to
15
20
11232521
Изобретение относится к транспорту, в частности к устройствам для индивидуального регулирования нагрузок тяговых электродвигателей подвижного состава с двигателями независимого возбуждения.
Цель изобретения - повьшение экономичности.
На фиг. 1 - функциональная блок- схема предлагаемого устройства, на фиг. 2 - временные диаграммы токов и напряжений в элементах устройства.
Устройство содержит регулятор 1 тока возбуждения и якорных токов, к входам которого подключены задатчик 2 силы тяги, задатчик 3 частоты вращения, датчик 4 тока возбуждения, датчик 5 частоты вращения. Датчики 6 и 7 якорных токов тяговых двигателей подключены к входам блока 8 вьщеления максимального сигнала и к одним из входов блоков 9 и 10 сравнения. Выход блока 8 подключен к входу регулятора 1 тока возбуждения и якорных токов и к другим входам бло- ков 9 и 10 сравнения. Выходы блоков 9 и 10 через элементы 11 и 12 задержки соединены с одними из входов блоков 13 и 14 умножения, к другим входам которых через блок 15 нелинейности подключен датчик 4 тока возбуждения. Выходы блоков 13 и 14 через замыкающие контакты 16 и 17 переключателя 18 и инверторы 19 и 20 соединены с входами сумматоров 21 и 22. С этими же входами сумматоров 21 и 22 выходы блоков 13 и 14 соединены размыкающими контактами 23 и 24. Дру- Ьие входы сумматоров 21 и 22 соединены размыкающим контактом 25 переключателя 18с одним источником 26, а замыкающим контактом 27 - с другим источником 28 смещения. Выходы сумматоров 21 и 22 соединены с входами фазорегуляторов 29 и 30, выходы кото- 45 рых через блоки 31 и 32 ограничения азы и формирователи 33 и 34 подключены к входам тиристорных ключей 35 36. Тиристорные ключи подключены параллельно обмоткам 37 и 38 возбужения тяговых двигателей, питающихся от управляемого выпрямителя 39. Якорые обмотки 40 и 41 .тяговых двигатеей подключены к выпрямительно-инвер- орному преобразователю 42, который, ак и выпрямитель 39, подключен к ыходу регулятора 1 тока возбуждеия и якорных токрв.
к л
н д м в и у ни м ни
о
ю и о я си вр и ру ве вы зо со ра он че ны то ны те жи вы ки
ны об из в нь 55 во бл ра и
30
35
40
50
0
5
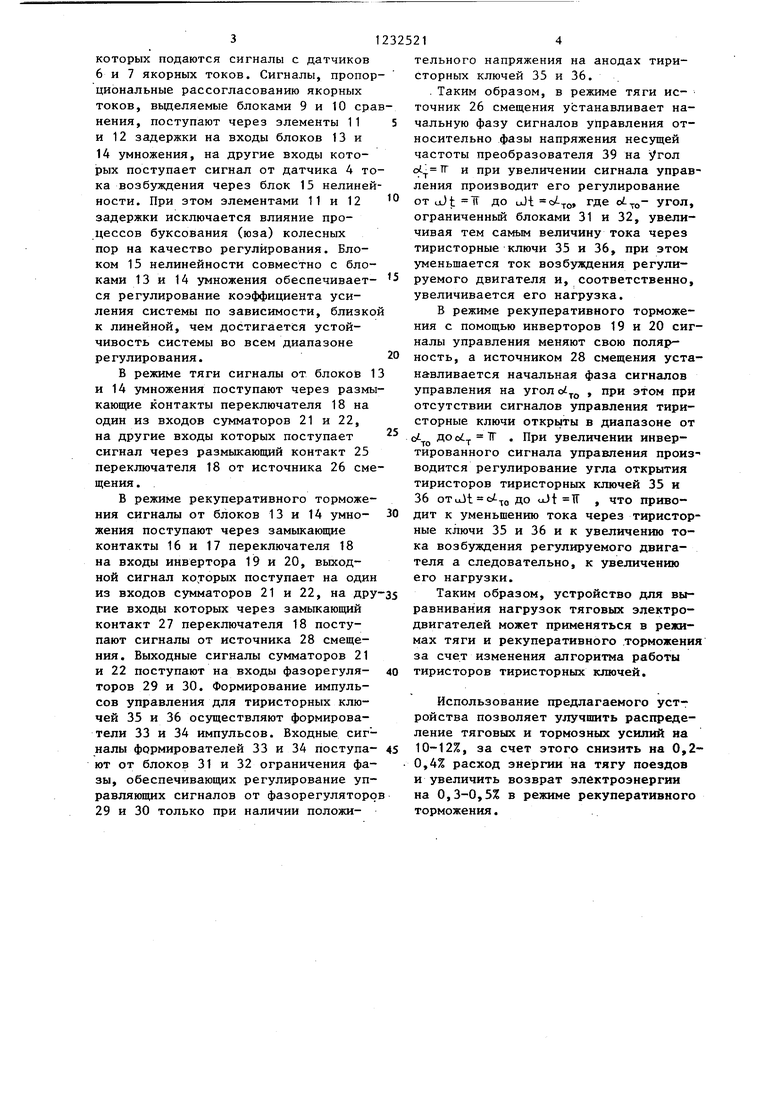
На временных диаграммах показаны кривая о. напряжения на выходе управляемого выпрямителя 39, кривая S тока управляемого выпрямителя 39, кривая 6 напряжения тиристорных ключей 35 и 36, кривая г напряжения управления на входе тиристорных ключе 35 и 36, кривая Э тока тиристорных ключей 35 и 36 при углах cytt. регулирования тиристоров управляемого выпрямителя 39 и с регулирования тиристоров тиристорных ключей 35 и 36.
