7/////////////.f//////// y,
ч
Фп1
00
Изо.бретение относится к подъемно- транспортной технике и может быть использовано в машиностроении для транспортировки, например, металлической стружки,в металлургической промышленности для транспортировки скра пов и различных компонентов шихты, в химической, строительной и других отраслях промышленности.
Цель изобретения - повьппение надежности работы и уменьшение мощности привода.
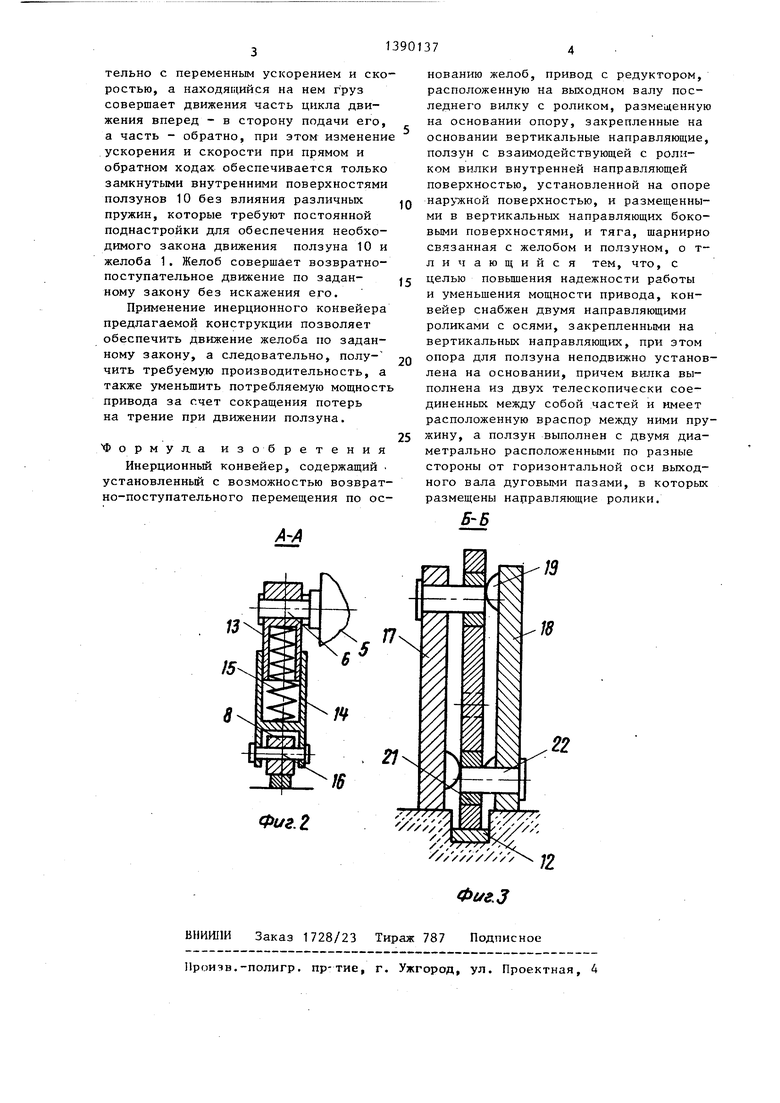
На фиг. 1 схематично изображен инерционный конвейер вид спереди; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Инерционный конвейер состоит из желоба 1, установленного с возможностью возвратно-поступательного перемещения по роликам 2, смонтированным на неподвижном основании 3, связанном с желобом 1 тягами 4 привода, в котором вращающий момент передает редуктор 5 с двумя выходными валами 6. На последние насажены вилки 7 с установленными на них роликами 8. Ролик 8 обкатывается по внутренней направляющей поверхности 9 ползуна 10, имеющий специальную про- фильную дорожку. Наружная поверхность 11 ползуна 10 установлена на опоре - на гладкой поверхности плиты 12. Плита 12 установлена на неподвижное основание 3. Для обеспечения обкатывания роликов по внутренней направляющей поверхности 9, имеющей переменные текущие радиусы относительно осей вращения выходных валов 6, вилки 7 выполнены из двух телеско пически соединенных межлу собой частей 13 и 14, имеющих возможность осевого взаимного перемещения, между которыми установлена враспор пружина 15.
На конце части 14 вилки 7 через ось 16 установлен ролик 8. Для фиксирования необходимого положения ползуна 10 вдоль боковых его поверхностей жестко на неподвижном основании 3 закреплены вертикальные нап- равляющие 17 и 18, в которых установлены шаровые опоры 19 для ползуна 10, взаимодействующие с боковыми поверхностями ползуна.
