У
ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения двигателя внутреннего сгорания | 1988 |
|
SU1574877A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1986 |
|
SU1408095A1 |
| Система управления для двигателя внутреннего сгорания с наддувом | 1988 |
|
SU1643762A1 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1988 |
|
SU1576705A2 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2366070C1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1985 |
|
SU1271988A1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2400918C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
Изобретение относится к измерительной технике. Целью изобретения является повышение точности определения момента нагрузки путем одновременного вычисления приведенного «с валу двигателя момента инерции нагрузки. В блоке оценивания, не содержащем дифференцирующих звеньев и обладающем повышенной помехоустойчивостью, производится оценка приведенного момента инерции, используемого в блоке вычисления момента нагрузки, что позволяет устранить погрешность определения момента нагрузки, обусловленную изменением приведенного момента инерции нагрузки 1 ил.
Изобретение относится к измерительной технике, в частности к устройствам для измерения момента нагрузки двигателей, и может быть использовано при испытаниях двигателей внутреннего сгорания (ДВС).
Цель изобретения - повышение точности определения момента нагрузки.
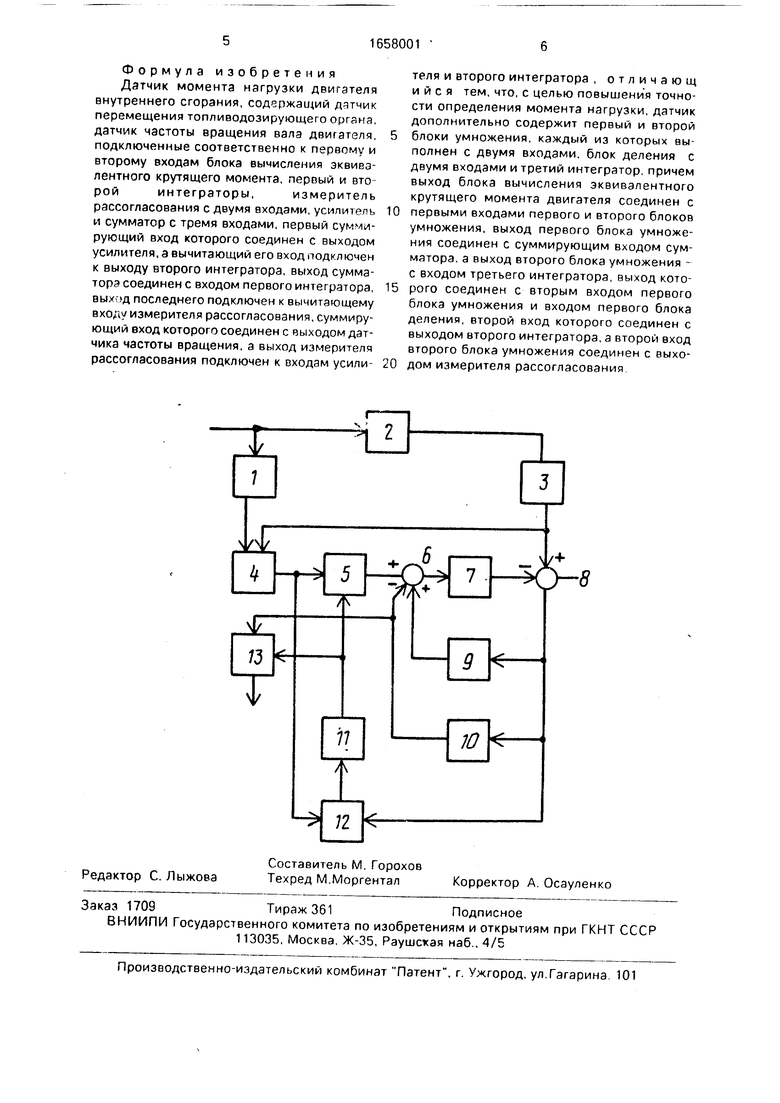
На чертеже представлена структурная функциональная схема датчика момента нагрузки.
Датчик момента нагрузки содержит датчик 1 перемещения топливодозирующего органа двигателя 2, датчик 3 частоты вращения двигателя, блок 4 вычисления эквивалентного крутящего момента двигателя, первый блок 5 умножения, сумматор 6 с тремя входами, первый интегратор 7, измеритель 8 рассогласования, усилитель 9 с коэффициентом передачи (к.п.) а , второй интегратор 10 с к.п. fi , третий интегратор
11 с к.п у блок 12 умножения, блок 13 деления
Датчик 1 перемещения топливодозирующего органа двигателя 2 подключен к первому входу блока 4. к второму подключен датчик 3 частоты вращения. Выход блока 4 соединен с первыми входами блоков 5 и 12. выход блока 5 подключен к первому суммирующему шкоду сумматора 6, выход которого соединен с выходом первого интегратора 7. Выход интегратора 7 подключен к вычитающему входу измерителя 8 рассогласования, суммирующий вход которого подключен к выходу датчика 3 частоты вращения. Выходы усилителя 9 второго интегратора 10 и второй вход блока 12 подключены к выходу измерителя 8 рассогласования. Выходы усилителя 9 и интегратора 10 подключены соответственно к второму суммирующему и вычитающему входам сума ел
00
матора 6. Выход второго блока 12 подключен к входу третьего интегратора 11, выход которого подключен к втоому входу блока 5 и первому входу блока 13. Второй вход блока 13 соединен с выходом интегратора 10.
Датчик работает следующим образом.
