Изобретение относится к кораблевождению, в частности к способам определения поправок лага путем определения эталонных длин пробега (мерных отрезков), и может быть использовано для определения поправок лага в необорудованных специальными техническими средствами открытых районах моря
Цель изобретения - повышение точности и расширение эксплуатационных возможностей.
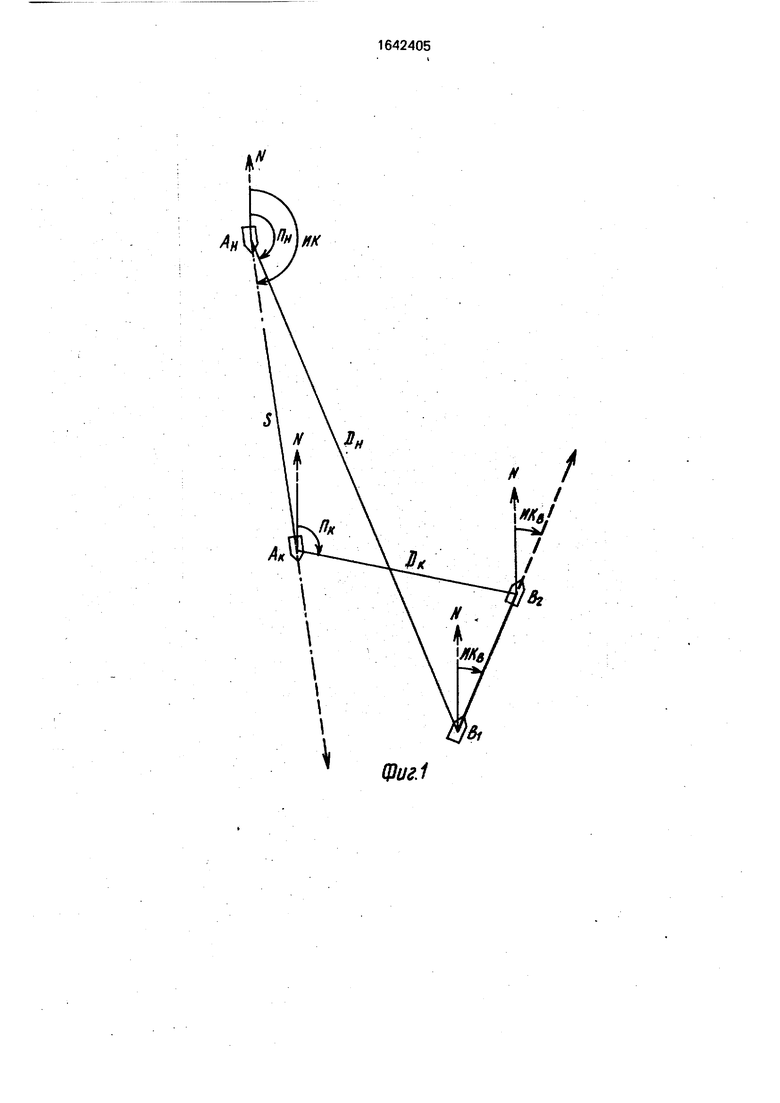
На фиг. 1 и 2 представлены пространственные диаграммы, поясняющие сущность способа.
Способ заключается в следующем.
Два судна (А и В) следуют заданными непараллельными курсами с заданной скоростью. В начальный момент времени в точке АН с судна А измеряют расстояние DH до судна В, пеленг на него Пн, снимают отсчет лага О/И. Затем по прошествии определенного отрезка времени (или расстояния по лагу 5л) в точке А« с судна А снова измеряют расстояние DK до судна В, пеленг на него Пк, снимают отсчет лага ОЛа.
Для определения пройденного судном А искомого расстояния S на карте вмещают отрезок, равный расстоянию DH, по направлению пеленга Пи между линиями курсов судов (точки АН и В), затем отрезок, равный расстоянию DK, по направлению пеленга Пк (точки А, Ва).
Вследствие того, что курсы судов непараллельны друг другу, точки АН, Bi, А, В2 однозначно располагаются на линиях курсов судов А и В и, следовательно, отрезок S есть расстояние, пройденное судном А между двумя моментами измерений. Таких измерений может быть несколько (моменты наблюдений отмечены на фиг. 1 точками) и, следовательно, получено несколько мерных отрезков Si
Тогда поправка лага Д п может быть вычислена по формуле
(Л
С
о
N3
О СЛ
Дл
Si - Sn
100%,
где Sni - разность отсчетов лагов на моменты наблюдений, А поправка лага поданным п мерных отрезков по формуле
Ал 4 Ј АЯ|.