С целью исключения возможного отрыва ползунов 10 от плиты 12 при действии больших усилий на ползуны и при их небольшой собственной массе
Q
5
0 5 О .„
5
5
5
ползуны 10 выполнены с двумя диаметрально расположенными по разные стороны от горизонтальной оси вькодных валов 6 дуговыми пазами 20, с внутренними поверхностями которых взаимодействуют направляющие ролики 21 с возможностью свободного вращения в этих пазах и относительно несущих эти ролики 21 осей 22, закрепленных другими концами на направляющих 17 и 18.
Инерционный конвейер работает следующим образом.
Вращение с выходных валов 6 редуктора 5 передается вилкам 7 с роликами 8. Ролики 8, вращаясь по концентрическим траекториям, обкатываются по специальным внутренним профильным поверхностям 9.ползунов,выполненным с переменными текущими радиусами относительно осей вращения выходных валов 6, вилок 7 и соответственно роликов 8. При этом эти радиусы всегда меньше радиуса вращения ролика по концентрической траектории и это обеспечивается телескопическим устройством самой вилки 7, осевые усилия в которой воспринимает пружина 15.
Возникающие переменные по величине и знаку усилия от взаимодействия вращающихся роликов 8 со специальными внутренними профильными поверхностями 9 ползунов 10 перемещают их по опорной гладкой поверхности плиты 12. При этом организуется фиксированное в- вертикальной плоскости движение этих ползунов за счет того, что боковые поверхности ползунов имеют опоры с двух сторон.
Ползун 10 катается по плите 12, не отрываясь от нее за счет того, что пара пазов 10 внутренними поверхностями ползуна 10 постоянно взаимодействует с роликами 21, установленными на неподвижных осях 22, причем длина пазов 20 определяется ходом ползунов 10. Ползун движется свободно по гладкой поверхности при максимальных поте рях на трение качения в парах трения: внешняя поверхность ползуна - поверхность опорной плиты и боковая поверхность ползуна - шаровая опора.
Движение ползунов 10 через тяги 4 передается желобу 1, который движется по закону движения катков по опорной плите 12: возвратно-поступательно с переменным ускорением и скоростью, а находящийся на нем груз совершает движения часть цикла движения вперед - в сторону подачи его, а часть - обратно, при этом изменение ускорения и скорости при прямом и обратном ходах обеспечивается только замкнутыми внутренними поверхностями ползунов 10 без влияния различных пружин, которые требуют постоянной поднастройки для обеспечения необходимого закона движения ползуна 10 и желоба 1. Желоб совершает возвратно- поступательное движение по заданному закону без искажения его.
Применение инерционного конвейера предлагаемой конструкции позволяет обеспечить движение желоба по заданному закону, а следовательно, полу- чить требуемую производительность, а также уменьшить потребляемую мощность привода за счет сокращения потерь на трение при движении ползуна.
ормул.а изобретения Инерционный конвейер, содержащий установленный с возможностью возвратно-поступательного перемещения по ос0
нованию желоб, привод с редуктором, расположенную на выходном валу последнего вилку с роликом, размещенную на основании опору, закрепленные на основании вертикальные направляющие, ползун с взаимодействующей с ролн- ком вилки внутренней направляющей поверхностью, установленной на опоре наружной поверхностью, и размещенными в вертикальных направляющих боковыми поверхностями, и тяга, шарнирно связанная с желобом и ползуном, о т- ли чающийся тем, что, с целью повьшания надежности работы и уменьшения мощности привода, конвейер снабжен двумя направляющими роликами с осями, закрепленными на вертикальных направляющих, при этом опора для ползуна неподвижно установлена на основании, причем вилка выполнена из двух телескопически соединенных между собой частей и имеет расположенную враспор между ними пру- 5 жину, а ползун выполнен с двумя диаметрально расположенными по разные стороны от горизонтальной оси выходного вала дуговыми пазами, в которых размещены нарравляющие ролики.
