Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения скорости обитаемых и необитаемых подводных аппаратов (ПА).
Одним из условий безопасного кораблевождения ПА является постоянный контроль его скорости. Основным средством контроля скорости в подводном положении является лаг. Лаги делятся на абсолютные (гидроакустические), измеряющие скорость ПА относительно грунта, и относительные (электромагнитные либо гидродинамические), измеряющие скорость относительно воды [1-5]. Поскольку для кораблевождения необходимо знание скорости судна относительно грунта, предпочтительно использовать абсолютный лаг. Однако абсолютный лаг имеет ограничение по глубине под килём, которое определяется размером гидроакустической антенны (и соответственно частотой излучаемого сигнала), которую можно разместить на судне. Поскольку размеры ПА ограничены, на них удаётся установить гидроакустическую антенну с размерами, обеспечивающими измерение скорости до глубин не более 400 м. Ввиду этого при плавании в глубоководных районах приходится использовать относительный лаг.
Для того чтобы показания лагов обладали необходимой (заданной) точностью, абсолютные и относительные лаги должны быть откалиброваны на мерной линии.
Способы калибровки лагов на мерной линии хорошо известны [1-5].
На сегодняшний день калибровка лагов как надводных кораблей и судов, так и подводных лодок осуществляется на специально оборудованных мерных линиях, количество которых в стране ограничено. Располагаются они в непосредственной близости от крупных судостроительных предприятий.
Мерная линия включает (фиг.1) линию пробега 1 и два секущих створа 2, оборудованных на концах хорошо различимыми ориентирами, например, буями 3. Длина отрезка  линии пробега, располагающегося между секущими створами, называется мерной длиной. Линия пробега располагается параллельно течению. Секущие створы перпендикулярны линии пробега. На линии каждого секущего створа на плавсредстве либо на берегу располагается человек-наблюдатель 4, готовый при пересечении судном секущего створа зафиксировать момент времени пересечения и сообщить его на пункт управления (ПУ), находящейся на берегу либо на судне. Секундомеры наблюдателей и секундомеры на ПУ должны быть синхронизированы с точностью до 1 с.
линии пробега, располагающегося между секущими створами, называется мерной длиной. Линия пробега располагается параллельно течению. Секущие створы перпендикулярны линии пробега. На линии каждого секущего створа на плавсредстве либо на берегу располагается человек-наблюдатель 4, готовый при пересечении судном секущего створа зафиксировать момент времени пересечения и сообщить его на пункт управления (ПУ), находящейся на берегу либо на судне. Секундомеры наблюдателей и секундомеры на ПУ должны быть синхронизированы с точностью до 1 с.
Судно с калибруемым лагом движется с постоянными курсом и скоростью вдоль линии пробега. Моменты пересечения первого  и второго
и второго  секущих створов фиксируются наблюдателями. Далее определяется фактическая скорость
секущих створов фиксируются наблюдателями. Далее определяется фактическая скорость  прохождения мерной длины на первом галсе:
прохождения мерной длины на первом галсе:
 (1)
(1)
Для компенсации влияния течения судно проходит мерную линию в обратном направлении с определением фактической скорости  . Среднее арифметическое из и является фактической скоростью судна, которая используется для вычисления поправки лага.
. Среднее арифметическое из и является фактической скоростью судна, которая используется для вычисления поправки лага.
Достоинством описанного способа является простота калибровки лагов, установленных на надводных судах.
Вместе с тем этот способ имеет существенный недостаток при калибровке лагов, установленных на подводных лодках и ПА, для которых основным положением при плавании является подводное. Дело в том, что описанный способ предусматривает прохождение судном мерной линии принципиально в надводном положении, ввиду чего в случае подводных лодок и ПА корректно откалибровать лаги не удаётся, поскольку при их движении в надводном положении в измерение фактической скорости вносятся дополнительные неустранимые ошибки, связанные с рысканьем на волне и отличием динамического сопротивления воды в подводном и надводном положениях ПА.
