|нрсА
СД
00
to
оэ
Изобретение относится к электротехнике и может быть использовано для управления частотой вращения электродвигателя постоянного тока0
Целью изобретения является повышение точности управления электроприводом.
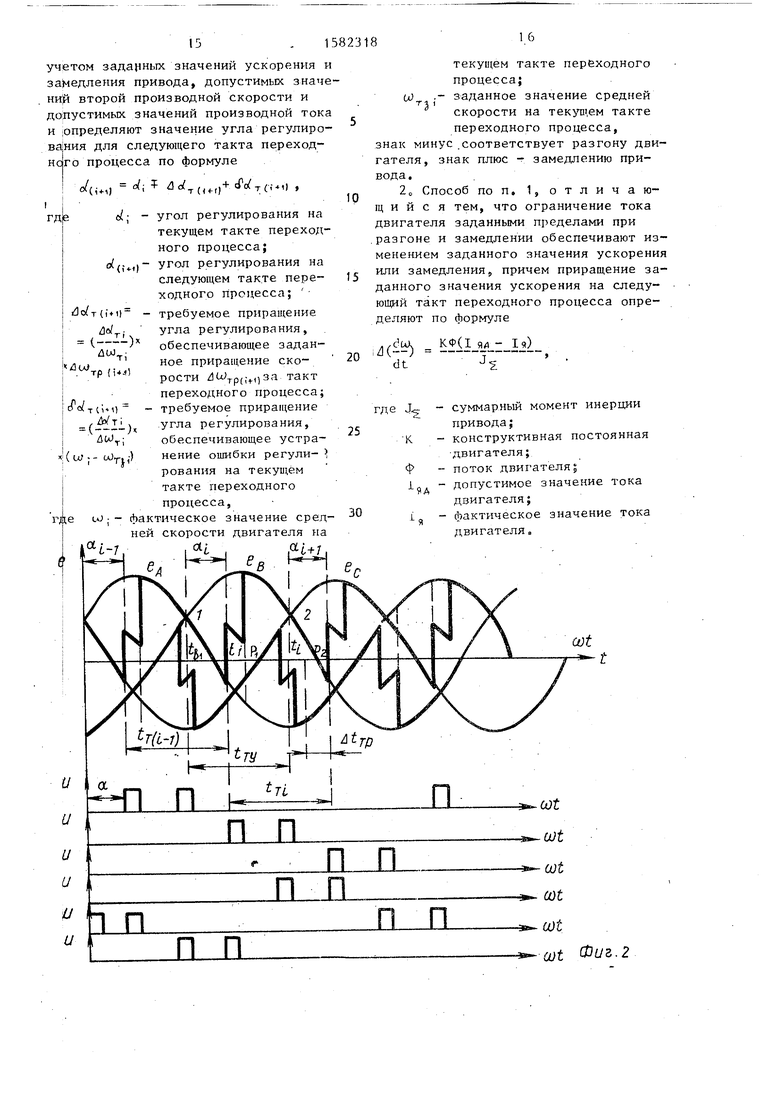
На фиг. -1 приведена схема электропривода; на фиг о 2 - диаграммы, йоясняющие реализацию предлагаемого способа.
1 Электропривод постоянного тока Додержит электродвигатель, якорная Ьбмотка 1 которого и обмотка 2 возбуждения подключены к выходам тиристорного преобразователя 3, управляющим входом соединенного с выходом системы 4 управления тиристорным Преобразователем, аналоговый датчик f тока, выход которого соединен с входом первого аналого-цифрового преобразователя 6, аналоговый датчик 7 ркорости, выход которого подключен к входу второго аналого-цифрового преобразователя 8, цифровой вычислительный блок 9, первый и второй входы которого соединены с выходами соответственно первого и второго Аналоговых преобразователей 6 и 8, цифро- аналоговый преобразователь Ю, вход которого соединен с информационным выходом цифрового вычислительного блока 9, развязывающий трансформатор 11, выводы первичной обмотки которого подключены к соответствующим выводам сети переменного тока и силовым входам тиристорного преобразователя 3, а выводы вторичной обмотки попарно соединены с входами соответственно первого, второго и третьего компараторов 12, 13 и 14, выходы которых подключены к установочным входам со-, ответственно первого, второго и третьего триггеров 15, 16 и 17. Входы сброса триггеров 15, 16 и 17 соединены с входами программируемого контроллера 18 прерываний цифрового вычислительного блока 9, устройство параллельного ввода-вывода 19 которого подключено к выходам триггеров 15, 16 и 17. Между выходом цифроана- логового преобразователя 10 и входом системы 4 управления тиристорным преобразователем включен функциональный преобразователь 20.
