1
(21)4651007/03 (22)06.01.89 (46)30.04.91. Б юл. № 16
(71)Производственное объединение Сиб- тяжмаш и Красноярский институт цветных металлов им. М.И.Калинина
(72)Н.Г.Дьяконов и В.Я.Дьяконова (53)621.867(088.8)
(56)Авторское свидетельство СССР № 1154169, кл. В 65G 25/02, 1983. (54) ИНЕРЦИОННЫЙ КОНВЕЙЕР
(57)Изобретение относится к подъемно- транспортной технике и м.б. использовано в машиностроении, металлургической, химической, строительной и других отраслях промышленности. Цель - повышение производительности и надежности работы конвейера. Инерционный конвейер содержит желоб 1 с роликами 2, установленный на
основании 3 с возможностью возвратно-поступательного перемещения от привода. Последний включает электродвигатель 4, передающий вращение редуктору 5, на выходной конец которого насажен кривошип (К) 6. Другой конец К 6 шарнирно соединен с ползуном 7, расположенным с возможностью возвратно-поступального перемещения по направляющим продольного замкнутого паза 8, Паз 8 выполнен на конце одного из плеч двухплечего рычага (ДР) 9. Другой конец ДР 9 шарнирно связан с желобом 1 посредством тяги 12. Выполнен Кб регулириемым по длине. Длина К 6 настраивается на необходимую величину, включается привод, и выходной вал редуктора 5, вращаясь, вращает К 6 и передает движение ДР9. Через тягу 12 ДР9 передает движение желобу 1. 3 ил.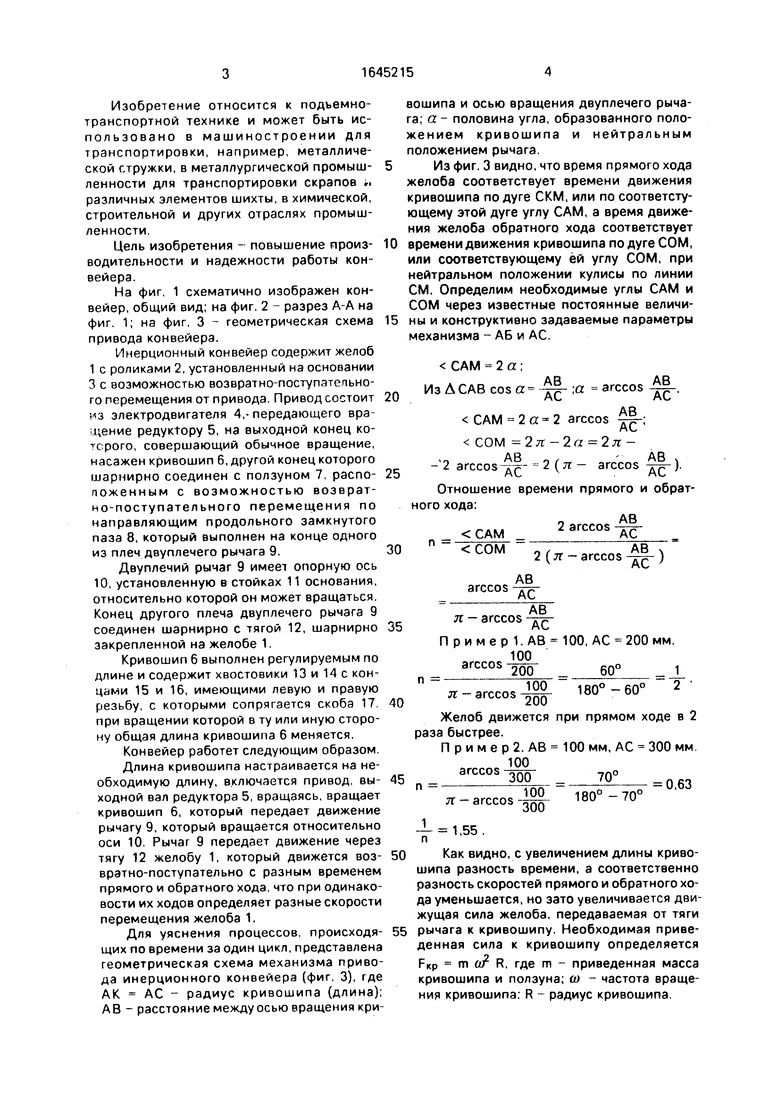
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1991 |
|
SU1787883A1 |
| Инерционный конвейер | 1982 |
|
SU1065311A1 |
| Инерционный конвейер | 1986 |
|
SU1351848A1 |
| Инерционный конвейер | 1988 |
|
SU1541154A1 |
| Инерционный конвейер | 1986 |
|
SU1350084A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ МАТЕРИАЛОВ НА УСТАЛОСТЬ | 1991 |
|
RU2024005C1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| Инерционный конвейер | 1986 |
|
SU1390137A1 |
| Кривошипно-шатунный механизм | 1990 |
|
SU1737190A1 |
| Исполнительный механизм пресса | 1981 |
|
SU958135A1 |

77
/}//}/// / №
О
сл го
сл
01/2.7
Изобретение относится к подъемно- транспортной технике и может быть использовано в машиностроении для транспортировки, например, металлической стружки, в металлургической промышленности для транспортировки скрапов , различных элементов шихты, в химической, строительной и других отраслях промышленности.
