Изобретение относится к учебным установкам по динамике механизмов, в частности к приборам для изучения динамического гашения колебаний в курсе теории механизмов и машин в технических вузах.
Целью изобретения является расширение демонстрационных возможностей путем переноса динамических колебаний в разные плоскости.
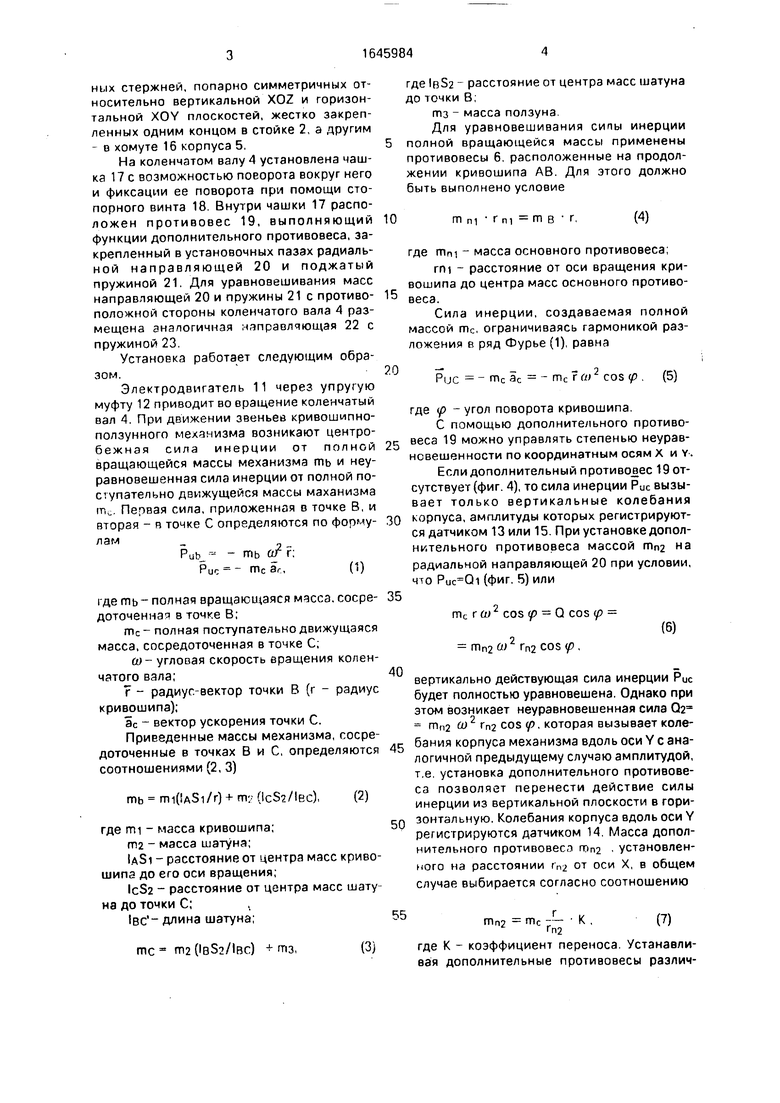
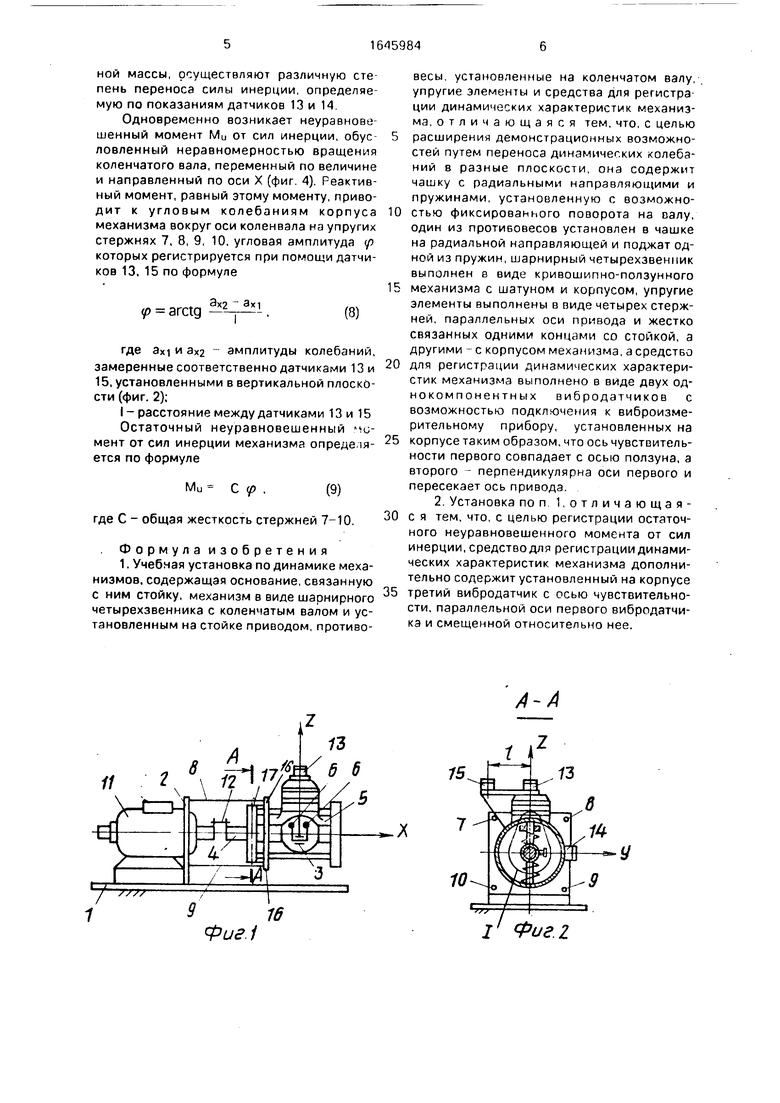
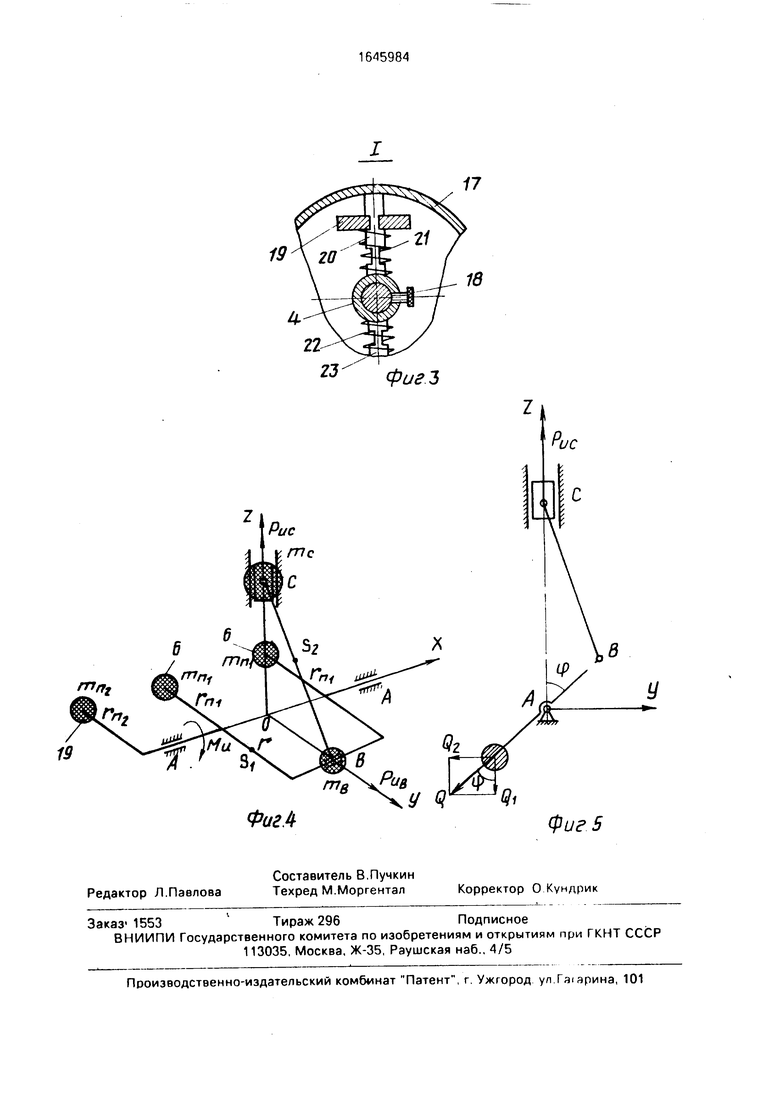
На фиг. 1 изображена установка; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на фиг. 4 и 5 - различные схемы кривошипно-ползунного механизма.
