1
п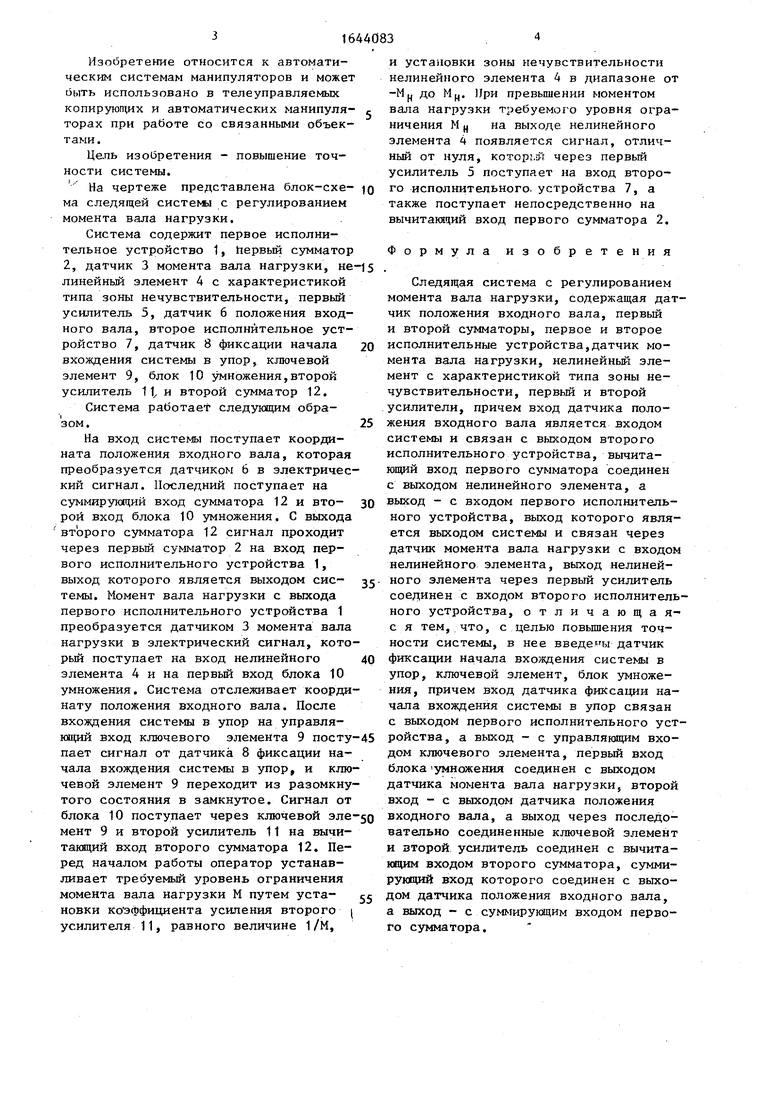
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система с отражением усилия | 1987 |
|
SU1531070A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147985C1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2001 |
|
RU2209718C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КРАНОМ-РЕГУЛЯТОРОМ | 2007 |
|
RU2382392C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
Изобретение относится к автоматическим системам манипуляторов и может быть использовано в телеуправляемых копирующих и автоматических манипуляторах при работе со связанными объектами. Цель изобретения - повышение точности системы. Система содержит первое исполнительное устройство 1, первый сумматор 2, датчик 3 момента вала нагрузки, нелинейный элемент 4 с характеристикой типа зоны нечувствительности, первый усилитель 5, датчик 6 положения входного вала, второе исполнительное устройство 7, датчик 8 фиксации начала вхождения системы в упор, ключевой элемент 9, блок умножения 10, второй усилитель 11, второй сумматор 12. 1 ил.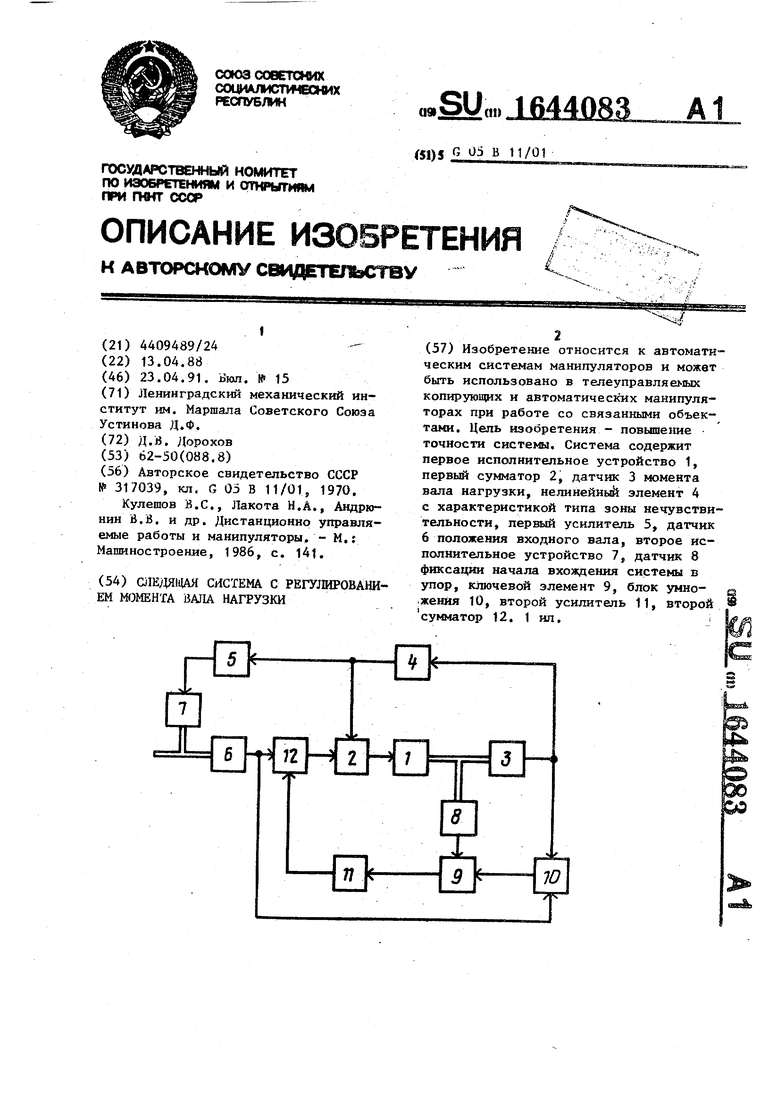
в
&0
л
10
Изобретение относится к автоматическим системам манипуляторов и может быть использовано в телеуправляемых копирующих и автоматических манипуля- торах при работе со связанными объектами .