Известен способ калибровки лагов, установленных на подводных лодках, при их движении в подводном положении [1, 7], отличающийся тем, что секущие створы заменяются секущими подводными кабелями под электрическим напряжением. Момент прохождения подводной лодки в подводном положении над секущим кабелем определяется специальной аппаратурой, установленной на подводной лодке. Однако в силу сложности и высокой стоимости реализации (в силу необходимости специального оборудования подводных лодок) данный способ практического применения не нашёл.
Также известен способ [8], позволяющий калибровать лаги подводных лодок и ПА при их движении в подводном положении. Способ состоит в оборудовании секущих створов донными маяками-ответчиками (ДМО), позволяющими определять расстояние между судном и ДМО. Реализуется это следующим образом. ПА периодически посылает на ДМО гидроакустический сигнал запроса. ДМО, получив его, с известной задержкой посылает гидроакустический ответный сигнал. На ПА, получив ответный сигнал, по разности времён получения ответного сигнала и излучения сигнала запроса (за вычетом известной задержки излучения на ДМО ответного сигнала) и известной скорости звука в воде определяют расстояние между ПА и ДМО. В результате моменту времени пересечения секущего створа соответствует минимальное расстояние между ПА и ДМО.
Однако данный способ не нашёл практического применения ввиду сложности его реализации, состоящей в сложности определения точного расстояния между ДМО, установленными на разных секущих створах, необходимости контролировать скорость звука в местах установки ДМО, необходимости периодически поднимать ДМО на поверхность для перезарядки аккумуляторных батарей.
В качестве способа-прототипа выберем широко используемый на практике способ калибровки лага на мерной линии, подробно описанный в [1, с.195]. Оборудование мерной линии описано выше.
Калибровка лага согласно способу-прототипу включает следующие действия:
Судно, на котором установлен калибруемый лаг (абсолютный либо относительный) в надводном положении с заданной постоянной скоростью  начинает движение вдоль линии пробега извне мерной длины, приближаясь к ближайшему секущему створу.
начинает движение вдоль линии пробега извне мерной длины, приближаясь к ближайшему секущему створу.
В момент пересечения первого секущего створа располагающийся на нём человек-наблюдатель фиксирует точное время пересечения  и одним из способов сообщает его на ПУ.
и одним из способов сообщает его на ПУ.
В момент пересечения второго секущего створа располагающийся на нём человек-наблюдатель фиксирует точное время пересечения  и одним из способов сообщает его на ПУ.
и одним из способов сообщает его на ПУ.
На ПУ по формуле (1) определяют фактическую скорость прохождения мерной длины на первом галсе.
Для компенсации скорости течения действия по пп.1-4 повторяют при движении судна в обратном направлении, в результате на ПУ определяют фактическую скорость  прохождения мерной длины на втором (обратном) галсе.
прохождения мерной длины на втором (обратном) галсе.
На ПУ определяют поправку лага  , соответствующую скорости , которая затем вводится в вычислительное устройство лага:
, соответствующую скорости , которая затем вводится в вычислительное устройство лага:
 (2)
(2)
Действия по пп.1-6 повторяют для набора скоростей из диапазона возможных скоростей судна.
Достоинством способа-прототипа является простота калибровки лагов, установленных на надводных судах.
Вместе с тем, как замечено выше, способ-прототип имеет существенный недостаток при калибровке лагов, установленных на ПА, для которых основным положением при плавании является подводное.
Также недостатком способа-прототипа в случае калибровки лагов, установленных на ПА, является то, что калибровка проводится на специально оборудованных мерных линиях, которые имеются только в местах расположения крупных судостроительных заводов. ПА, как правило, изготавливаются на небольших предприятиях и доставка их для проведения калибровки лагов на оборудованные мерные линии сопряжена с существенными финансовыми затратами.
Решаемая техническая проблема – совершенствование способов калибровки лагов, установленных на ПА.
Технический результат – обеспечение заданной точности калибровки лагов, установленных на ПА, при их движении под водой.