5
0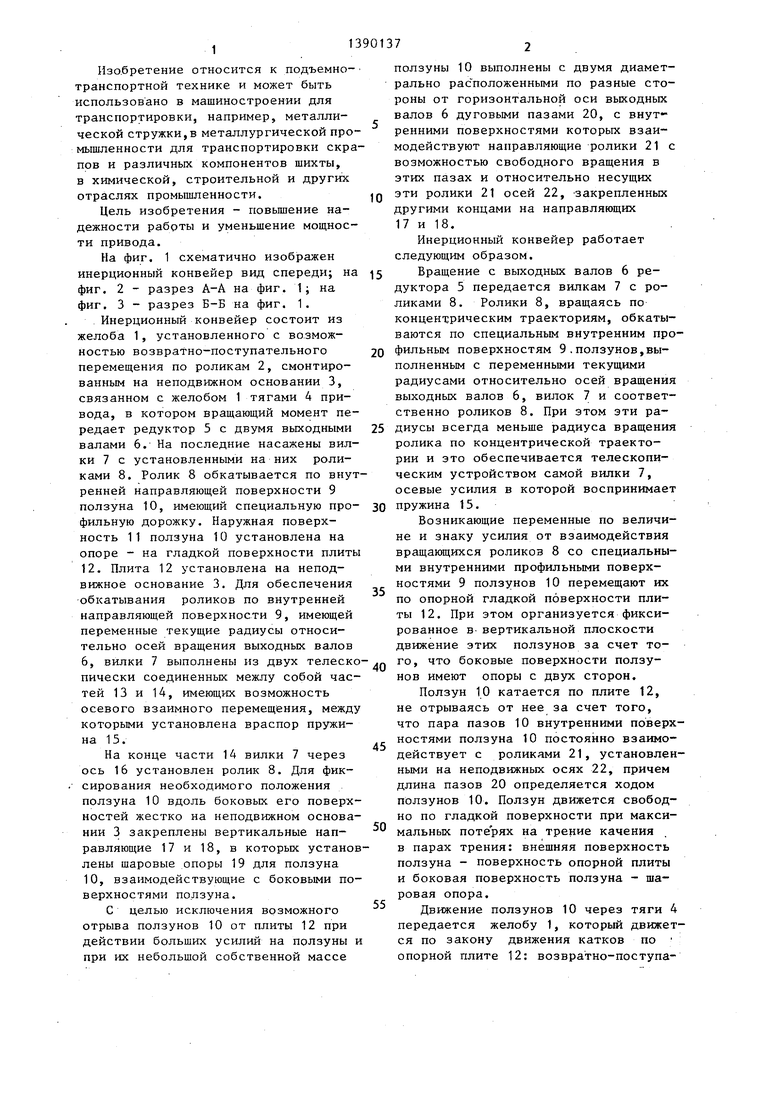
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1986 |
|
SU1351848A1 |
| Инерционный конвейер | 1985 |
|
SU1305086A1 |
| Инерционный конвейер | 1982 |
|
SU1065311A1 |
| Инерционный конвейер | 1984 |
|
SU1207920A1 |
| Инерционный конвейер | 1985 |
|
SU1276586A1 |
| Инерционный конвейер | 1987 |
|
SU1461700A1 |
| Инерционный конвейер | 1989 |
|
SU1645215A1 |
| Инерционный конвейер | 1991 |
|
SU1787883A1 |
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |
| Подающее устройство к деревообрабатывающему станку | 1985 |
|
SU1288061A1 |
Изобретение относится к подъемно-транспортной технике и м.б. использовано в машиностроении, металлургической, химической, строительной и др. отраслях пром-ти. Цель - повышение надежности работы и уменьшение мощности привода. На основании 3 конвейера смонтирован привод с редуктором 5 и выходным валом 6, на котором насажена вилка 7 с роликом 8, вьтолненная из двух телескопически соединенных частей с расположенной враспор между ними пружиной. На основании 3 неподвижно установлена опорная плита 12 с желобом t и жестко закреплены вертикальные направляющие (ВН), на которых закреплены оси направлякяцих роликов. Возникающие переменные по величине и знаку усилия от взаимодействия вращающихся роликов 8 с внутренними поверхностями 9 ползунов (П) 10 перемещают их наружной поверхностью по опорной плите 12. Фиксированное положение П 10 достигается за счет размещения их боковых поверхностей в ВН. Цо плите 12 катается П 10, не отрьшаясь, за счет взаимодействия направляющих роликов с диаметрально расположенными по разные стороны от горизонтальной оси вала 6 дуговыми пазами 20 П 10. Движения П 10 через связанную с ним тягу 4 передаются желобу 1, который движется.возвратно- поступательно с переменным ускорением по плите 12. Находящийся на желобе 1 груз часть цикла движения перемещается вперед, а часть - обратно. 3 ил. S (Л оо со
Фие.2
/, // /// --ТХ;
//; ;//х
| Инерционный конвейер | 1982 |
|
SU1065311A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
