть 7 упоров находится на подвижном звене 1. Система управления резонансной механической рукой может содержат управляющее устройство, например микро-ЭВМ, источник питания двигателя датчики положения, датчик скорости.
Способ управления реализуется следующим образом.
В исходном положении упругий элемент 3, например пружина;не взведен, подвижное звено 1 находится в состоянии покоя. Его положению соответствует координата х0. Вывод звена из этого состояния на какой-либо из упоров 5 или 6 происходит автоматически с помощью электродвигателя 2, для чего раскачивают подвижное звено 1, попеременно включая электродвигатель в прямом и реверсивном направлениях. Причем прикладывают напряжение некоторой полярности до тех пор, пока подвижное звено не достигнет координаты х , затем изменяют полярность питающего напряжения„ Координата х может принимать значения от нуля до координаты, соответствующей остановке подвижного звена при первом приложении питающего напряжения„ Если координата х1 выбрана меньше координаты, соответствующей остановке подвижного звена, то звено будет еще некоторое время двигаться в прежнем направлении но при этом происходит интенсивное торможение, поскольку изменилась полярность питающего напряжения электродвигателя. Как частный случай за координату х1 можно принять координату, соответствующую остановке подвижного звена при первом приложении питающего напряжения. После того, как звено достигнет положения, соответствующего координате х1 ив результате изменения полярности питающего напряжения происходит торможение, а затем и его остановка, оно будет двигаться в другую сторону, пока не достигнет координаты х, при этом повторяется вся последовательность действий, что и при достижении звеном координаты х, Так продолжается до тех пор, пока подвижное звено не выйдет на какой- либо из упоров 5 или 6. Этим достигается эффект более плавного выхода подвижного звена на упор. Последовательность координат х1, кг,... ,х задается управляющим устройством. Если какая-либо координата х из заданной последовательности координат выбрана большей той, которой соответствует остановка подвижного звена, то полярность питающего напряжения электродвигателя изменяется при изменении
М
знака скорости подвижного звена. Для того, чтобы подвижное звено выходило на требуемый упор, величина прямого и обратного напряжений питания электродвигателя выбирается различной. Особенно это важно при большом дисбалансе или при действии каких-либо возмущающих сил, например силы тяжести, когда основание 4 находится в наклон- ном положении о На требуемый упор также можно выйти, задавая соответствующим образом последовательность координат. Например, если задать координаты следующим образом |х1 | Ix Ј.(, |хэ 1 , |х 5 | х4 |, то звено выйдет на упор 5, соответственно при равных расстояниях от точки с координатой х0 до обоих упоров 5 и 6.
Формула изобретения
4.Способ по пп. 1-3, отли чающийся тем, что величина шага между соответствующими заданн
1. Способ управления резонансной механической рукой, преимущественно для режима ее раскачки из нейтрально- 5 ми координатами положения является го положения, заключающийся в переме- постоянной, щении подвижного звена руки с помощью упругих элементов и приводного двигателя, к которому прикладывают знакопеременный управляющий сигнал до момента фиксации подвижного звена в
5. Способ по пп. 1-3, отли чающийся тем, что величин шага между соответствующими заданны 30 ми координатами положения является убывающей при возрастании номера ко ординат положения.
требуемом положении, причем условием
5
0
изменения знака управляющего сигнала является изменение знака скорости , движения звена, отличающий- с я тем, что, с целью расширения функциональных возможностей и повышения надежности в работе, в качестве дополнительного условия изменения . знака управляющего сигнала используют условие достижения подвижным звеном заранее заданных координат положения
2.Способ по п. 1, отличающийся тем, что в качестве первой заданной координаты положения используют координату, соответствующую первой остановке подвижного зве- , на.
3.Способ по пп. 1 и 2, отличающийся тем, что величины прямого .и обратного управляющего сигнала не равны между собой.
