Изобретение относится к подъемно-транспортной технике и может быть использовано в машиностроении для транспортировки, например, металлической стружки, в металлургической промышленности для транс- нортировки скрапов и различных компонентов шихты, в химической, строительной и других отраслях промышленности.
Целью изобретения является снижение энергоемкости конвейера.
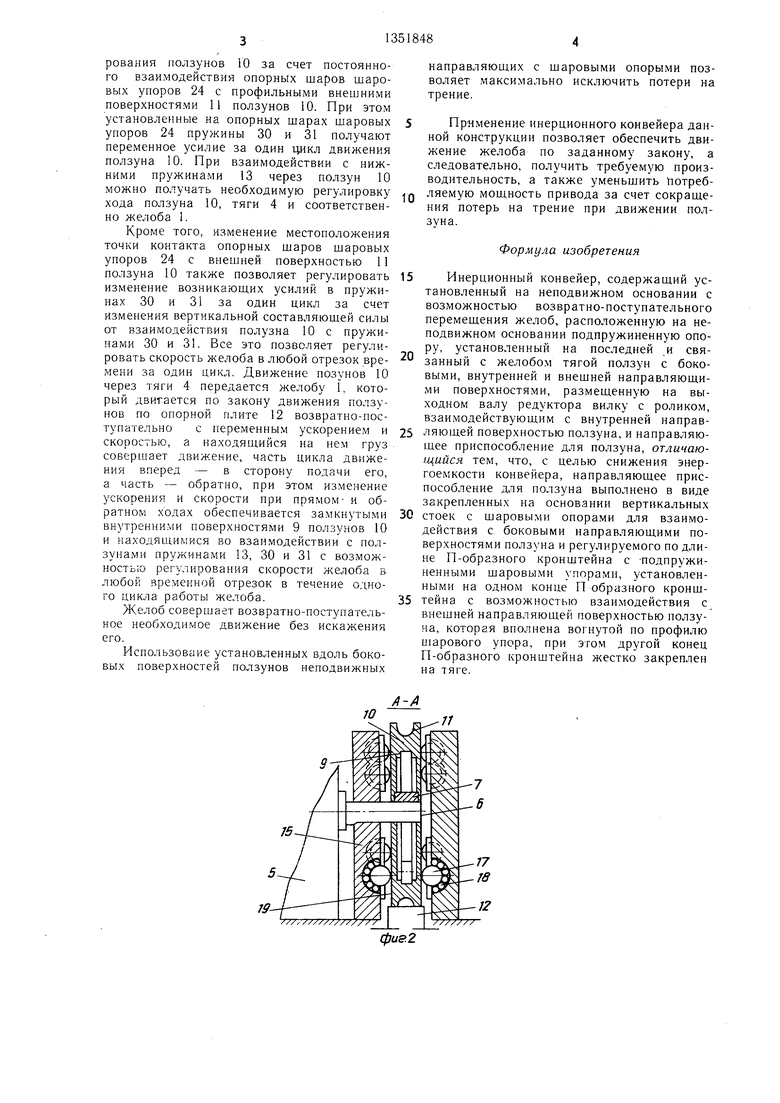
На фиг. 1 схематично изображен инерционный конвейер с приводом, вид спереди; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел 1 на фиг. I; на фиг. 4 - разрез Б-Б на фиг. 3.
Инерц-ионный конвейер состоит из желоба
1,установленного с возможностью возвратно-поступательного перемендения на роликах
2,с.монтированных на неподвижном основании 3, связанного с,желобом 1 тягами 4 привода, в котором вращающий момент передает редуктор 5 с двумя выходными валами 6. На выходные валы 6 насажены вилки 7 с установленными на них роликами 8. Ролик 8 обкатывается по внутренней направляющей поверхности 9 ползуна 10, имеющей специальную профильную дорожку. Ползун 10 имеет внешнюю направляющую поверхность 11 и боковые направляющие поверхности. Внешняя поверхность 11 ползуна 10 опирается на расположенную па пе- пОлТ.впжном основании 3 подпружиненную опору: на гладкую поверхность плиты 12. Плита 12 установлена на пружинах 13, каждая из которых имеет механизм 14 регулирования жесткости и ее хода. На неподвижном основании 3 боковых поверхностей ползунов 10 установле)ы жестко вертикальные стойки - направляю- щие 15, которые со стороны взаимодействия с боковыми направляющими поверх- ностя.ми ползунов 10 оборудованы шаровыми опорами 16, расположенными попарно в верхних и нижних частях направляющих 15 относительно горизонтальной оси ползуна 10.
