Изобретение относится к машиностроению и касается роботов и манипуляторов, используемых для механизации и автоматизации основных и вспомогательных операций в промышленности, например для загрузки и выгрузки деталей со станков в машиностроительном производстве.
Цель изобретения - повышение достоверности контроля механической передачи.
На фиг.1 представлена схема устройства для реализации способа; на фиг,2 - подг пружиненная защелка.
Устройство содержит подвижное звено 1 резонансной механической руки, связанное с основанием 2 упругим элементом 3. Подвижное звено 1 связано также-через блок управления 7. Подвижное звено 1 под действием момента приводного электродвигателя может поворачиваться вокруг своей оси против или по часовой стрелке,
В подвижном, звене имеются два паза, с которыми взаимодействует защелка 8, связанная с основанием 2 упругим элементом 9.
Способ осуществляется следующим образом. В исходном положении защелка 8 может находиться в любом из двух пазов, тогда подвижное звено 1 тоже находится в одном из фиксированных положений. Упругий элемент 9 прижимает защелку 8 к пазу. . Упругий элемент 3 обладает запасом потенциальной энергии в любом из двух фиксированных положений. Напряжение питания на электродвигателе 5 отсутствует. Датчик положения б и блок управления 7 отключены. .
Для начала процесса на приводной электродвигатель 5 блок управления 7 подает напряжение переменной полярности. При этом подвижное звено 1 зафиксировано двусторонней беззазорной защелкой 8 (или подпружиненной защелкой, см. фиг.2) неподвижно, а вал приводного электродвигателя из-за наличия зазоров в механической передаче между электродвигателем 5 и подвижным звеном 1 совершает вращение против и по часовой стрелке. Угол поворота вала измеряют датчиком положения 6, информация которого поступает в блок управления 7, регулирующий частоту напряжения
переменной полярности в пределах от частоты W.i. при которой не происходит выстоя вала приводного электродвигателя до частоты Л/2, величину которой определяют появлением вы стоя вала приводного электродвигателя. Измеренное датчиком положения 6 при частоте Л/2 значение угла
поворота вала приводного электродвигателя поступает в блок управления 7, где оно сравнивается с уставкой: если измеряемая
величина находится в поле допуска уставки то блок управления 7 включает привод защелки для выведения ее из фиксирующего паза, в противном случае блок управления 7
выключает приводной электродвигатель 5 и формирует код дефекта кинематической цепи.
Частоты Wi и Wa могут быть определены теоретически или экспериментально заранее, исходя соответственно из величины нижней и верхней границ допуска на зазор в механической передаче. Причем при частоте Wi величина угла поворота вала электродвигателя должна быть такова, что
допустимый зазор в механической передаче полностью не выбирается и выстой вала в крайних положениях не происходит, следовательно при частоте Wi нельзя измерить находящийся в поле допуска зазор механической передачи.
Так как реальный зазор кинематической цепи заранее не известен, то, чтобы его измерить, необходимо регулировать частоту.в пределах от Wi до Л/г, когда угол поворота
вала станет таков, что будет полностью выбираться зазор механической передачи и произойдет выстой вала электродвигателя в его крайних положениях. Таким образом, при частоте Л/2 можно измерить зазор механической передачи.
Если определить заранее частоту Wa, то можно не регулировать частоту в пределах и сразу подавать на электродвигатель напряжение с частотой W2 или с частотой ЛМ Л/а. При этом гарантировано угол поворота вала соответствует реальному значению зазора в:механической передаче. Если на электродвигатель сразу подавать напряжение с частотой, значительно
меньшей Wa, то можно измерять практически любой зазор в механической передаче, но из-за малого значения частоты время контроля механической передачи резко возрастает.
Использование заявленного способа позволяет производить контроль зазора механической передачи, что повышает достоверность контроля.