Электропривод работает следующим образом.
5
0
5
0
5
0
5
0
5
Перед началом работы подаются сигналы на входы сброса R триггеров 15, 16 и 17, которые устанавливают на их выходах сигнал О. При появлении сигнала на выходе одного из компараторов, что будет иметь место при равенстве напряжений двух каких-то соседних фаз, на вход установки S одного из триггеров будет подан сигнал, который обеспечит появление сигнала на выходе этого триггера„ Сигналы с выходов триггеров 15, 16 и 17 поступают на входы устройства параллельного ввода-вывода 19 цифрового вычислительного блока 9 и обеспечивают синхронизацию работы этого блока с сетью, который программным путем через заданные интервалы времени опрашивает аналогоцифровые преобразователи 6 и 8 датчиков 5 и 7 тока и скорости, а затем определяет средние значения тока и скорости. В качестве цифрового вычислительного блока 9 может быть использован универсальный программируемый контроллер Электроника МС 2702.
На каждом интервале дискретности тиристорного преобразователя, т0е. на каждом такте переходного процесса, блоком 9 вычисляется среднее значение тока и среднее значение скорости электродвигателя путем измерения их мгновенных значений через интервал времени длительностью, определяемой требуемой точностью определения средних значений скорости и тока, с последующим вычислением средних значений. Измерения начинаются при угле регулирования at. (фиго 2), т0е. в момент
i времени t-tf, - отсчитанного от
точки te. Измерения заканчиваются в момент времени t jp40 Продолжительность измерения равна tT--ЈtTf , где dt включает время, необходимое для выполнения расчетов при определении угла регулирования rf;, для следующего такта переходного процесса, и интервал времени, который обеспечивает изменение угла регулирования на следующем такте до открывания очередного тиристора при значении угла регулирования на предшествующем такте регулирования После определения среднего значения скорости (о, производится проверка выполненных условий ui|- u)j 0, где Ы}- заданное значение скорости Если это условие выполняет
ся, то проверяется условие o(J0 При выполнении этого условия на следующем такте переходного процесса определяются средние значения скорости и тока, а угол регулирования не изменяется. Если условие и О не выполняется, то в систему управления ти- ристорным преобразователем подается сигнал, обеспечивающий угол регулирования , при котором тиристор- ньй преобразователь закрыт.
Если условие w,- 0 не выполняется, то проверяется условие w,- Ш;
0, При выполнении этого условия, что свидетельствует о разгоне привода проверяется условие . Если условие не выполняется, то необходимо обеспечить увеличение тока якоря двигателя до значения, превышающего ста- тический ток, путем постепенного уменьшения угла регулирования тирис- торного преобразователя. Угол регулирования для следующего такта переходного процесса определяется по формуле
де
c/Ui , -ЧР.
do/ А/ть (77-L)-4 I
тр
Ml
Ят
ятр
- расчетное изменение угла регулирования на следующем такте переходного процесса.
Первоначальное значение расчетного коэффициента (До(т/Al) может быть определено заранее на основании расчетов переходных процессов.