4.Способ по пп. 1-3, отличающийся тем, что величина шага между соответствующими заданны5 ми координатами положения является постоянной,
ми координатами положения является постоянной,
5. Способ по пп. 1-3, отличающийся тем, что величина шага между соответствующими заданны- ми координатами положения является убывающей при возрастании номера координат положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления резонансной механической рукой | 1986 |
|
SU1682160A1 |
| Способ управления резонансной механической рукой | 1989 |
|
SU1641607A1 |
| Устройство для синхронного перемещения рабочего органа станка | 1985 |
|
SU1294570A1 |
| Устройство для управления электродвигателем механизма поворота карьерного экскаватора | 1986 |
|
SU1461839A1 |
| Электрогидравлический усилитель системы управления гидравличесим прессом | 1976 |
|
SU582995A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| Устройство для управления движущимся объектом | 1968 |
|
SU722503A3 |
| Устройство управления усилием схвата манипулятора | 1985 |
|
SU1266733A1 |
| Способ формирования пространственных траекторий движений звеньев тела спортсмена | 1990 |
|
SU1795895A3 |
| Устройство для измерения размеров резьбы | 1987 |
|
SU1511579A1 |
Изобретение относится к машиностроению и может использоваться для автоматизации различных основных и вспомогательных операций. Цель изобретения - повышение надежности работы и расширение функциональных возможностей. При выводе подвижного звена 1, находящегося в состоянии покоя, на требуемый упор 5 или 6 прикладывают к приводному двигателю напряжение некоторой полярности до тех пор, пока подвижное звено 1 не достигнет заранее заданной координаты X1 или у него не изменится знак скорости. Затем изменяют полярность питающего напряжения двигателя и прикладывают его, пока звено не достигнет заранее заданной координаты X2 или не изменится знак скорости звена, и так далее - до выхода звена 1 на упор 5 или 6. Последовательность координат X1...XN задается управляющим устройством. Как частный случай за координату X1 можно принять координату, соответствующую первой остановке звена 1 при первом приложении питающего напряжения. Величины прямого и обратного напряжений могут отличаться друг от друга. Кроме того, координату XI можно выбирать таким образом, что /XI+2 - XI/=CONST или /XI+2-XI/ уменьшается с увеличением I. 4 з.п. ф-лы, 1 ил.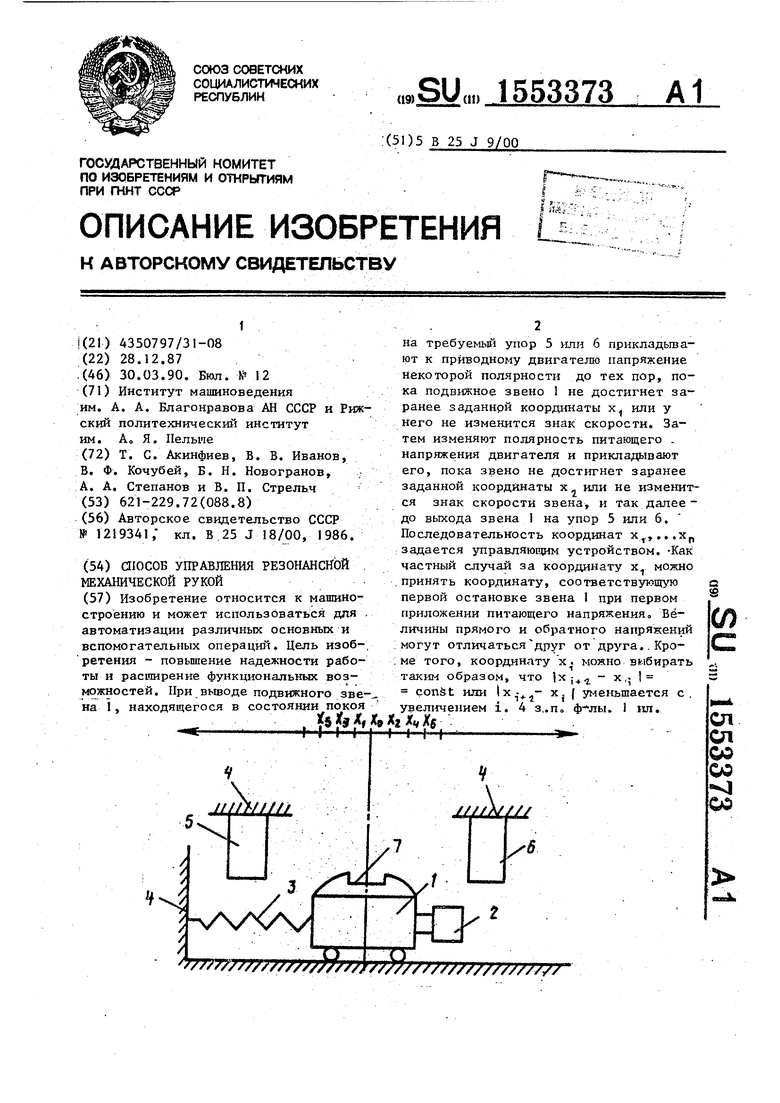
| Привод звена резонансной механической руки | 1982 |
|
SU1219341A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
