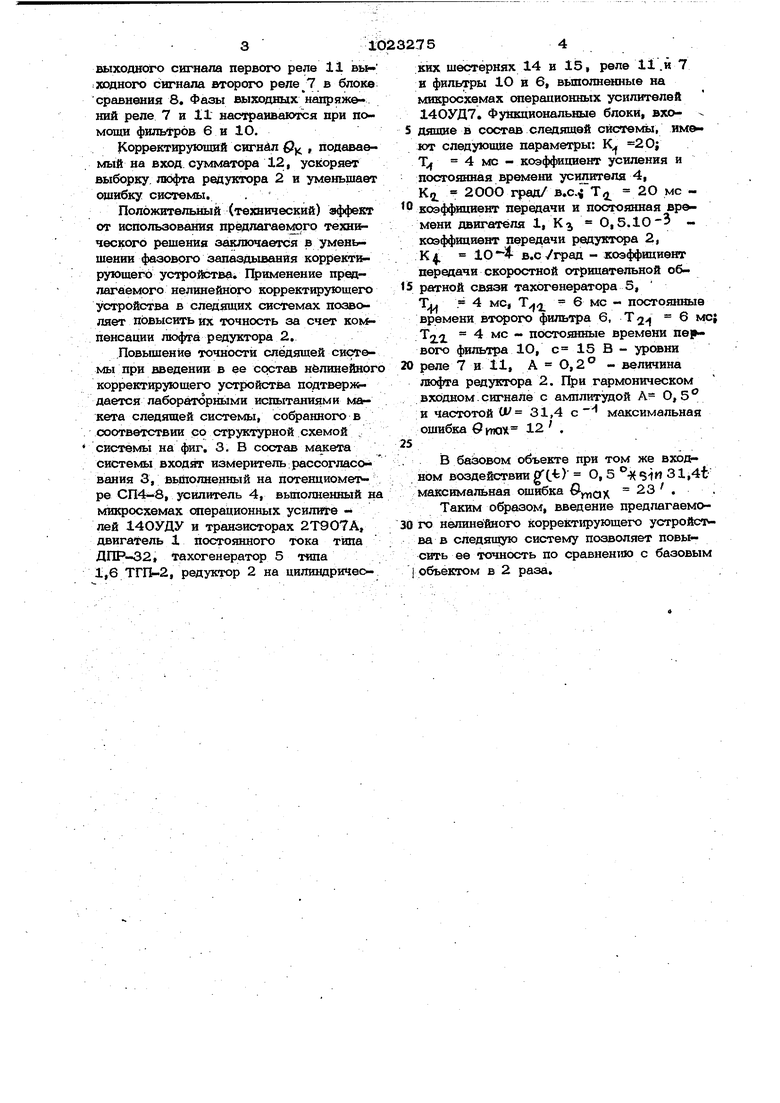
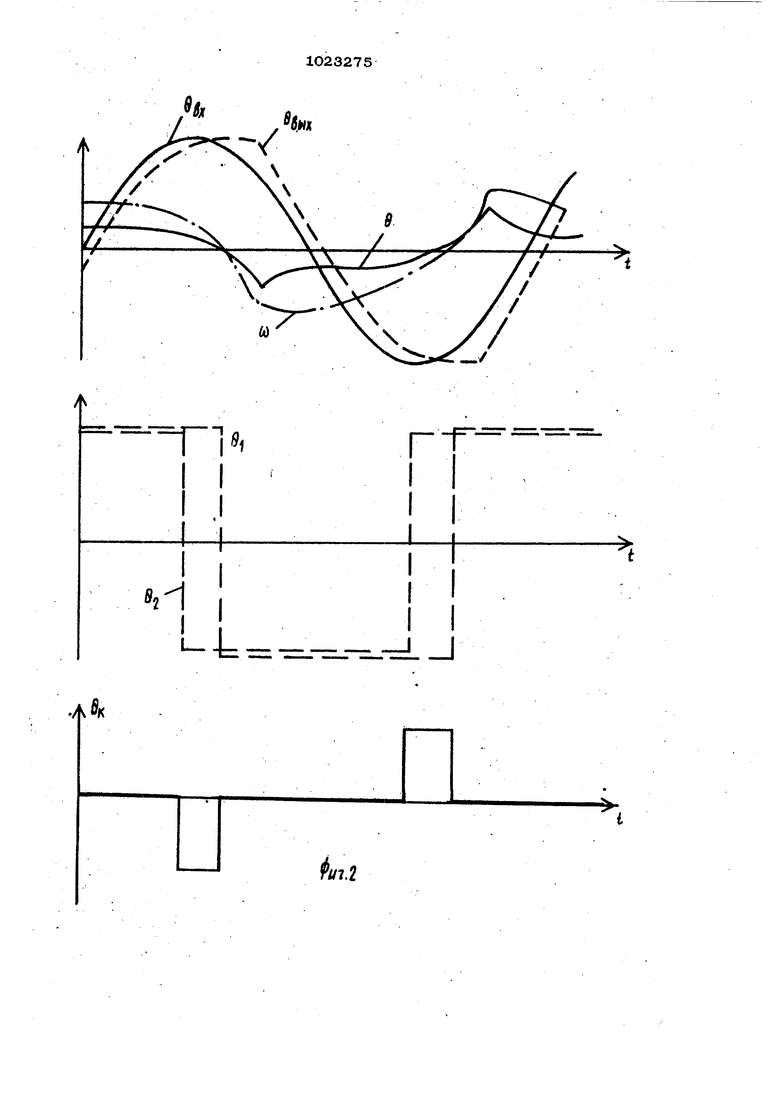
Изобретение относится к устройствам нелинейной коррекции и может быть применено для колшенсации люфта мезсанической передачи в системах автоматичео кого управления летательными аппарата.ми, кораблями и техническими процессами.. Известно нелинейное корректирующее устройство, содержащее лоследователь но соединенные первый фильтр, первый блок выделения модуля, блок сравнения, реле и блок умножения, подключенрый вторым входом к выходу первого фильт р и второй фильтр, выходом через второй блок выделения модуля подключенный к второму входу блока сравнения Известно.нелинейное корректирующее устройство, содержащее последовательно соединенные первый фильтр, первое реле, первый блок умножения, второе реле второй блок умножения и сумматор, вторым входом подключенный к входу первог фильтра и входу второго фильтра ,выходом подключенного к второму входу второго сумматора через последовательно соединенные третий фильтр и третье реле - к второму входу первого блока укпюжения и первому входу третьего блока умножения, вторым входом через четвертое реле подключенного к выходу второго фильтра, да выходом - к третье му входу второго блока умножения , Недостаток известных устройств большое фа.зовое запаздывание. Наиболее близким к предлагаемому по технической сущности является нелинейное корректирующее устройство, содержащее последовательно соединенные первый фильтр, первое реле, блок сравнения, третье реле, блок умножения и сумматор, входом через блок выделения модуля подключенный к входу первого фильтра, а выходом - к первому входу второго блока умножения,вторым входом подключенный к второму входу блока сра нения и выходу второго реле, входом через ягорой фильтр подключенный к входу первого фильтра,и интегратор, входом подключенный к выходу блока сравнения, а выходом - к второму входу первого сумматора 13 . Недостатком данного устройства является наличие фазового запаздывания. Цель изобретения - уменьщение фазов го запазды1зания устройства. Поставленная цель достигается тем, что в нелинейном