50
Формула изобретения
Способ контроля механической передачи звеньев манипуляторов, заключающийся в том, что прикладывают к входному валу передачи колебания и измеряют угол его поворота, отличающийся тем, что, с целью повышения достоверности контроля, выходной вал передачи фиксируют, а колебания входного вала производят с переменной частотой, изменяющейся в пределах от
частоты, при которой нет выстоя вала, до частоты, при которой появляется выстой вала, и при этой частоте измеряют угол мо поворота.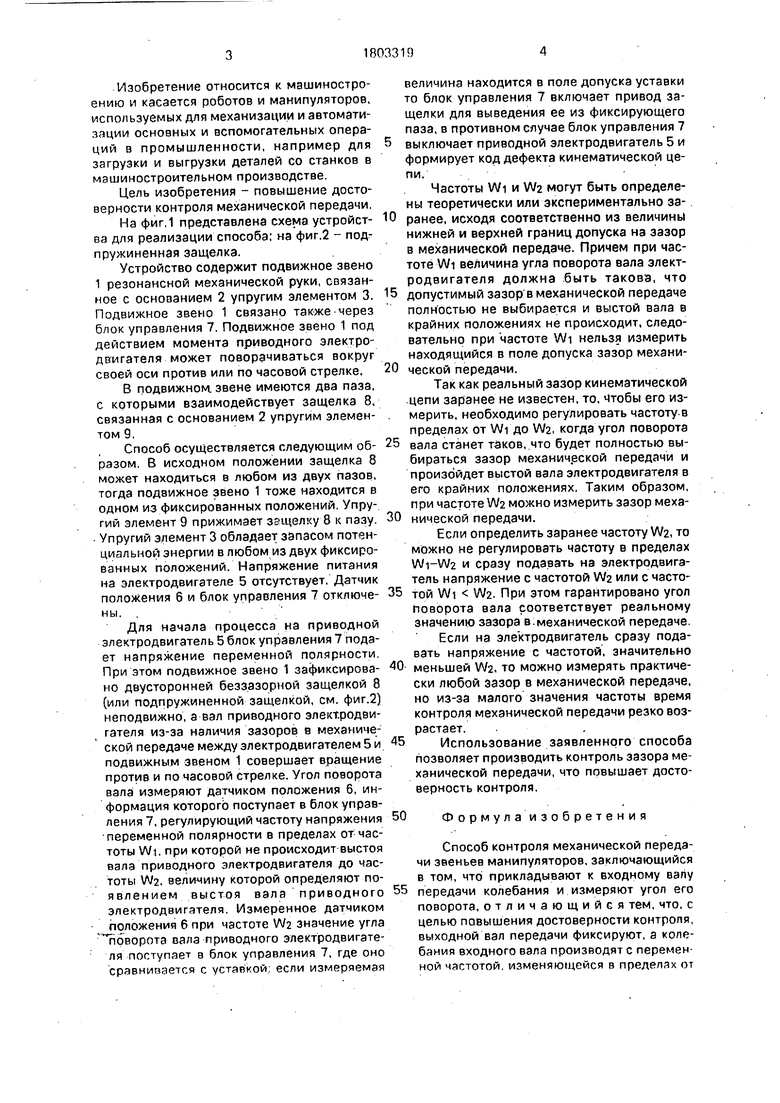
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для бракеража ампул, наполненных прозрачной жидкостью | 1977 |
|
SU682799A1 |
| МЕХАНИЗМ С ВЫСТОЕМ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2282082C1 |
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2486390C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ВЫХОДНОГО ЗВЕНА КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 1993 |
|
RU2066858C1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2236343C2 |
| Способ проверки срабатывания сигнального механизма будильника и устройство для его осуществления | 1986 |
|
SU1456927A1 |
| ПРЕСС ЛИСТОШТАМПОВОЧНЫЙ КРИВОШИПНЫЙ ДВОЙНОГО ДЕЙСТВИЯ | 2007 |
|
RU2355576C2 |

Фиг. 2
| Патент ФРГ № 3341591, кл-СОШ 13/02, 1984 |