Расчетное приращение тока на такте переходного процесса Д1 деляется по формуле
Ятр
опре«-Р-О -ft
,
преобразователем нового значения угла регулирования с, вновь начинается определение средних значений тока и скорости на следующем такте переходного процесса. При определении расчетного приращения тока Л1 ягр принимается продолжительность такта try , соответствующая постоянному углу регулирования 0 Такое допущение вполне обосновано, поскольку даже при максимальном значении производной тока, равном 25 номинальных значений тока в секунду, потребуется не менее 4 тактов переходного процесса для возрастания тока до номинального значения о Приращение угла регулирования о/, при котором ток будет достигать номинального значения, будет порядка нескольких градусов. Следовательно, приращение угла регулирования на каждом такте будет не более 1
°
одному такту при постоянном значении о( соответствует угол, равный 1 20° .
Если условия UP. и выполняются, то проверяется выполнение условия 0), где toK скорость, при которой начинается уменьшение ускорения с целью обеспечения желаемого характера переходного процесса в конце разгона двигателя 0 Коэффициент может подбираться экспериментально в процессе наладки привода исходя из заданного характера переходного процесса. Уменьшение /Зу то будет обеспечивать более плавное изменение скорости в конце разгона, то будет затягивать время разгона. Увеличение может приводить к заметному колебанию скорости в конце разгона, но обеспечивает более быстрое достижение заданной скорости (Oj.0
Если условие ui.- UIR 0 выполняется, то определяется фактическое значение среднего ускорения на текущем такте о формуле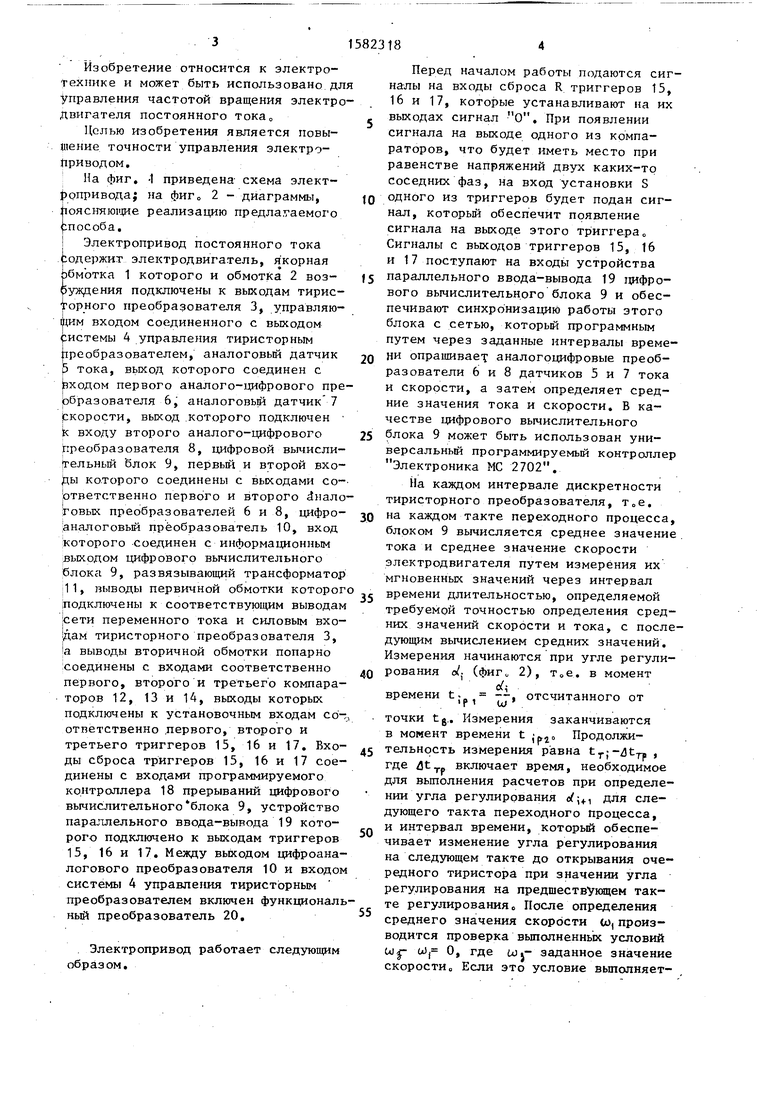
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для цифрового управления электродвигателем постоянного тока | 1989 |
|
SU1744785A1 |
| Цифровой позиционный электропривод | 1981 |
|
SU1029366A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2202481C2 |
| Электропривод постоянного тока | 1989 |
|
SU1646034A1 |
| Способ управления асинхронным электродвигателем лифта и устройство для его осуществления | 1988 |
|
SU1690159A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЁХФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2017 |
|
RU2735092C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| Двухзонный вентильный электропривод | 1980 |
|
SU928578A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2383863C1 |