В процессе функционирования транс- портно-технологической машины с ДВС изменение момента инерции нагрузки, приводит к большим погрешностям в определении момента нагрузки на валу двигателя. За счет использования блоков 5 и 12 умножения интегратора 11 и блока 13 деления в блок оценивания момента нагрузки вводится связь по оценке момента инерции, которая устраняет погрешность определения момента нагрузки Ml((t), вызванную изменением приведенного к валу двигателя момента инерции l(t).
Уравнение двигателя представлено в виде
u(t) r1(t) МЭк(г1, ш)-Мн(х), (1) где Мэк(Ь, а) МЯв(Н , со ) - Мс( со),
МдВ(Ь,со) - крутящий момент двигателя;
Мс( со) - составляющая момента сопротивления, зависящая от частоты вращения вала двигателя;
MH(t) - составляющая момента сопро- тиаления, независящая от частоты вращения и являющаяся заранее неизвестной функцией времени, в дальнейшем определяется как момент нагрузки;
h -- перемещение гопливо-дозирующего органа;
ш - частота вращения коленчатого вала двигателя (к в д.);
I - приведенный к валу двигателя момент инерции.
Уравнение модели двигателя, используемое для оценки, вид Ай-РМэк й)) MH(t)4
а ( а) - ш), (2) где I - сигнал оценки момента инерции;
со - сигнал оценки частоты вращения к.в.д.
В уравнении (2)две первые составляющие правой части подобны правой части уравнения двигателя, а составляющая а( со-ей) вводится специально для получения требуемой динамики процесса оценивания. Введя обозначения mH(t) (t) MH(t), mn(t) (t)MH(t), .t} w(t)- ш (t),
где Ј(t) коэффициентное рассогласование, получим дифференциальное уравнение для координат, ошибки
d(t)())M9K{h, w )-(тнЮ-тч«} du).i3) Алгоритм оценивания момента инерции, приведенного к валу двигателя l(t), и момента нафузки на валу двигателя MH(t),
реализуемый вустройстве, синтезирован на основе прямого метода Ляпунова. Для этого используется функция Ляпунова следующего вида;
V l(- + -2У
+ (тн(0-йн(0)2
где у 0 , ft 0 . Очевидно V 0.
Полная производная функция Ляпунова по времени имеет вид
(r1()(t))x(i-l(t)) 1( t ) 4- i ( тч ( t ) - п,н ( t ) )UH t t ) тн ( О I
(5)
Решение уравнения (5) обеспечивается
путем выделения составляющих, содержащих (Г1) - Г (t))n (mH(t) - mH(t) в группы и приравнивания каждой группы членов к нулю, решение уравнения (5) имеет вид (t) У Мэк(Ь, ш )xftt).(G)
)/J Kt).(7)
MH(t) mH(t)xr(t).(8)
Решение уравнений (5) - (8) обеспечивается отдельными элементами, входящими в состав датчика.
При этом вычисление величины Мзк (h, ш ) реализовано о блока 5, входными сигналами которого являются сигналы от датчиков 1 и 3. Выходной сигнал а) интегратора 7 является выходом математической модели двигателя. В сумматоре 8 по сигналам от датчика 3 и интегратора 7 определяется неличина е координатной ошибки.
Д 1
Вычисление обратной величины I приведенного момента инерции производится по сигналу е с выхода сумматора 8 и сигналу Мак с выхода блока 5 с помощью блока 12 и интегратора 11.л
Вычисление параметра Мн оценки на; руски двигателя осуществляется в блоке 13 по сигналу от интегратора 11 и сижалу с выхода интегратора 10, на вход которого поступает сигнал е.
Изменение динамических характеристик датчика в целом осуществляют путем подбора к.п. усилителя 9 и интеграторов 10 и 11.
Таким образом, наличие двух бпоког. умножения, третьего интегратора и блока делзния, а также реализация алгоритма оценивания в устройстве обеспечивают возможность определения момента нагрузки на палу двигателя и приведенного момента
С ВЫСОКОЙ ПЧНОСТЬЮ. .
Формула изобретения Датчик момента нагрузки двигателя внутреннего сгорания, содержащий дчтчик перемещения топливодозирующего органа, датчик частоты вращения вала двигателя, подключенные соответственно к первому и второму входам блока вычисления эквивалентного крутящего момента, первый и второйинтеграторы,измеритель рассогласования с двумя входами, усилитель и сумматор с тремя входами, первый суммирующий вход которого соединен с выходом усилителя, а вычитающий его вход подключен к выходу второго интегратора, выход сумматора соединен с входом первого интегратора, вых д последнего подключен к вычитающему входу измерителя рассогласования, суммирующий вход которого соединен с выходом датчика частоты вращения, а выход измерителя рассогласования подключен к входам усили-
теля и второго интегратора , отличающ и и с я тем, что, с целью повышения точности определения момента нагрузки, датчик дополнительно содержит первый и второй блоки умножения, каждый из которых выполнен с двумя входами, блок деления с двумя входами и третий интегратор, причем выход блока вычисления эквивалентного крутящего момента двигателя соединен с первыми входами первого и второго блоков умножения, выход первого блока умножения соединен с суммирующим входом сумматора, а выход второго блока умножения - с входом третьего интегратора, выход которого соединен с вторым входом первого блока умножения и входом первого блока деления, второй вход которого соединен с выходом второго интегратора, а второй вход второго блока умножения соединен с выходом измерителя рассогласования
| Регулятор частоты вращения двигателя внутреннего сгорания | 1987 |
|
SU1574876A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