корректирующем устройстве, содержащем последовательно соединенные первый фильтр, первое реле блок сравнения и сумматор, вторым входом подключенный к входу первого фильтра, и второй фильтр, выходом ч&pea второе реле подключенный к второму входу блока сравнения, дополнительно установлен тахогенератор, выходом подключенный к третьему входу сумматора и входу второго фильтра. На фиг. 1 представлена фушщиональ ная схема устройства в составе следящей системы на фиг. 2 - временные диаграммы, поясняющие принцип раб9Ты предлагаемого технического решения; ;, на фиг. 3 - са;руктурная схема одного из вариантов вьшолнения устройства в составе следящей системы. Устройство содержит двигатель 1, редуктор 2, измеритель рассогласования 3, первый суммирующий усилитель 4, тахогенератор 5, второй фильтр 6, второе реле 7, блок сравнения 8, вягорой суммирующий усилитель 9, первый . фильтр 1О,. первое реле 11, сумматор 12, нелинейное корректирующее устройство 13,Qp,) и Р0ь|Ц,соответственно входной и выходной сигналы следящей системы, Q - выходной сигнал измерителя рассогласования 3, li) - угловая скорость выходного вала двигателя 1, о. -вьхходные сигналы соответст вен1Ю второг о и первого реле 7 и 11, ; Q к - выходной сигнал блока 8 нелинейного корректирующего устройства. Р&дуктор 2 обладает люфтом. Нелинейное корректирующее устройствво работает в составе следящей системы следующим образом. На выходе измерителя рассогласования 3 при сравнении входного сигнала Qg и выходного сигналарр,|)(системы образуется сигнал ошибки Q , который через усилители 4 и 9 подается на двигатель 1, который приводит в движение редуктор 2. Характерной чертой больщинства редукторов, в особенности силовых, является наличие люфта, что приводит к ухудшению динамических характеристик системы. Как видно из диаграмм (фиг.2), в следящей системе в моменты реверса двигателя появляется динамическая ошибка, обусловленная тем, что во время вь1борки люфта входной сигнал б0х систв-, мы изменяется, а выходной сигнал системы остается постоянным. Для того, чтобы уменьшить ошибку, необходимо ускорить выборку люфта редуктора 2. Формирование корректирующего сигнала производится путем вычитания из