Изобретение относится к электротехнике и может быть использовано для управления частотой вращения электродвигателя постоянного тока. Целью изобретения является повышение точности управления электроприводом. Тиристорный электропривод, реализующий способ цифрового управления, содержит электродвигатель, якорная обмотка 1 которого подключена к выводам тиристорного преобразователя 3, датчики 5 и 7 тока и скорости, цифровой вычислительный блок 9, выход которого через ЦАП 10 и функциональный преобразователь 20 связан со входом системы 4 управления тиристорным преобразователем 3. В данном способе при помощи цифрового вычислительного блока 9 определяется угол регулирования на следующий такт переходного процесса на основании анализа процесса регулирования на предшествующем такте переходного процесса, что устраняет влияние запаздывания тиристорного преобразователя 3. 1 з.п. ф-лы, 2 ил.
стимое значение производной i ™ а устанавливается исходя из
условий коммутаций двигателя и обычно не превышает 25 номинальных значений тока в секундуо
После первого такта переходного процесса коэффициент (йо(т/йТ.г) определяется -путем определения. c)4l-e/j и 41 jr ж;.,) Ifii .
После определения (WT/dIflr) и подачи в систему управления тиристорным
( -
4UJ
0
eft
Т Sfil.fi-i t
±J.
Tfl
где си; - средняя сг-орость на текущем такте переходного процесса;
to.. .- средняя скорость на предшествующем такте переходного процесса.
Продолжительность такта переходного процесса при разгоне t будет несколько изменяться при изменении
угла регулирования J., но это изменение будет незначительным, поскольку изменение угла регулирования 4«у на каждом такте переходного процесса будет величиной достаточно малой по сравнению со сдвигом по фазе между соседними фазами питающего напряжения, равным 120°.
Заданное приращение скорости на такте переходного процесса Л wr(r-+l) при выполнении условия Wj - будет определяться по формуле
4ЫтР«мг (2ПЕ .«/V
Л
тп -Jt
tVn
где (---)g допустимое значение второй производной скорости, которая устанавливается либо исходя из допустимого значения производной тока двигателя, либо из особенностей работы рабочей машины.
После определения дш.,, проверяется выполнение условия (ои-ил)- - Ла)Гр().,4(); Если условие выполняется, то определение угла регулирова- V,
ния (,4,j на следующий такт переходного процесса осуществляется по формуле
(
о( - Ло(т((+()+ т(ц„
,т.
4с/г(),я ,); Л/г,
aw.
4ii«) « (i- WF- / t-.
Расчетный коэффициент (--) для первого такта регулирования отпреде- 40 ляется предварительно на основании расчета переходных продессовс На следующих шагах (тактах) регулирования расчетный коэффициент определяется экспериментально с-использованием 45 формулы
CЈ-L)
/)
обеспечивает
Ih -I-lL ш, - u .,
Слагаемое dof(i+,|
заданное приращение скорости на следующем (1+1)-м такте переходного процесса. Слагаемое ) устраняет ч ошибку регулирования, которая могла появиться на i-м такте регулирования. Заданное значение скорости на i-м такте регулирования а | определяется как сумма значения скорости двигате
0
0
5
ля при выполнении условия w$- w, О и всех приращений скорости йшг на всех предшествующих тактах.