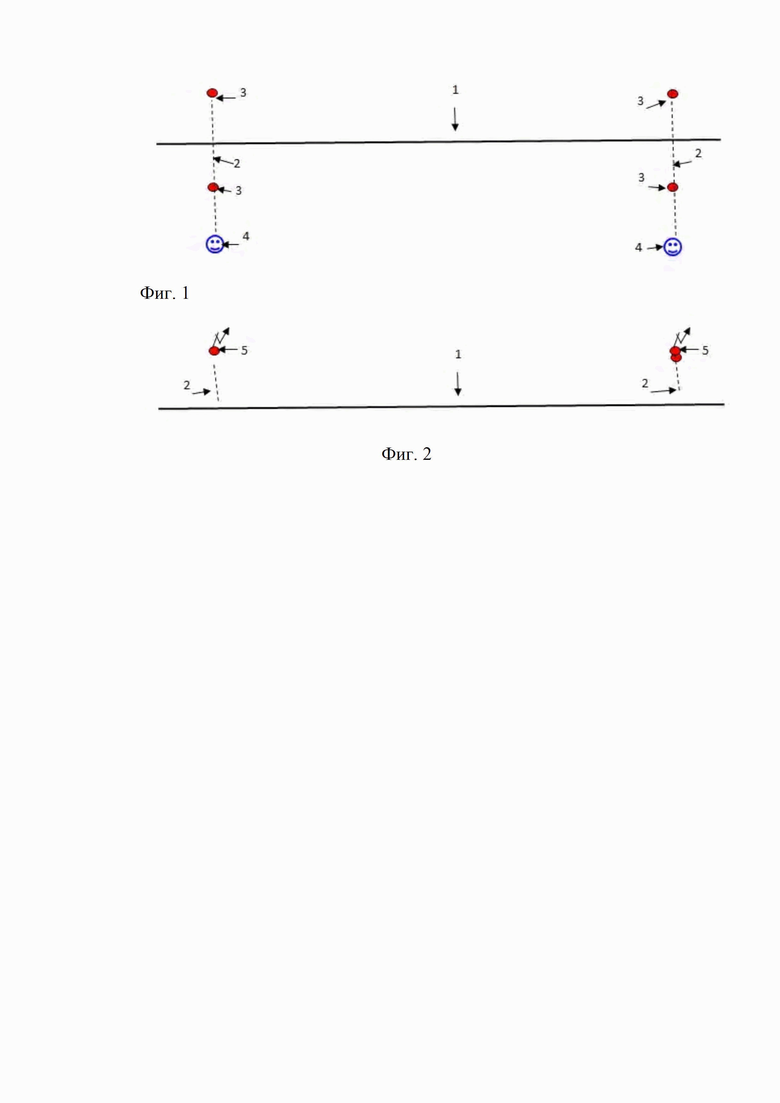
Указанный технический результат достигается тем, что секущие створы, вместо визуально хорошо различимых буёв, оборудуются радиогидроакустическими буями (фиг. 2, поз. 5, по одному на каждый створ) с направленными гидроакустическими антеннами. Направленная гидроакустическая антенна радиогидроакустического буя (РГБ) позволяет определять текущий пеленг ПА и по максимуму скорости его изменения (который соответствует кратчайшему расстоянию между ПА и РГБ) фиксировать момент прохождения ПА секущего створа. Наиболее точно момент прохождения ПА секущего створа фиксируется по равенству нулю второй производной изменения пеленга ПА во времени.
Сущность предлагаемого изобретения заключается в следующем:
1) ПА в подводном положении с постоянной заданной скоростью начинает движение вдоль линии пробега извне мерной длины, приближаясь к ближайшему секущему створу.
2) В вычислительном устройстве каждого РГБ периодически с периодом в единицы секунд измеряются и запоминаются привязанные ко времени  пеленги ПА
пеленги ПА  . Если вследствие низкой шумности ПА его пеленгование РГБ на протяжении всего маршрута не представляется возможным, ПА периодически с периодом в единицы секунд излучает сигналы гидролокатором, по которым РГБ осуществляют пеленгование ПА.