выкоавого сигнала первого реле 11 вы входного сигнала второго репе;7 в блоке сравнения S. Фазы выходных напряжений реле 7 и 11 настраиваются при помощи фильтров 6 и 1О.
Корректирующий сигнйл Рц , подаваемый на вход сумматора 12, ускоряет выборку, л1Ьфта редуктора 2 и уменьшает ошибку системы. .
Положительный (технический) эффект от использования предлагаемого технического решения заключается в уменьшении фазового запаздывания корректирующего устройства. Применение предлагаемого нелинейного корректирующего устройства в следящих системах позволяет повысить их точность за счет KON пенсации люфта редуктора 2.
.Повьшхенйе точности следящей системы при введении в ее состав нелинейног корректирующего устройстзза подтвер5 дается лабораторными испытаниями макета следящей системы, собранного в соответствии со структурной схемой системы на фиг. 3. В состав макета системы входят измеритель ;рассогласо вания 3, вьщолненный на потенциометре СП4-8, усилитель 4, вьшолненный н микросхемах операционных усилите лей 140УДУ и транзисторах 2Т907А, двигатель 1 постоянного тока типа ДПР-32, тахогенератор 5 типа 1,6 ТПЪ-2, редуктор 2 на цилиндрических шестернях 14 и 15, реле 11 .н 7 и филЕ/гры 1О н 6, вьшолненные на микросхемах сотерационных усилителей 140УД7. Функдиональиые блоки, вхо5 Д5щше в состав слеД5Ш1ей системы, им ют следующие параметры: К 2 О; Xj 4 мс - коэффициент усиления и постоянная времени усилителя 4, К. 20ОО град/в.с.Т,2 2О коэффициент передачи и постоянная времени двигателя 1, К 0,5. коэффициент передачи редуктора 2, К 4. в.с град - коэффициент передачи скоростной отрицательной обратной связи тахогенератора 5,
4 мс, Т
6 мс - постошшые
1-И
11
времени фильтра 6, Т Tj 4 мс - постоянные времени первого фильтра 10, с 15 В - урсдани реле 7 и 11, А 0,2° -величина люфта редуктора 2. При гармоническом входном сигнале с амплитудой А О, 5
-Н
31,4
и частотой
максимальная 12 . ошибка вкпах
25
, В баёовом объекте при том же входном воздействии gCb) О, 5 °-НSIH 3l,4t максимальная ошибка 23 .