Цепь изобретения - повышение точности системы.
На чертеже представлена блок-схе- ма следящей системы с регулированием момента вала нагрузки.
Система содержит первое исполнительное устройство 1, первый сумматор 2, датчик 3 момента вала нагрузки, нелинейный элемент 4 с характеристикой типа зоны нечувствительности, первый усилитель 5, датчик 6 положения входного вала, второе исполнительное устройство 7, датчик 8 фиксации начала вхождения системы в упор, ключевой элемент 9, блок 10 умножения,второй усилитель 1 и второй сумматор 12.
Система работает следующим образом.
На вход системы поступает координата положения входного вала, которая преобразуется датчиком 6 в электрический сигнал. Последний поступает на суммирующий вход сумматора 12 и вто- рой вход блока 10 умножения. С выхода второго сумматора 12 сигнал проходит через первый сумматор 2 на вход первого исполнительного устройства 1, выход которого является выходом сие- темы. Момент вала нагрузки с выхода первого исполнительного устройства 1 преобразуется датчиком 3 момента вала нагрузки в электрический сигнал, который поступает на вход нелинейного элемента 4 и на первый вход блока 10 умножения. Система отслеживает координату положения входного вала. После вхождения системы в упор на управляющий вход ключевого элемента 9 поступает сигнал от датчика 8 фиксации начала вхождения системы в упор, и ключевой элемент 9 переходит из разомкнутого состояния в замкнутое. Сигнал от блока 10 поступает через ключевой эле мент 9 и второй усилитель 11 на вычитающий вход второго сумматора 12. Перед началом работы оператор устанавливает требуемый уровень ограничения момента вала нагрузки М путем уста- новки коэффициента усиления второго j усилителя 11, равного величине 1/М,
и установки зоны нечувствительности нелинейного элемента 4 в диапазоне от -Мн до Мн. При превышении моментом вала нагрузки требуемого уровня ограничения М н на выходе нелинейного элемента 4 появляется сигнал, отличный от нуля, которг.й через первый усилитель 5 поступает на вход второго исполнительного, устройства 7, а также поступает непосредственно на вычитающий вход первого сумматора 2.
Формула изобретения
Следящая система с регулированием момента вала нагрузки, содержащая датчик положения входного вала, первый и второй сумматоры, первое и второе исполнительные устройства,датчик момента вала нагрузки, нелинейный элемент с характеристикой типа зоны нечувствительности, первый и второй усилители, причем вход датчика положения входного вала является входом системы и связан с выходом второго исполнительного устройства, вычитающий вход первого сумматора соединен с выходом нелинейного элемента, а выход - с входом первого исполнительного устройства, выход которого является выходом системы и связан через датчик момента вала нагрузки с входом нелинейного элемента, выход нелинейного элемента через первый усилитель соединен с входом второго исполнительного устройства, отличающа я- с я тем, что, с целью повышения точности системы, в нее введены датчик фиксации начала вхождения системы в упор, ключевой элемент, блок умножения, причем вход датчика фиксации начала вхождения системы в упор связан с выходом первого исполнительного устройства, а выход - с управляющим входом ключевого элемента, первый вход блока умножения соединен с выходом датчика момента вала нагрузки, второй вход - с выходом датчика положения входного вала, а выход через последовательно соединенные ключевой элемент и второй усилитель соединен с вычитающим входом второго сумматора, суммирующий вход которого соединен с выходом датчика положения входного вала, а выход - с суммирующим входом первого сумматора.
| СЛЕДЯЩАЯ СИСТЕМА С ОТРАЖЕНИЕМ УСИЛИЯ | 0 |
|
SU317039A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кулешов B.C., Лако та Н.А., Андрю- нин В.В | |||
| и др | |||
| Дистанционно управляемые работы и манипуляторы, - М.: Машиностроение, 1986, с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
