1
Изобретение относится к области судовождения, а именно к определению поправки лага, и может быть использовано для определения поправки лага в открытом море.
Известен способ определения поправки лага по радиолокационным расстояниям до объекта, например буя или вехи с радиолокационным отражателем Г. Способ за ключается в следующем. Следуя от объек- та или к нему, на судне с помощью радиолокационной станции РЛС измеряют два расстояния до объекта и одновременно снимают отсчеты лага. Сравнивая разности радиолокационных расстояний с расстояние пройденным по лагу .определяют поправку лага.
Недостатком способа является потребность в специально оборудованной вехе и затраты времени на маневрирование, а также на спуск и поднятие вехи. Кроме того, дальность радиолокационного обнаружения вехи незначительна, что сильно снижает точность определения поправки лага.
Цель изобретения - одновременная тарировка для двух лагов судов, следующих пересекающимися курасами.
Эта цель достигается тем, что одновременно измеряют расстояние и фиксируют время прохождения этого расстояния от одного судна до другого в моменты пересечения курса следования одного судна другим.
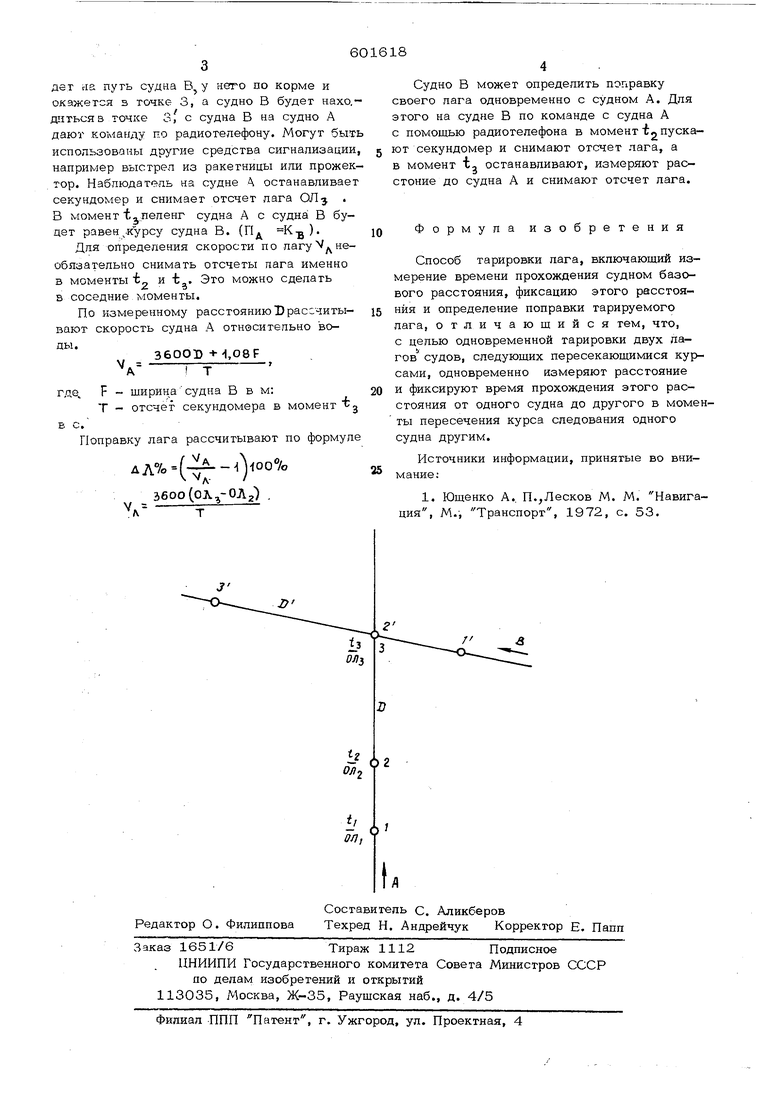
На чертеже изобрежен пример реализации предлагаемого способа.
Суда А и В следуют пересекающимися курсами и имеют связь по радиотелефону. В момент t суда А и В находятся в точках 1 и l и договариваются о проведении наблюдений. В момент 2 суда А и В находятся в точках 2 и 2 . Судно В пересекает курс судна А. В момент пересечения на судне А пускают секундомер, с помощью РЛС измеряют расстояние до судна В и снимают отсчет лага ОЛ В момент пересечения пеленг судна В должен быть равен курсу судна Adlg K. ). После этого суда продолжают следовать своим курсами. В момент t,, когда судно А ria путь судна В, у него по корме и окажется в точке 3, а судно В будет нахо,дитьсяв точке of с судна В на судно А дают команду по радиотелефону. Могут быть использованы другие средства сигнализации, например выстрел из ракетницы или прожектор. Наблюдатель на судне А останавливает секундомер и снимает отсчет лага ОЛ . В момент tJ:Пeлeнг судна А с судна В будет равен курсу судна В. (Пд K-g).
Для определения скорости по лагу /днеобязательно снимать отсчеты лага именно
Это можно сделать
в моменты
3
в соседние моменты.
По измеренному расстоянию)рассчитывают скорость судна А относительно во ЗбООБ ,08F
А- ГТ-
Рде F - ширин асудна В Б м:
Т - отсчет секундомера в момент 3
в с.
Поправку лага рассчитывают по формуле
J:IA.A
ioo%
ДЛ%
v.. У
ЗбОоСОА -ОЛг}
Т
Судно В может определить погфавку своего лага одновременно с судном А. Для этого на судне В по команде с судна А с помощью радиотелефона в момент 2пускают секундомер и снимают отсчет лага, а в момент tj останавливают, измеряют раостоние до судна А и снимают отсчет лага.
Формула изобретения
Способ тарировки лага, включающий измерение времени прохождения судном базового расстояния, фиксацию этого расстояния и определение поправки тарируемого лага, отличающийся тем, что, с целью одновременной тарировки двух лагов судов, следующих пересекающимися курсами, одновременно измеряют расстояние и фиксируют время прохождения этого расстояния от одного судна до другого в момен ты пересечения курса следования одного судна другим.
Источники информации, принятые во внимание;
1. Ющенко А.. П.,Лесков М. М. Навигация, М., Транспорт, 1972, с. 53.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения скоростных характеристик морских течений с судна | 1982 |
|
SU1040420A1 |
| Способ тарировки лага | 1988 |
|
SU1642405A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ ПОПЕРЕЧНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ СУДНА ПРИ КАЛИБРОВКЕ ЛАГОВ НА ВИЗУАЛЬНОЙ ТРАВЕРЗНОЙ МЕРНОЙ ЛИНИИ С ТЕОДОЛИТНЫМИ ПОСТАМИ | 2007 |
|
RU2334997C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА ПО ТРЕМ РАССТОЯНИЯМ | 2007 |
|
RU2353947C1 |
| Способ калибровки лага, установленного на подводном аппарате | 2023 |
|
RU2800186C1 |
| Способ определения поправки компаса | 1974 |
|
SU522412A1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2005 |
|
RU2281529C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Способ автоматического обнаружения источника непрерывного излучения одноканальными радиолокационными станциями беспилотных воздушных судов | 2023 |
|
RU2820577C1 |
Г