Шаровая опора 16 содержит шар 17, установленный в сферу на направляющ.ей 15. Сфера заполнена шарами 18 меньшег о диаметра, на которые опирается шар 17. Шар 17 фиксируется в сфере при помощи прикрепленного к направляющей 15 нак.чад- ного листа 19 с отверстием для niapa 17.
Для исключения возможного 1есогласо- ванного с действиями пружин 13 движения вверх ползунов 10 и отрыва их от плиты 12, при действующих больших усилиях на ползуны и при их небольшой собственной массе, установлены механизмы 20 фиксирования ползунов 10 к плите 12 при их совместной работе. Каждый механизм 20 фиксирования выполнен в виде регулируемого по длине Н-образного кронштей- на 21, один конец 22 которого жестко прикреплен к тяге 4, а другой его конец 23 имеет шаровые упоры 24, установленные с возможностью взаимодействия с
внешней направляющей поверхностью 11 ползуна 10, которая выполнена вогнутой по профилю взаимодействующих с ней элементов - шаров шаровых упоров 24.
Конец П-образного кронштейна 21 соединен с несущей планкой 25, по концам которой закреплены направляющие щтыри 26 и 27 для стаканов 28 и 29, внутри которых установлены пружины 30 и 31. К стаканам 28 и 29 прикреплены опорные сферы 32, внутри которых смонтированы шары шаровых упоров 24, а пространство .между шаровыми упорами 24 и внутренними поверхностями сфер 32 заполнено шарами 33.
Внешняя поверхность 11 ползуна 10 имеет дорожку с профиле.м под установку шаров. Концы 22 и 23 П-образного кронштейна 21 соединены между собой связью 34, имеющей .механизм 35 из.мене- ния длины для регулирования плеча контакта шаров шаровых упоров 24 с наружной направляющей 11 ползуна 10 относительно конца 22 П-образного кронштейна 21 и относительно вертикальной оси ползуна 10.
Направляющие 15 с шаровыми опорами 16 и механизм 20 фиксирования ползунов 10 составляют направляющее приспособление для ползуна.
Инерционный конвейер работает следую- н,им образом.
Вращение с вьгходных валов 6 редуктора 5 передается ви.чка.ми 7 с роликами 8. Ролики 8, вращаясь по концентрическим траекториям, обкатываются по ctie- циальным внутренним профильным поверхностям 9 ползунов 10, выполненным с rsepe- менными текущими радиусами относительно осей вращения выходных валов 6, вилок 7 и соответственно роликов 8, Эти радиусы всегда меньше радиуса вращения ролика по концентрической траектории. Возникающие переменные по вели шне и знаку усилия от взаи.адодействия вращающихся роликов 8 со специальными внутренними профильными поверхностями 9 ползунов 10 перемещают их по опорной гладкой поверхности плиты 12, j ipH этом организуется фиксированное в вертикальной плоскости движение этих ползунов за счет того, что боковые поверхности их постоянно контактируют с luapOBbnm опорами 16. Ползуны двигаются свободно по Е ладкой поверхности при минимальных потерях иг трение-качение в пазах трения: внешняя поверхность нозуня-поверхность опорной пл: 1ты и боковая товерх 1ость ползуна - шаровая опора, установленная на 1 епод- вижной направляющей. Все шаровые опоры установлены неподвижно относительно боковых поверхностей ползунов, что обеспечивает гарантированные .мини.мальные потери на трение.