Учебная установка по динамике механизмов включает неподвижное основание 1 со стойкой 2, кривошипно-ползунный механизм 3 с коленчатым валом 4, шатуном и ползуном, установленный в корпусе 5, противовесы 6, выполняющие Функции основного противовеса,
установленные на коленчатом валу, упругие элементы (стержни) 7, 8, 9,10, связывающие корпус 5 со стойкой 2,привод в виде электродвигателя 11 с упругой муфтой 12, средство для регистрации динамических характеристик, выполненное в виде трех однокомпонентных вибродатчиков 13, 14, 15, связанных с виброизмерительным прибором (HP показан) и установленных в плоскости движения звеньев кривошипноползун- ного механизма. При зтом ось чувствительности первого вибродатчика 13 совпадает с осью Z ползуна, ось второго вибродатчика 14 перпендикулярна первой (ось Y) и пересекает ось X коленчатого вала 4 в точке О, а ось третьего вибродатчика 15 параллельна оси Z и смещена на расстояние I по отношению к ней.
Упругие элементы 7, 8, 9, 10 выполнены в виде четырех горитоитально устаноаленО
Јь
СП
о
00
Јь
ных стержней, попарно симметричных относительно вертикальной XOZ и горизонтальной XOY плоскостей, жестко закрепленных одним концом в стойке 2, а другим - в хомуте 16 корпуса 5.
На коленчатом валу 4 установлена чашка 17 с возможностью поворота вокруг него и фиксации ее поворота при помощи стопорного винта 18. Внутри чашки 17 расположен противовес 19, выполняющий функции дополнительного противовеса, закрепленный в установочных пазах радиальной направляющей 20 и поджатый пружиной 21. Для уравновешивания масс направляющей 20 и пружины 21 с противоположной стороны коленчатого вала 4 размещена аналогичная направляющая 22 с пружиной 23.
Установка работает следующим образом.
Электродвигатель 11 через упругую муфту 12 приводит во вращение коленчатый вал 4. При движении звеньев кривошипно- ползунного механизма возникают центробежная сила инерции от полной вращающейся массы механизма ть и неуравновешенная сила инерции от полной поступательно движущейся массы маханизма rrv. Первая сила, приложенная в точке В, и вторая - п точке С определяются по формулам
Риь - лпь а г
Рис - гпс аг,(1)
где ть,- полная вращающаяся мэсса. сосредоточенна в точке В;
гпс - полная поступательно движущаяся масса, сосредоточенная в точке С;
ft)- угловая скорость вращения коленчатого вала;
7 - радиус-вектор точки В (г - радиус кривошипа);
ас вектор ускорения точки С.
Приведенные массы механизма, сосредоточенные в точках В и С, определяются соотношениями (2, 3)
ть mi(ASi/r) + ту (1с52/ вс),
где mi - масса кривошипа;
та - масса шатуна;
1д51 - расстояние от центра масс кривошипа до его оси вращения;
lc$2 расстояние от центра масс шатуна до точки С;
IBC - длина шатуна;
тс - т2(1в52/1вс) + тз,
где 1в$2 - расстояние от центра масс шатуна до точки В,
тз - масса ползуна
Для уравновешивания сипы инерции полной вращающейся массы применены противовесы 6, расположенные на продолжении кривошипа АВ. Для этого должно быть выполнено условие
10
m ni г m m в г,
(4)
где mni - масса основного противовеса;
ггм - расстояние от оси вращения кривошипа до центра масс основного противовеса.
Сила инерции, создаваемая полной массой тс, ограничиваясь гармоникой разложения в ряд Фурье (1), равна
20
Рис - глс ас - me r (it2 cos p .
(5)
где р - угол поворота кривошипа.