Цель изобретения - повышение производительности и надежности работы конвейера.
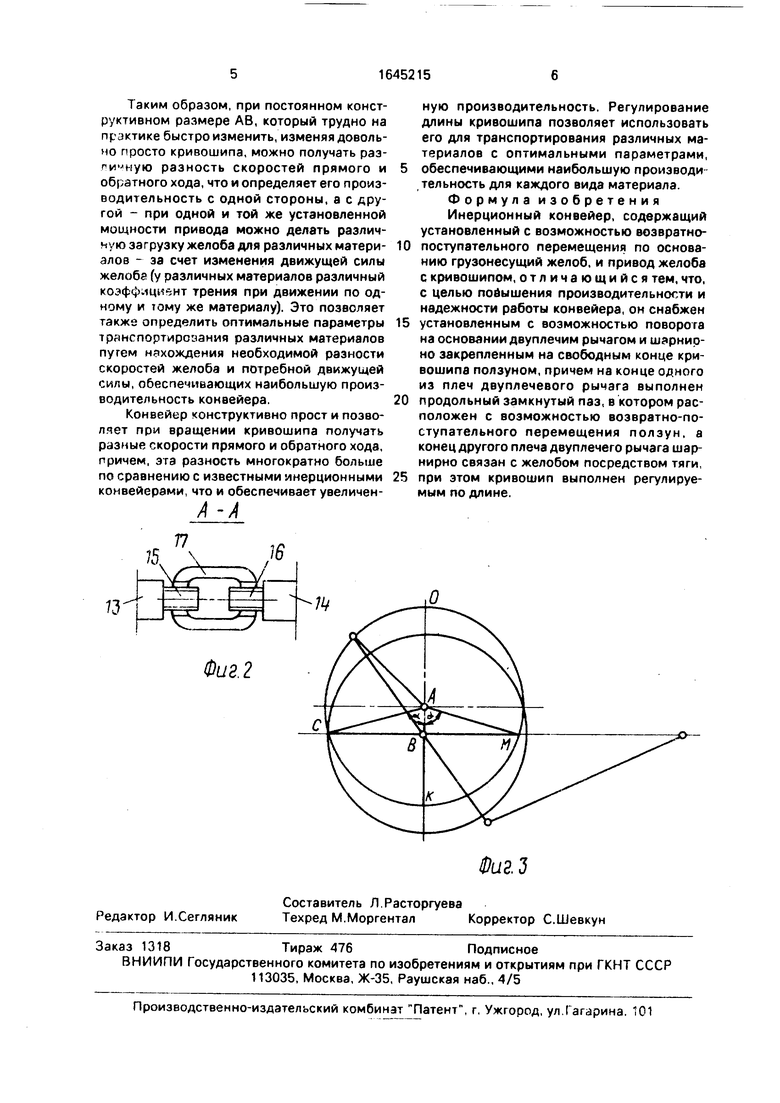
На фиг, 1 схематично изображен конвейер, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - геометрическая схема привода конвейера.
Инерционный конвейер содержит желоб 1 с роликами 2, установленный на основании 3 с возможностью возвратно-поступзтепьно- го перемещения от привода. Привод состоит яз электродвигателя 4,- передающего вращение редуктору 5, на выходной конец которого, совершающий обычное вращение, насажен кривошип 6, другой конец которого шарнирно соединен с ползуном 7, расположенным с возможностью возвратно-поступательного перемещения по направляющим продольного замкнутого паза 8, который выполнен на конце одного из плеч двуплечего рычага 9.
Двуплечий рычаг 9 имеет опорную ось 10, установленную в стойках 11 основания, относительно которой он может вращаться. Конец другого плеча двуплечего рычага 9 соединен шарнирно с тягой 12, шарнирно закрепленной на желобе 1.