После определения (,,| и (uctr/aajr) их значения запоминаются и сигнал, соответствующий углу регулирования с(;+(. , подается в систему управления тиристорным преобразователем, затем осуществляется переход к определению скорости и тока на следующем такте. Если условие (,.) - AU)rf (,ч,) 0 не выполняется, то Дс(г,и и eOofr(i-+ty определяются по формулам:
Ч(,ч„ тро-,,, ;
(,Ч -( . а все остальное выполняется так же, как и при выполнении условия0
Если условие ш--(м.,70 не выполня К
ется при выполнении условий u/,- и W,0, TO определяется фактическое ускорение
,c/w,. йшг tu; 1 t и проверяется условие
(Ј) А 0
t-; 1 t- З и
0 5
oft
,dlU
где (-)з« заданное значение уско- J
рения.
Если условие выполняется, то расчетное приращение скорости на следующем такте определяется по формуле
,du, о UK
4uWir jt; fc + (
,
x 2
Затем определяется угол регулирования d ( на следующий такт по формулам:
O Tfi-M) ct;- (lt,,+ Го/(, + 0 ;
50
fun (-1) w
flCo,
тр (if)
где
cTo/f. . d+i)
-
Определяется расчетный коэффициент (4otT/dWT) как было описано выше, запоминаются значения (Wr/dWT), d. (,+1j
подается в систему управления - тиристорного преобразователя сигнал,
соответствующий углу регулирования /(Mj и начинается определение средних значений скорости и тока на следующем (i+O-м такте переходного процесса.
о/ t)u)
Если условие (- i -77 2у 0 не
выполняется, то определение расчетного приращения скорости для следую- щего такта переходного процесса осуществляется по формуле
,С/ОЛ
-Чр И vt
-.(,vti- (-тгКу tTB
и далее все выполняется как и при выполнении условия.
Если условие не выполняется, что свидетельствует о замедлении привода, то проверяется выполне- ние условия G0j 0 и если оно выполняется, то скорость uJк, при которой начинается уменьшение величины замедления, извлекают из памяти0 Если же условие оь-О не выполняется, то скорость WK, определяется по формуле ш к lf) Значение коэффициента /Ь j 1 выбирается исходя из желаемого характера переходного процесса в конце процесса замедления С увеличени- ем /ц скорость w«3будет уменьшаться что обеспечит более быстрое уменьшение скорости до нуля, но при этом могут возникнуть колебания скорости в конце замедления. Уменьшение будет обеспечивать более плавный переходный процесс, но будет атягивать пр оце с с замедл е ния.
После определения ы проверяется выполнение условия w;- . Если условие выполняется, то определяется фактическое значение замедления по формуле
iflk-V;
Т7
Ш;- Ш
,
-Т5
Продолжительность такта замедления tr, определяется по формуле
йе( тер
t-rj try +
ИЛЧ
. ,илч
где й --- t
TV
время замедления, за которое угол регулирования увеличивается от 0, при котором скорость рдвна номинальному значению,
ДОс/няч , при котором двигатель неподвижен
Определяется приращение скорости на следующем такте переходного про- цесса по формуле
JW
,() -Т- - (41%) trt
т/з(к) dt 1 Lr}, 2 и проверяется выполнение условия (шго,,) -ли;тр,м 00
Если условие выполняется, то угол регулирования л (U), для следующего такта переходного процесса определяется по формуле
о( (,4i) - с/; + т(1., +iTc/T,j
(i-м)
где
VT (иц Щ (шГ){
WT(,-MI (;} г
определяется (Лс/г/du/T) , си jr; как было описано выше при рассмотрении процесса разгона, запоминаются (; + ,) , ( /Јшт), tujr; и подается на систему управления тиристорным преобразователем сигнал управления, соответст- вуклций углу регулирования ol (,4t) Затем вновь начинается определение скорости и тока на следующем (Ј+1)-м такте переходного процесса.
Если условие (ы,-ш,)- йи)тр(; + 1| 0 не выполняется, то приращение угла регулирования 4c/r(jt определяется по формуле
. / fud-r TCUH ( UUJTP(5.)
и далее все выполняется как и при выполнении условия„
Если условие со(- при замедлении не выполняется, то определяется фактическое значение замедления
,du) Шт U);- U) ;.,
vt;; t;9 ;
и проверяется выполнение условия
$, -),о.
kdty93
,dlu)4
где (j)jt заданное значение замедления .