Таким образом, введение предпагаемо30 го нелинейного корректирующего ycтpoйc v. ва в следящую систему позволяет повысить ее точность по сравнению с базовым I объектом в 2 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| Нелинейное корректирующее устройство | 1981 |
|
SU954919A1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Следящая система | 1981 |
|
SU999014A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Следящая система | 1987 |
|
SU1464138A1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| Следящая система | 1981 |
|
SU968783A2 |
НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО, содержащее последовательно соединенные пе|)вый фильтр, реле, блок сравнения и сумматор, вторым входом подключенный к входу первого фильтра, и второй фильтр, выхо дом через реле подключенный к второму входу блока сравнения,-о т л и а ю щ е е с я тем, что , с целью уменьшения фазового запаздьюания устройства, в нем дополнительно установлен тахогенератор, выходом псдключе ный к третьему Ероэду сумматора и входу второго фильтра.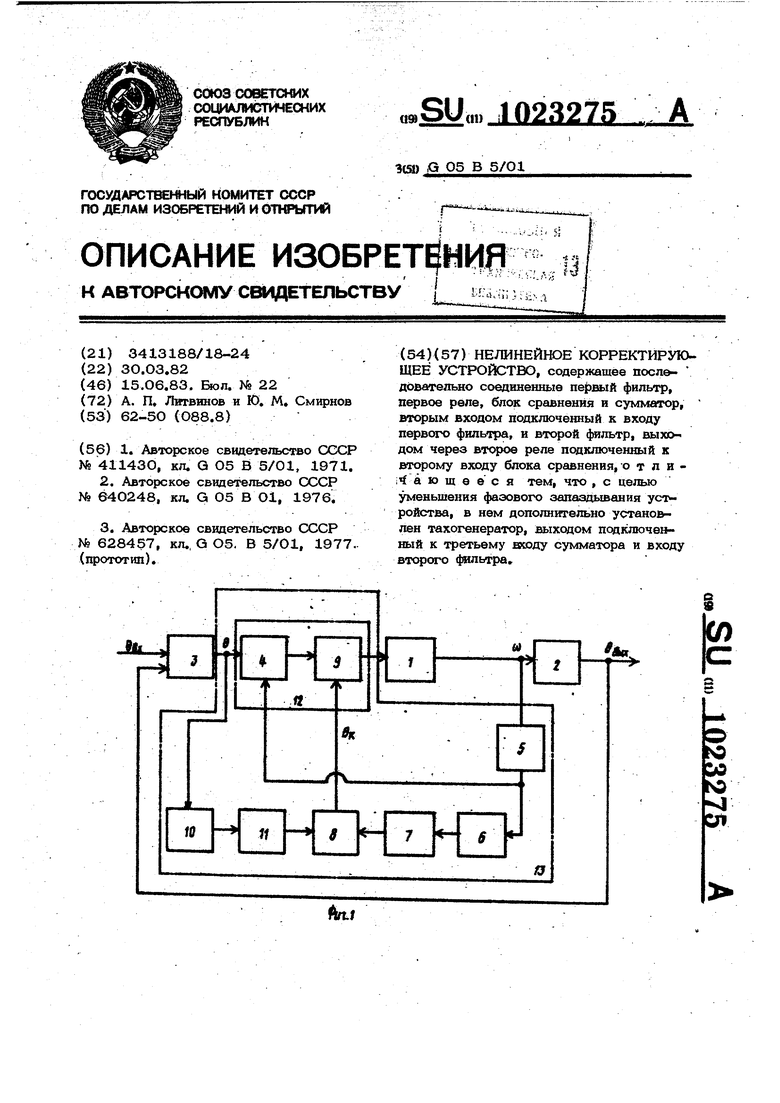
А/7.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СХЮР № 411430, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| -Кп | |||