С помощью дополнительного противовеса 19 можно управлять степенью неуравновешенности по координатным осям х и Y. Если дополнительный противовес 19от- сутствует(фиг. 4), то сила инерции Рис вызывает только вертикальные колебания
корпуса, амплитуды которых регистрируются датчиком 13 или 15. При установке дополнительного противовеса массой тП2 на радиальной направляющей 20 при условии, что (фиг. 5) или
тс г ш cos р - Q cos p
(б)
тП2 Ш ГП2 ,
40
вертикально действующая сила инерции Рис будет полностью уравновешена. Однако при этом возникает неуравновешенная сила 02 тП2 ш2 гП2 cos f, которая вызывает коле45 бания корпуса механизма вдоль оси Y с аналогичной предыдущему случаю амплитудой, т.е. установка дополнительного противовеса позволяет перенести действие силы инерции из вертикальной плоскости в гори5Q зонтальную. Колебания корпуса вдоль оси Y регистрируются датчиком 14. Масса дополнительного противовеса . установленного на расстоянии гП2 от оси X, в общем случае выбирается согласно соотношению
55
тп2 тс
Гп2
к,
(7)
где К - коэффициент переноса. Устанавливая дополнительные противовесы различной массы, осуществляют различную степень переноса силы инерции, определяемую по показаниям датчиков 13 и 14.
Одновременно возникает неуравновешенный момент Ми от сил инерции, обусловленный неравномерностью вращения коленчатого вала, переменный по величине и направленный по оси X (фиг. 4). Реактивный момент, равный этому моменту, приводит к угловым колебаниям корпуса механизма вокруг оси коленвала на упругих стержнях 7, 8, 9, 10, угловая амплитуда tf которых регистрируется при помощи датчиков 13, 15 по формуле
У arctg
(3)
где аХ1 и ах2 амплитуды колебаний, замеренные соответственно датчиками 13 и 15, установленными в вертикальной плоскости (фиг. 2);
I-расстояние между датчиками 13 и 15 Остаточный неуравновешенный ми- мент от сил инерции механизма определяется по формуле
Ми С (р ,
(9)
где С - общая жесткость стержней 7-10.
. Формула изобретения
1, Учебная установка по динамике механизмов, содержащая основание, связанную с ним стойку, механизм в виде шарнирного четырехзвенника с коленчатым валом и установленным на стойке приводом,противовесы, установленные на коленчатом валу, упругие элементы и средства для регистрации динамических характеристик механизма, отличающаяся тем, что, с целью
расширения демонстрационных возможностей путем переноса динамических колебаний в разные плоскости, она содержит чашку с радиальными направляющими и пружинами, установленную с возможностью фиксированного поворота на палу, один из противовесов установлен в чашке на радиальной направляющей и поджат одной из пружин, шарнирный четырехзвенник выполнен в виде кривошипно-ползунного
механизма с шатуном и корпусом, упругие элементы выполнены в виде четырех стержней, параллельных оси привода и жестко связанных одними концами со стойкой, а другими - с корпусом механизма, а средство
для регистрации динамических характеристик механизма выполнено в виде двух од- нокомпонентных вибродатчиков с возможностью подключения к виброизмерительному прибору, установленных на
корпусе таким образом, что ось чувствительности первого совпадает с осью ползуна, а второго - перпендикулярна оси первого и пересекает ось привода.