Если условие выполняется, то расчетное приращение скорости на следуК щем такте переходного процесса определяется по формуле
4Чр ti- +cjt«)9 ™T
и угол регулирования для следующего taKTa переходного процесса определяйся по формуле
rf/,4,1 i + (,ч«) + ,
НДР,Т4
.то«)- Ww
,т
Тр (14-1) .
Ч- , (г-1 К-Чт,
4СОТ Т1
40(7
Определяются значения ()
и запоминаются их значения, а также Запоминают значение d. (j41| . После того подается сигнал управления, Соответствующий углу регулирования if (,«.) , в систему управления тиристор Ным преобразователем. Затем вновь на чинается определение скорости и тока ka новом такте переходного процесса.
,o/w c/w Если условие (-J-) ; - ( не
выполняется, то расчетное приращение скорости на следующем такте переходного процесса будет определяться по формуле
.c/W, ДШтр(,„,в CJtV Ч
и далее все выполняется как и при вы- полнении условия
Ф.
40
Определение сигнала управления U
для системы управления тиристорным преобразователем, соответствующего , вычисленному углу регулирования o((I4.t), осуществляется с использованием за- 45 висимости ol f (U у) , известной для каждого конкретного выпрямит-еля „
Если необходимо обеспечить предельно допусти мые значения ускорения и замедления, определяемые пере- грузочной способностью двигателя, то заданное значение ускорения (замедления) определяется по формуле
,au /«Iw. /dw,
(€Н -
Приращение заданного значения ус,d. корения &(-;-} ; на текущем такте пе0) L
0
5
0 5
0
5
0
5
5
реходного процесса будет определяться выражением
( К«К1 -,) d(-)t ;
где J - суммарный момент инерции
привода; К - конструктивная постоянная
двигателя;
Ф - поток двигателя; 1„ - допустимое значение тока
двигателя; I - фактическое значение тока
двигателя„
dw
После определения (-) в дальнейС« L
шем управление тиристорным преобразователем осуществляется так же, как и в том случае, когда заданное зна(0( (JJ -). -остается постоянным.,
л L
Если отклонение скорос.ти от заданного значения произошло вследствие изменения нагрузки на валу двигателя, то возвращение скорости к заданному значению будет осуществляться так же, как и при отработке сигналов задания скорости. Действительно, на каждом такте переходного процесса (интервале дискретности тиристорного преобразователя) происходит определение скорости двигателя и сравнение ее с заданным значением. Следовательно, не позднее чем через 0,007 будет обнаружено отклонение скорости от заданного значения при изменении нагрузки и начнется процесс возвращения ее к заданному значению,, Быстродействие регулирования будет определяться допустимыми значениями производной тока, которая однозначно связана с допустимым значением второй производной скорости.
После определения средних значений тока и скорости определяется угол регулирования (,vi) на следующий такт переходного процесса по методике, изложенной ранее о Значение ,) передается в цифроаналоговый преобразователь 10, а выходной сигнал ДАЛ подается в функциональный преобразователь 20 для преобразования в сигнал управления U, соответствующий углу регулирования о((1)) и подаваемый в систему управления тиристорным преобразователем 4 о
Определение угла регулирования на следующий такт переходного процесса на основании анализа процесса ре-
гулирования на предшествующем такте переходного процесса устраняет влияние чистого запаздывания тиристорног преобразователя, связанного с его неполной управляемостью, что повышает точность регулирования. Точность регулирования существенно повышается также за счет того, что определение расчетного коэффициента (4 r/dtcp на каждом такте переходного процесса на основании анализа переходных процессов на этом такте означает, что непрерывно осуществляется идентификация объекта регулирования с учетом всех воздействий на электропривод, позволяющая с высокой точностью определять приращение угла регулирования на следующий такт регулирований. Определение приращения скорости на следующий такт переходного процесса с учетом ограничений на вторую производную скорости (с/ cu/c/t ) и производную тока c/J, , а также постепенное уменьшение ускорения при под- ходе скорости к заданному значению
позволяют обеспечить оптимальный характер переходного процесса в соответствии с требованиями рабочей машины.