При движении ползунов 0 вместе с ними перемепхаются и тяги 4 с закрепленными на них механизмами 20 фиксирования ползунов 10 за счет постоянного взаимодействия опорных шаров шаровых упоров 24 с профильными внешними поверхностями 11 ползунов 10. При этом установленные на опорных шарах шаровых упоров 24 пружины 30 и 31 получают переменное усилие за один цикл движения ползуна 10. При взаимодействии с нижними пружинами 13 через ползун 10 можно получать необходимую регулировку хода ползуна 10, тяги 4 и соответственно желоба 1.
Кроме того, изменение местоположения точки контакта опорных шаров шаровых упоров 24 с внешней поверхностью 11 ползуна 10 также позволяет регулировать изменение возникаюших усилий в пружинах 30 и 31 за один цикл за счет изменения вертикальной составляюшей силы от взаимодействия полузна 10 с пружинами 30 и 31. Все это позволяет регулировать скорость желоба в любой отрезок времени за один цикл. Движение позунов 10 через тяги 4 передается желобу I, который двигается по закону движения ползунов по опорной плите 12 возвратно-поступательно с переменным ускорением и скоростью, а находяшийся на нем груз совершает движение, часть цикла движения вперед - в сторону подачи его, а часть - обратно, при этом изменение ускорения и скорости при прямом- и обратном ходах обеспечивается замкнутыми внутренними поверхностями 9 ползунов 10 и находящимися во взаимодействии с ползунами пружинами 13, 30 и 31 с возможностью регулирования скорости желоба в любой временной отрезок в течение одного цикла работы желоба.
Желоб совершает возвратно-поступательное необходимое движение без искажения его.
Использоваие установленных вдоль боковых поверхностей ползунов неподвижных
0
направляюш их с шаровыми опорыми позволяет максимально исключить потери на трение.
Применение инерционного конвейера данной конструкции позволяет обеспечить движение желоба по заданному закону, а следовательно, получить требуемую производительность, а также уменьшить потребд ляемую мощность привода за счет сокращения потерь на трение при движении ползуна.
Формула изобретения
Инерционный конвейер, содержащий установленный на неподвижном основании с возможностью возвратно-поступательного перемещения желоб, расположенную на неподвижном основании подпружиненную опору, установленный на последней и связанный с желобом тягой ползун с боковыми, внутренней и внешней направляющими поверхностями, размещенную на выходном валу редуктора вилку с роликом, взаимодействующим с внутренней направ5 ляющей поверхностью ползуна, и направляющее приспособление для ползуна, отличающийся тем, что, с целью снижения энергоемкости конвейера, направляющее приспособление для ползуна выполнено в виде закрепленных на основании вертикальных
0 стоек с щаровыми опорами для взаимодействия с боковыми направляющими поверхностями ползуна и регулируемого по длине П-образного кронштейна с -подпружиненными шаровыми упорами, установленными на одном конце П образного кронш5 теина с возможностью взаимодействия с внешней направляющей поверхностью ползуна, которая вполнена вогнутой по профилю шарового упора, при этом другой конец П-образного кронштейна жестко закреплен на тяге.