. Если вследствие низкой шумности ПА его пеленгование РГБ на протяжении всего маршрута не представляется возможным, ПА периодически с периодом в единицы секунд излучает сигналы гидролокатором, по которым РГБ осуществляют пеленгование ПА.
3) В вычислительном устройстве каждого РГБ с использованием массива измеренных пеленгов , привязанных ко времени , вычисляется текущее значение второй производной  изменения пеленга ПА во времени.
изменения пеленга ПА во времени.
4) В вычислительном устройстве каждого  -го РГБ с использованием зависимости второй производной изменения пеленга фиксируется момент времени
-го РГБ с использованием зависимости второй производной изменения пеленга фиксируется момент времени  равенства второй производной нулю, который соответствует моменту пересечения ПА секущего створа. Этот момент времени по радиосвязи либо путём считывания из памяти вычислительного устройства после завершения работы передаётся на ПУ.
равенства второй производной нулю, который соответствует моменту пересечения ПА секущего створа. Этот момент времени по радиосвязи либо путём считывания из памяти вычислительного устройства после завершения работы передаётся на ПУ.
5) На ПУ определяют фактическую скорость  прохождения мерной длины на первом галсе:
прохождения мерной длины на первом галсе:
 (3)
(3)
где  – расстояние между РГБ.
– расстояние между РГБ.
6) Для компенсации влияния течения действия по пп.1-5 повторяют при движении ПА в обратном направлении, в результате на ПУ определяют фактическую скорость  прохождения мерной длины на втором (обратном) галсе.
прохождения мерной длины на втором (обратном) галсе.
7) На ПУ по формуле (2) определяют и вносят в вычислительное устройство лага поправку лага , соответствующую скорости :
8) Действия по пп.1-7 повторяют для набора скоростей из диапазона возможных скоростей ПА.
Отличительными признаками заявляемого способа являются:
1) Движение ПА вдоль линии пробега в подводном положении. ?
2) Измерение моментов времени пересечения секущих створов по равенству нулю вторых производных изменения пеленгов, измеряемых РГБ с направленными гидроакустическими антеннами.
Определим точность измерения скорости ПА по формуле (3) предложенным способом.
Поскольку относительные среднеквадратические погрешности (СКП) оценки расстояния между РГБ и разности времён  малы, то согласно [9]
малы, то согласно [9]
 (4)
(4)
где 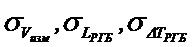 – СКП, соответственно, оценки скорости ПА, оценки расстояния между РГБ и оценки разности времени пересечения секущих створов.
– СКП, соответственно, оценки скорости ПА, оценки расстояния между РГБ и оценки разности времени пересечения секущих створов.
Из (4) следует
 (5)
(5)
Согласно [10] с применением дифференциальной спутниковой навигационной системы местоположение РГБ можно определить со СКП 3 см, следовательно расстояние между РГБ можно определить с СКП  =5 см.
=5 см.
Проведённый эксперимент показал, что разность времён пересечения секущих створов по пеленгам определяется со СКП  <5с.
<5с.
В результате при типовом расстоянии между РГБ =1000 м и скорости ПА 2 м/с относительная СКП измерения скорости ПА  не превышает 1%, что соответствует точности, предъявляемой к лагам.
не превышает 1%, что соответствует точности, предъявляемой к лагам.
Таким образом, можно утверждать, что заявляемый технический результат достигнут.
Источники информации:
1. Виноградов К.А., Кошкарев В.Н., Осюхин Б.А., Хребтов А.А., Абсолютные и относительные лаги // Л.: Судостроение, 1990.
2. Хребтов А.А., Виноградов К.А., Кошкарев В.Н. и др. Судовые измерители скорости. // Л.: Судостроение, 1978.
3. Гидроакустические навигационные средства. Под ред. В.В. Богородского // Л.: Судостроение, 1983. 262 с.
4. Богородский В.В., Гидроакустическая техника исследования и освоения океана // Л.: Гидрометиздат, 1984.