Определение угла регулирования путем его непрерывного изменения при наличии отклонения скорости от заданного значения обеспечивает устранение установившейся ошибки, т.е„ система обладает астатизмом как при от- работке сигнала задания, так и при колебании нагрузки.
Существенно облегчается наладка системы регулирования скоростью, поскольку наладка сводится к записи в ячейки памяти заданного значения скорости, заданных значений ускорений и замедления, допустимых значений второй производной скорости и производной тока, а также подбору скорости ю. при которой начинается уменьшение
К
ускорения или замедления, что обеспечивает подбор заданного характера переходного процесса при проходке и
заданного значения скорости. Формула изобретения
угла регулирования тиристорного преобразователя на следующий такт переходного процесса, отличающийся тем, что, с целью повышения точности управления электроприводом, измеряют мгновенные значения скорости и тока через заданный интервал времени, причем измерение мгновенных значений скорости и тока на каждом такте переходного процесса начинают с момента открывания очередного тиристора, вычисляют средние значения скорости и тока на каждом такте переходного процесса и запоминают их, если скорость двигателя равна нулю, то определяют абсолютное значение отношения приращения угла регулирования к приращению тока якоря, вызванному приращением угла регулирования на данном такте переходного процесса, и запоминают его, определяют значение угла регулирования для следующего такта переходного процесса по формуле
тр
о(-- угол регулирования на текущем такте переходного процесса;/ ,Ло/г
41ЯТр Расчетное изменение т угла регулирования на следующем такте переходного процесса;
Ј
т
- первоначальное значение расчетного коэффициента;
/dI«N
тр dt 9 ту Расчетное приращение тока на такте переходного процесса;
- допустимое значение производной тока;
- продолжительность такта переходного процесса,
если же скорость двигателя больше нуля, то определяют абсолютное значение отношения приращения угла регулирования к приращению скорости, вызванному приращением угла регулирования на данном такте переходного процесса, и запоминают его, определяют расчетное приращение скорости на следующий такт переходного процесса с
учетом заданных значений ускорения и замедления привода, допустимых значений второй производной скорости и допустимых значений производной тока и определяют значение угла регулирования для следующего такта переход- Hqro процесса по формуле
Л(,«.,, (, dcfT{1.,,+ «frfT(i,,, ,
де о(; - угол регулирования на текущем такте переходного процесса; угол регулирования на следующем такте переходного процесса; i4«T( - требуемое приращение угла регулирования, обеспечивающее заданное приращение скорости 4WTp(,i)3a такт переходного процесса; °«T(Ui) - требуемое приращение угла регулирования, обеспечивающее устранение ошибки регули- рования на текущем такте переходного процесса,
де -о , - фактическое значение средней скорости двигателя на
1
,Т|,
()х
лыт,
),
Л(л)т,
;(ы;- oOTJ,)
i
Л1-7
-п п
ы
СЗа
Л И
п п
И
п
п п
0
5
0
текущем такте переходного
процесса; W ;- заданное значение средней
скорости на текущем такте
переходного процесса, знак минус соответствует разгону двигателя, знак плюс - замедлению привода.
20 Способ по п. 1, отличающийся тем, что ограничение тока двигателя заданными пределами при разгоне и замедлении обеспечивают изменением заданного значения ускорения или замедления, причем приращение заданного значения ускорения на следующий такт переходного процесса определяют по формуле
..с их КФ(1 я - 19)
dt
J2
где J К
9А
суммарный момент инерции
привода;
конструктивная постоянная
двигателя;
поток двигателяj
допустимое значение тока
двигателя;
фактическое значение тока
двигателя
U)t
п п
U)t
cut uz.2
| Файнштейн В„Г,, Файнштейн Э.Г., Гераймович И0Ти, Жуков Н„С | |||
| Непосредственное per -лирование скорости ти- рксторного электропривода постоянного тока | |||
| - Электротехническая промышленность Сер0 Электропривод, 1980, № 3 (83), с | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство для генерирования переменного тока при помощи катодной лампы | 1925 |
|
SU2603A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