15
25
{pua4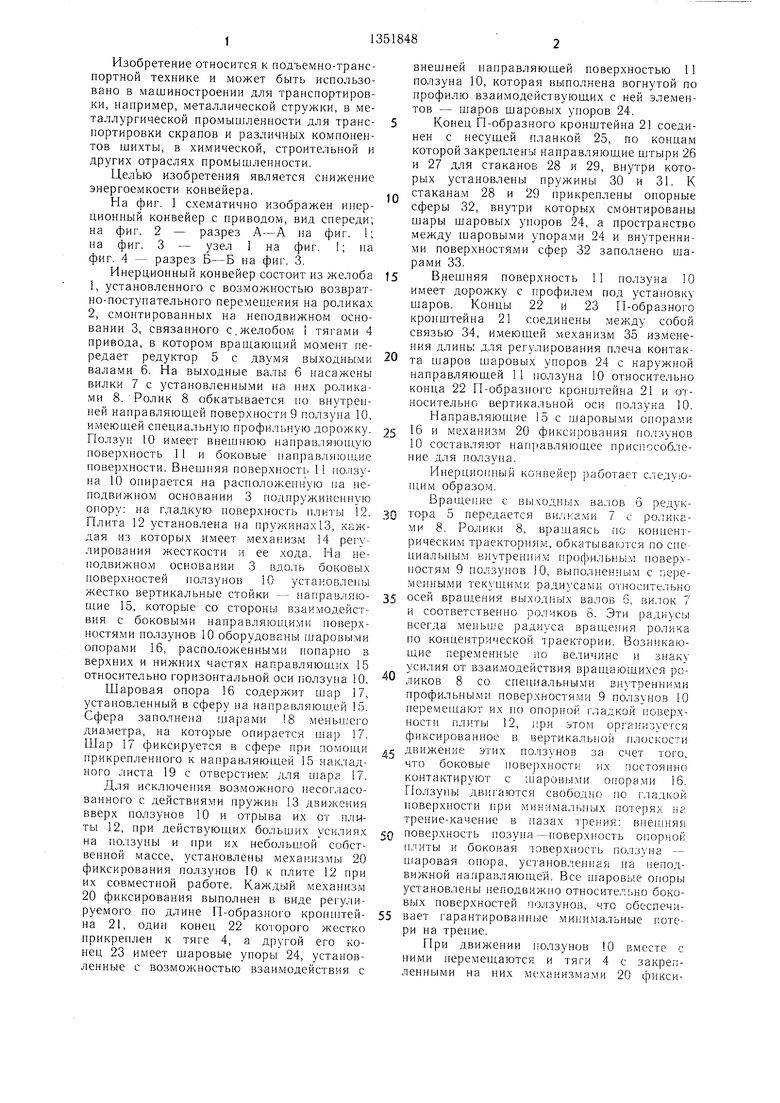
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1986 |
|
SU1390137A1 |
| Инерционный конвейер | 1985 |
|
SU1276586A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Инерционный конвейер | 1985 |
|
SU1305086A1 |
| Скребковый конвейер для уборки породной мелочи с конвейеров с резиновой лентой | 1986 |
|
SU1475482A3 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗДЕЛИЙ ИЗ ПОЛОСОВОГО ШПОНА | 1995 |
|
RU2064862C1 |
| Маневровое устройство для литейных установок | 1984 |
|
SU1336944A3 |
| Прибор для вычерчивания дуг окружностей | 1983 |
|
SU1088952A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ И ФИКСИРОВАНИЯ ЗАГОТОВОК | 1995 |
|
RU2080229C1 |
| Устройство для вырубки заготовок из плоского материала | 1984 |
|
SU1224053A1 |
Изобретение относится к подъемно- транспортной технике и может быть использовано в машиностроительной, химической, металлург ической и др. отраслях пром-ти. Цель изобретения - снижение энергоемкости конвейера. На неподвижном основании 3 с возможностью возвратно-поступательного перемещения установлен желоб 1, подпружиненная опора в виде плиты 12 и ползун с боковыми, внутренней и внешней 11 направляюшими поверхностя.ми, связанный с желобом 1 тягой 4 привода. КРУТЯШ.ИЙ момент от привода передает редуктор 5 с двумя выходными валами 6 с насаженными на них вилками 7 с роликами 8. На тяге 4 жестко закреплен один конец регулируемого по длине П-об- разного кронштейна 21. Другой его конец с подпружиненными шаровыми упорами (ШУ) взаимодействует с поверхностью 11, выполненной вогнутой по профилю ШУ. Направляющее приспособление для ползуна выполнено в виде вертикальных стоек 15 с шаровыми опорами 16 для взаимодействия с боковыми направляющими поверхностями ползуна и кронштейна 21. За один цикл движения ползуна пружины ШУ получают переменное усилие. При взаимодействии с пружиной 13 плиты 12 через ползун можно регулировть ход ползуна, тяги 4 желоба 1. Неподвижные направляющие с ШУ позволя от исключить потери на трение. Изменение местоположения точки контакта опорных шаров ШУ с поверхностью 11 и изменение усилий в пружинах ШУ позволяет регулировать скорость желоба 1 за один цикл. 4 ил. & 35 20 I I / / / оо СП 00 4: СХ5
| Инерционный конвейер | 1982 |
|
SU1065311A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