Кривошип 6 выполнен регулируемым по длине и содержит хвостовики 13 и 14 с концами 15 и 16, имеющими левую и правую резьбу, с которыми сопрягается скоба 17. при вращении которой в ту или иную сторону общая длина кривошипа 6 меняется. Конвейер работет следующим образом. Длина кривошипа настраивается на необходимую длину, включается привод, выходной вал редуктора 5, вращаясь, вращает кривошип 6, который передает движение рычагу 9, который вращается относительно оси 10. Рычаг 9 передает движение через тягу 12 желобу 1, который движется возвратно-поступательно с разным временем прямого и обратного хода, что при одинаковости их ходов определяет разные скорости перемещения желоба 1.
Для уяснения процессов, происходящих по времени за один цикл, представлена геометрическая схема механизма привода инерционного конвейера (фиг. 3), где АК АС - радиус кривошипа (длина); АВ - расстояние между осью вращения кривошипа и осью вращения двуплечего рычага; а- половина угла, образованного положением кривошипа и нейтральным положением рычага.
Из фиг. 3 видно, что время прямого хода
желоба соответствует времени движения кривошипа по дуге СКМ, или по соответсту- ющему этой дуге углу САМ, а время движения желоба обратного хода соответствует
времени движения кривошипа по дуге СОМ, или соответствующему ей углу СОМ, при нейтральном положении кулисы по линии СМ. Определим необходимые углы САМ и СОМ через известные постоянные величины и конструктивно задаваемые параметры механизма - АБ и АС.
САМ 2 а ; Из Л CAB cosa
АВ АС
а arccos
АВ АС
5
0
САМ 2 а 2 arccos
АВ
АС СОМ 2л-2а 2л:АВ АВ
- 2 arccos-др 2 (п - arccos -vp-)AC v --- АС Отношение времени прямого и обратного хода:
АВ САМ
2 arccos
п
АС
СОМ
2 (я-arccos--)
arccos
АВ АС
35
я - arccos
АВ АС
0
п
Пример1.АВ 100, АС 200 мм. 100
60° JL 2
arccos
200
Jt - arccos
100 200
180° -60е
5 „
Желоб движется при прямом ходе в 2 раза быстрее.
Пример 2. АВ 100 мм, АС 300 мм. 100
70°
arccos
п
300
л - arccos
100 300
180° -70е
0,63
1
1,55 .
Как видно, с увеличением длины кривошипа разность времени, а соответственно разность скоростей прямого и обратного хода уменьшается, но зато увеличивается движущая сила желоба, передаваемая от тяги рычага к кривошипу. Необходимая приведенная сила к кривошипу определяется
FKp m a R, где m - приведенная масса кривошипа и ползуна; ш - частота вращения кривошипа; R - радиус кривошипа.
Таким образом, при постоянном конструктивном размере АВ, который трудно на практике быстро изменить, изменяя довольно просто кривошипа, можно получать раэ- разность скоростей прямого и обратного хода, что и определяет его производительность с одной стороны, а с другой - при одной и той же установленной мощности привода можно делать различную загрузку желоба для различных материалов - за счет изменения движущей силы желоб (у различных материалов различный коэффициент трения при движении по одному и тому же материалу). Это позволяет также определить оптимальные параметры транспортирования различных материалов путем нахождения необходимой разности скоростей желоба и потребной движущей силы, обеспечивающих наибольшую производительность конвейера.
Конвейер конструктивно прост и позволяет при вращении кривошипа получать разные скорости прямого и обратного хода, причем, эта разность многократно больше по сравнению с известными инерционными конвейерами, что и обеспечивает увеличенА -А
5
0
5
ную производительность. Регулирование длины кривошипа позволяет использовать его для транспортирования различных материалов с оптимальными параметрами, обеспечивающими наибольшую производи тельность для каждого вида материала. Формула изобретения Инерционный конвейер, содержащий установленный с возможностью возвратно- поступательного перемещения по основанию грузонесущий желоб, и привод желоба с кривошипом, отличающийся тем, что, с целью повышения производительности и надежности работы конвейера, он снабжен установленным с возможностью поворота на основании двуплечим рычагом и шзрнир- но закрепленным на свободным конце кривошипа ползуном, причем на конце одного из плеч двуплечевого рычага выполнен продольный замкнутый паз, в котором расположен с возможностью возвратно-поступательного перемещения ползун, а конец другого плеча двуплечего рычага шар- нирно связан с желобом посредством тяги, при этом кривошип выполнен регулируемым по длине.
О