Выравнивание нагрузок тяговых двигателей основано на индивидуальном регулировании токов возбуждения двигателей, нагрузка которых меньше максимальной. При этом рассогласование нагрузок между регулируемым и наиболее нагруженным двигателем устраняется в режиме тяги уменьшением, а в режиме рекуперативного можения увеличением тока возбуждения регулируемого двигателя.
Устройство работает следующим образом.
На входах регулятора 1 сравниваются в форме напряжения заданные и действительные значения сигналов от датчиков 5-7 частоты вращения и якорных токов и задатчиков 2 и 3 силы тяги (торможения) и частоты вращения. Разность между заданными и действительными значениями регулируемых параметров воз;гействует на величину угла открытия тиристоров выпрямительно-инверторного преобразователя 42 и выпрямителя 39. Путем соответствующего изменения угла отпирания тиристоров преобразователя 42 он работает в режиме выпрямителя, через который получают питание якорные обмотки 40 и 41, и режиме инйер- тора,. преобразуя постоянный ток якорных обмоток 40 и 41 тяговых двигателей, работающих в генераторном режиме, в переменный. Через управляемьй выпрямитель 39 получают питание обмотки 37 и 38 возбуждения.
Датчиками 6 и 7 измеряются якорные токи параллельных ветве.й якорных обмоток 40 и 41 тяговых двигателей, измеренные значения токов поступают в блок 8, которьш выбирает максималь- ньй ток наиболее нагруженного тяго- 5 вого двигателя. Сигнал, вь реленный блоком 8, поступает на вход регулятора 1 и на суммирующие входы блоков 9 и 10 сравнения, на вычитающие входы
0
5
0
0
которых подаются сигналы с датчиков 6 и 7 якорных токов. Сигналы, пропорциональные рассогласованию якорных токов, вьщеляемые блоками 9 и 10 сравнения, поступают через элементы 11 и 12 задержки на входы блоков 13 и 14 умножения, на другие входы которых поступает сигнал от датчика 4 тока возбуждения через блок 15 нелинейности. При этом элементами 11 и 12 задержки исключается влияние процессов буксования (юза) колесных пор на качество регулирования. Блоком 15 нелинейности совместно с блоками 13 и 14 умножения обеспечивается регулирование коэффициента усиления системы по зависимости, близкой к линейной, чем достигается устойчивость системы во всем диапазоне
регулирования.
В режиме тяги сигналы от блоков 13 и 14 умножения поступают через размыкающие контакты переключателя 18 на один из входов сумматоров 21 и 22, на другие входы которых поступает сигнал через размыкающий контакт 25 переключателя 18 от источника 26 смещения .
В режиме рекуперативного торможения сигналы от блоков 13 и 14 умножения поступают через замыкающие контакты 16 и 17 переключателя 18 на входы инвертора 19 и 20, выходной сигнал которых поступает на один из входов сумматоров 21 и 22, на другие входы которых через замыкающий контакт 27 переключателя 18 поступают сигналы от источника 28 смещения. Выходные сигналы сумматоров 21 и 22 поступают на входы фазорегуля- торов 29 и 30. Формирование импульсов управления для тиристорных ключей 35 и 36 осуществляют формирователи 33 и 34 импульсов. Входные сигналы формирователей 33 и 34 поступа- ют от блоков 31 и 32 ограничения фазы, обеспечивающих регулирование управляющих сигналов от фазорегуляторо 29 и 30 только при наличии положи5
0
5
0
5
0
5 0 5
тельного напряжения на анодах тиристорных ключей 35 и 36.
. Таким образом, в режиме тяги источник 26 смещения устанавливает начальную фазу сигналов управления относительно фазы напряжения несущей частоты преобразователя 39 на УГОЛ oL тг и при увеличении сигнала управления производит его регулирование от cJt ТТ до uJt С)то яе о -то угол, ограниченньш блоками 31 и 32, ув.ели- чивая тем самым величину тока через тиристорные ключи 35 и 36, при этом уменьшается ток возбуждения регулируемого двигателя и, соответственно, увеличивается его нагрузка.