2. Установка поп 1,отличающаяс я тем, что, с целью регистрации остаточного неуравновешенного момента от сил инерции, средство для регистрации динамических характеристик механизма дополнительно содержит установленный на корпусе
третий вибродатчик с осью чувствительности, параллельной оси первого вибродатчи- кэ и смещенной относительно нее.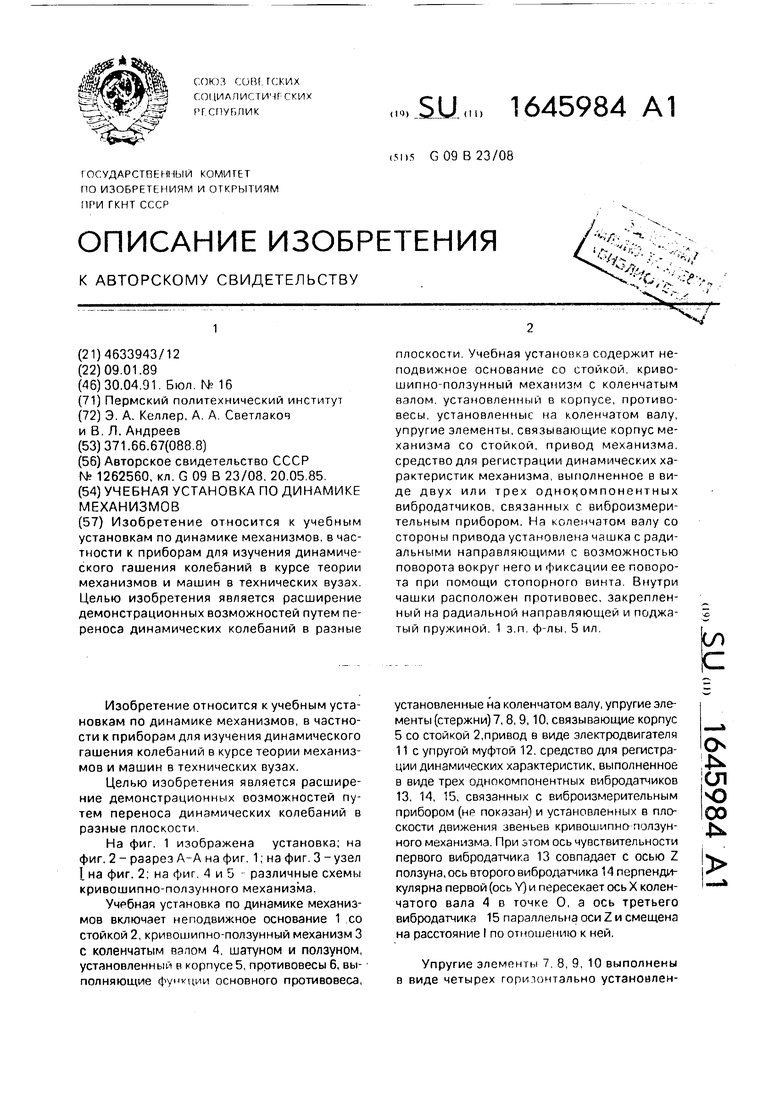
| название | год | авторы | номер документа |
|---|---|---|---|
| Четырехцилиндровый рядный двигатель внутреннего сгорания | 1990 |
|
SU1786312A1 |
| Силовой агрегат | 2023 |
|
RU2826661C1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ РАСПИЛОВКИ ПРЕИМУЩЕСТВЕННО МЯСНЫХ ТУШ | 1996 |
|
RU2107438C1 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| Стенд для испытания переносных моторных пил | 1978 |
|
SU682787A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| ПОРШНЕВАЯ МАШИНА (ЕЕ ВАРИАНТЫ) | 1994 |
|
RU2096638C1 |
| Способ динамической балансировкидВигАТЕлЕй ВНуТРЕННЕгО СгОРАНия иуСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU823920A1 |
| Двухкривошипный пресс | 1974 |
|
SU532533A1 |
| Способ уравновешивания динамического момента на входном валу привода возвратно-движущихся масс и устройство для его осуществления | 1990 |
|
SU1724970A1 |
Изобретение относится к учебным установкам по динамике механизмов, в частности к приборам для изучения динамического гашения колебаний в курсе теории механизмов и машин в технических вузах. Целью изобретения является расширение демонстрационных возможностей путем переноса динамических колебаний в разные плоскости. Учебная установка содержит неподвижное основание со стойкой, криво- шипно-ползунный механизм с коленчатым валом, установленный в корпусе, противовесы, установленные на коленчатом валу, упругие элементы, связывающие корпус механизма со стойкой, привод механизма, средство для регистрации динамических характеристик механизма, выполненное в виде двух или трех однокомпонентных вибродатчиков, связанных с виброизмерительным прибором. На коленчатом валу со стороны привода установлена чашка с радиальными направляющими с возможностью поворота вокруг него и фиксации ее поворота при помощи стопорного винта. Внутри чашки расположен противовес, закрепленный на радиальной направляющей и поджатый пружиной. 1 з.п ф-лы, 5 ил. (Л С
frrf
L-M
Г S/SS
Фиг.1
А-А
в
Г Фиг.г
ФигЛ
фигЗ
Фиг 5
| Учебный прибор по динамике механизмов | 1985 |
|
SU1262560A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