пп 1
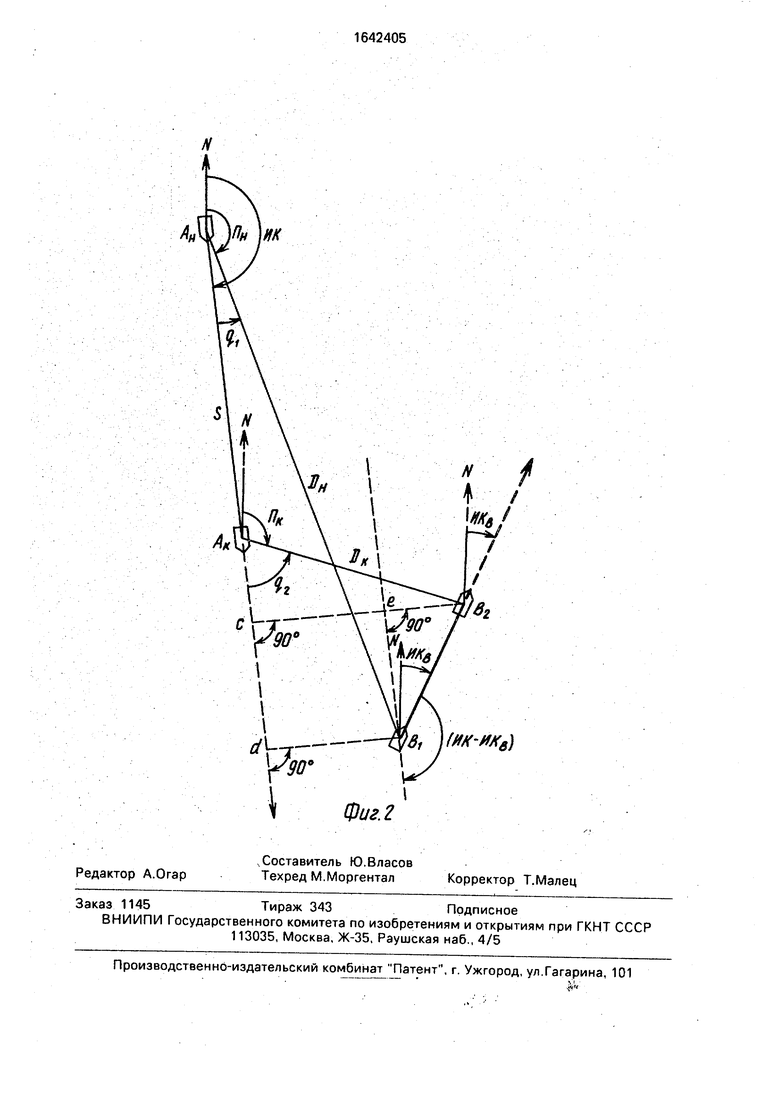
Искомое расстояние S может быть рассчитано и аналитически. Для вывода расчетной формулы определения S воспользуемся диаграммой на фиг. 2, где приняты следующие обозначения: ИК - курс судна, на котором тарируют лаг; ИКВ - курс второго судна (судна В); Он, DK - расстояния до судна В из начальной (Ан) и конечной (Ак) точек мерного образца; qi, Q2 - курсовые углы второго судна в начальной и конечной точках наблюдений.
Из фиг. 2 следует, что
S Aid - А2С - cd Di cos qi - Da cos qa -eB2Ctg HKB - (ИК - 180°) Di cos qi -Da cos qz + (D2 sin q2 - Di sin qi) ctg(HK -ИКВ)
или, окончательно, в функциях измеряемых величин
S - (HK - Hi) - sln(HK - m) ctg(MK - - ИКВ) - (HK - П2) - sln(HK - П2) х
x ctg(HK - ИКВ).
Формула изобретения Способ тарировки лага, следующего непараллельным курсом к курсу второго суд0
5
на, заключающийся в прохождении судном мерного отрезка пути, измерении расстояния до второго судна и определении поправки лага из сравнения длины мерного отрезка с пройденным расстоянием по показаниям лага, отличающийся тем, что, с целью расширения эксплуатационных возможностей и повышения точности, в начальной и конечной точках мерного отрезка одновременно с измерением расстояния до второго судна измеряют пеленг на него, при этом длину мерного отрезка и поправку лага Ал определяют как
S - (ИК - Пн) -slnfHK - Пн) стд(ИК - ИК8)3 - Ок со8{ИК - Пк) - sln(HK - Л) х
х«д(ИК-ИКв)3;
Ая(%)
S-S, 5л
100
где Он, DK - расстояние до второго судна из начальной (н) и конечной (к) точек мерного отрезка;
Пн. Пк - пеленги на второе судно;
ИК - истинный курс судна, на котором тарируют лаг;
ИКВ - истинный курс второго судна;
5л - пройденное расстояние по показаниям лага.
Щиг.1
(ик-мв)
Фиг. Z
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СОВМЕСТИМОСТИ ИНТЕРФЕЙСОВ | 2017 |
|
RU2663549C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ ПОПЕРЕЧНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ СУДНА ПРИ КАЛИБРОВКЕ ЛАГОВ НА ВИЗУАЛЬНОЙ ТРАВЕРЗНОЙ МЕРНОЙ ЛИНИИ С ТЕОДОЛИТНЫМИ ПОСТАМИ | 2007 |
|
RU2334997C1 |
| Способ тарировки лага | 1976 |
|
SU601618A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПРИ КАЛИБРОВКЕ ЛАГОВ НА ГИДРОАКУСТИЧЕСКОЙ ТРАВЕРЗНОЙ МЕРНОЙ ЛИНИИ | 2003 |
|
RU2259572C2 |
| Способ калибровки лага, установленного на подводном аппарате | 2023 |
|
RU2800186C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПО ИЗМЕРЕНИЯМ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2550299C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Способ определения скоростных характеристик морских течений с судна | 1982 |
|
SU1040420A1 |
Изобретение относится к приборостроению и может быть использовано для определения поправок лага в необорудованных специальными техническими средствами открытых районах моря. Целью изобретения является повышение точности и расширение эксплуатационных возможностей. Два судна следуют заданными непараллельными курсами, при этом в начальной и конечной точках мерного отрезка одновременно с измерением расстояния от первого до второго судна измеряют пеленг на него и определяют длину мерного отрезка и поправку лага.
| Способ тарировки лага | 1976 |
|
SU601618A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