5. Виноградов К.А., Новиков И.А., Гидроакустические навигационные системы и средства // Навигация и гидрография, ГНИНГИ МО РФ, № 7, 1999.
6. Каманин А.В., Лаврентьев А.В., Скубко Р.А. Штурман флота. Справочник по кораблевождению. М.: Воениздат, 1986.
7. Патент РФ №2259572.
8. Виноградов К.А. и др. Гидроакустическая траверзная мерная линия // Сборник докладов 4-й Российской научно-технической конференции "Современное состояние, проблемы навигации и океанографии". 2001. Том 2. С.18-20.
9. Вентцель Е.С., Овчаров Л.А. Теория вероятностей и её инженерные приложения. // М.: Наука, 1988, с.273.
10. en/wikipedia.org
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения шумности подводного аппарата | 2023 |
|
RU2801077C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПРИ КАЛИБРОВКЕ ЛАГОВ НА ГИДРОАКУСТИЧЕСКОЙ ТРАВЕРЗНОЙ МЕРНОЙ ЛИНИИ | 2003 |
|
RU2259572C2 |
| Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации | 2024 |
|
RU2830066C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ ПОПЕРЕЧНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ СУДНА ПРИ КАЛИБРОВКЕ ЛАГОВ НА ВИЗУАЛЬНОЙ ТРАВЕРЗНОЙ МЕРНОЙ ЛИНИИ С ТЕОДОЛИТНЫМИ ПОСТАМИ | 2007 |
|
RU2334997C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
| СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2013 |
|
RU2551834C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И КОНТРОЛЯ В НЕМ АКУСТИЧЕСКИХ ОБЪЕКТОВ | 2023 |
|
RU2806775C1 |
| Способ обсервации подводного аппарата | 2021 |
|
RU2763114C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2681476C2 |
Изобретение относится к области навигации, а именно к способам и устройствам измерения скорости обитаемых и необитаемых подводных аппаратов (ПА). Технический результат – обеспечение заданной точности калибровки лагов, установленных на ПА, при их движении под водой. Технический результат достигается тем, что секущие створы на мерной линии вместо визуально хорошо различимых буёв оборудуются радиогидроакустическими буями с направленными гидроакустическими антеннами, что позволяет пеленговать ПА при его движении под водой и по равенству нулю второй производной пеленга фиксировать момент пересечения подводным аппаратом секущего створа. 2 ил.
Способ калибровки лага, установленного на подводном аппарате (ПА), включающий движение ПА с заданной постоянной скоростью вдоль линии пробега мерной линии, фиксацию времени пересечения первого секущего створа, фиксацию времени пересечения второго секущего створа, определение фактической скорости движения ПА путём деления мерной длины на разность времён пересечения секущих створов, повторение определения фактической скорости при движении ПА с той же скоростью вдоль линии пробега в противоположном направлении, определение поправки лага путём вычитания заданной скорости из среднего значения фактической скорости при движении ПА вдоль линии пробега в обоих направлениях, повторение определения поправки лага для других заданных скоростей ПА из диапазона возможных скоростей ПА, отличающийся тем, что ПА вдоль линии пробега движется в подводном положении, первый и второй секущие створы реализуют с использованием первого и второго радиогидроакустических буёв с направленными гидроакустическими антеннами, периодически измеряющих и запоминающих с привязкой ко времени пеленги ПА при движении ПА вдоль линии пробега, моменты пересечения первого и второго секущего створа определяют по равенству нулю второй производной изменения пеленга во времени.
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПРИ КАЛИБРОВКЕ ЛАГОВ НА ГИДРОАКУСТИЧЕСКОЙ ТРАВЕРЗНОЙ МЕРНОЙ ЛИНИИ | 2003 |
|
RU2259572C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2691212C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599902C1 |
| CN 110646783 A, 03.01.2020 | |||
| US 4446538 A1, 01.05.1984 | |||
| US 6097670 A1, 01.08.2000. | |||