В режиме рекуперативного торможения с помощью инверторов 19 и 20 сигналы управления меняют свою полярность, а источником 28 смещения устанавливается начальная фаза сигналов управления на угол d , при этом при отсутствии сигналов управления тиристорные ключи открыты в диапазоне от cji дос.ТГ . При увеличении инвертированного сигнала управления производится регулирование угла открытия тиристоров тиристорных ключей 35 и 36 oTijLit до tjJt ТГ , что приводит к уменьшению тока через тиристорные ключи 35 и 36 и к увеличению тока возбуждения регулируемого двигателя а следовательно, к увеличению его нагрузки.
Таким образом, устройство для выравнивания нагрузок тяговых электродвигателей может применяться в режимах тяги и рекуперативного торможения за счет изменения алгоритма работы тиристоров тиристорных ключей.
Использование предлагаемого устройства позволяет улучшить распределение тяговых и тормозных усилий на 10-12%, за счет этого снизить на 0,2- 0,4% расход энергии на тягу поездов и увеличить возврат электроэнергии на 0,3-0,5% в режиме рекуперативного торможения.
Фие.г
Составитель Н. Лысяков Редактор В. Петраш Техред И Попрвич Корректор С. Черни
Заказ 2734/19 . Тираж 647Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-иолиг рафическое предприятие, г. Ужгород, ул. Проркт({ая, 4
Фи9.1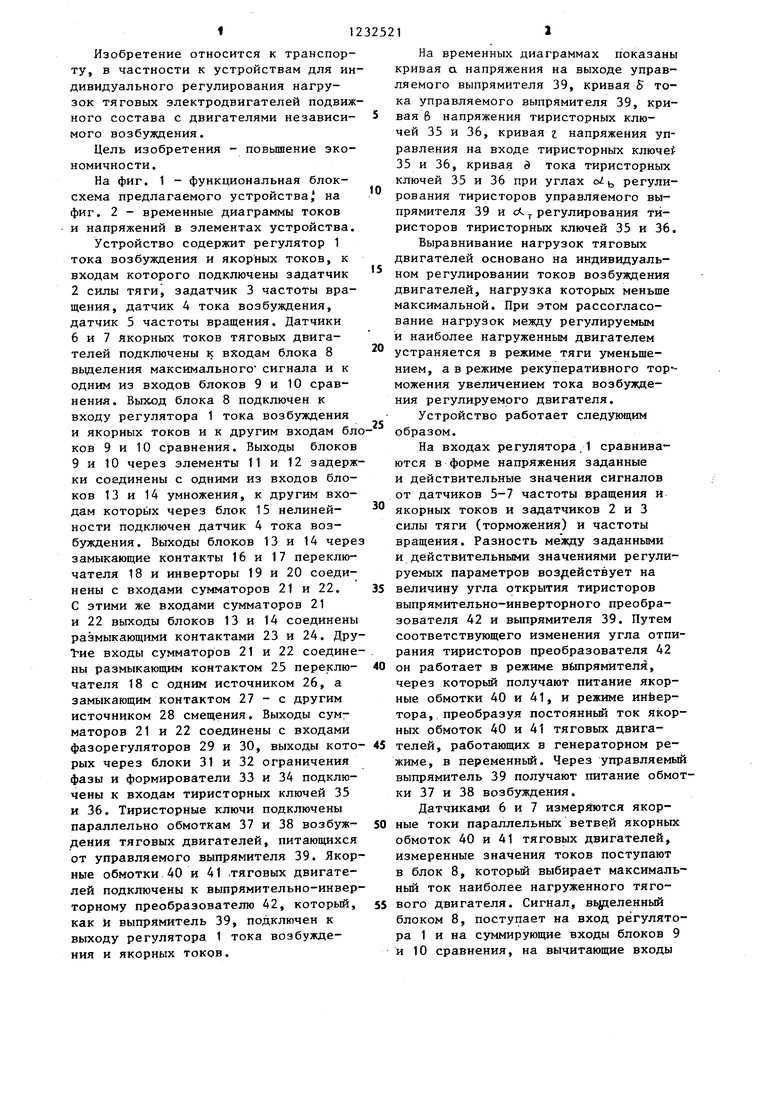
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1646921A2 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1595707A2 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННО-ПОСТОЯННОГО ТОКА | 1990 |
|
RU2026209C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМИ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2349466C2 |
| Устройство для управления электрическим торможением электроподвижного состава переменного тока | 1987 |
|
SU1468790A1 |
| Способ защиты тиристорного преобразователя | 1982 |
|
SU1075346A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2399514C1 |
| Устройство для импульсного регулирования скорости электроподвижного состава | 1980 |
|
SU958156A1 |

| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
