Изобретение относится к подъемно- транспортному оборудованию, а именно к системам /для управления торможением спор крана мостового типа.
Целью изобретения являете ; повышение эффективности и надежности.
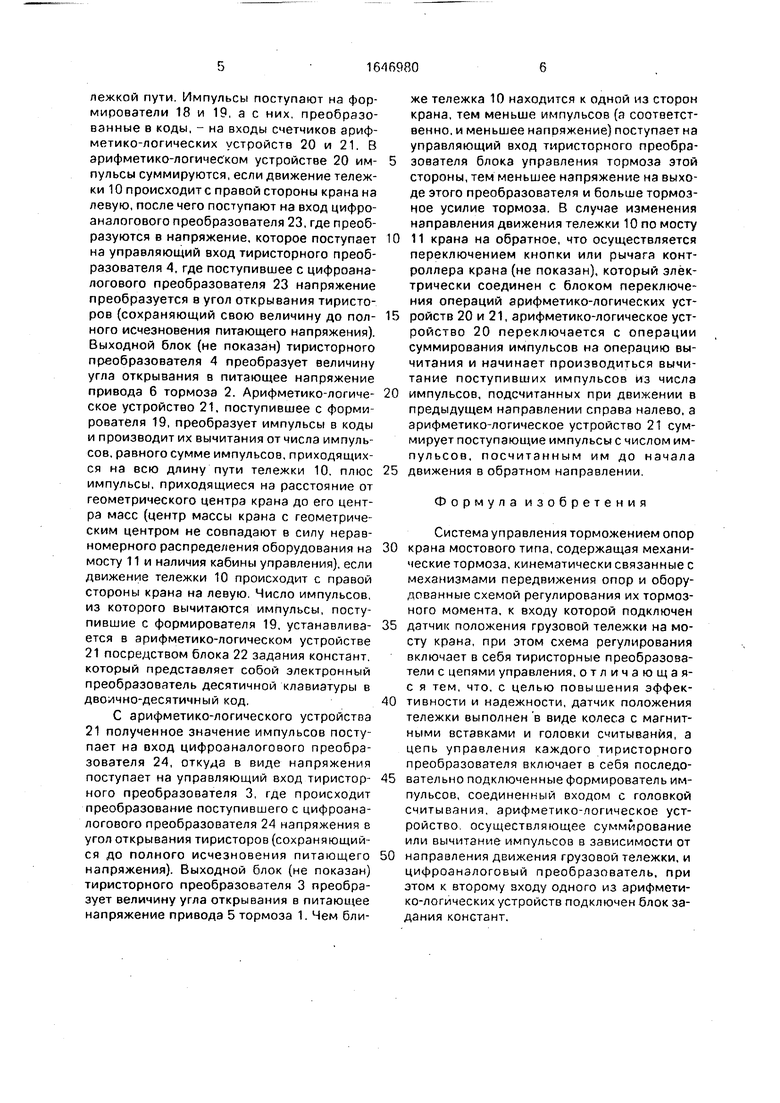
На фиг. 1 изображена блок-схема системы управления торможением опор крана г остового типа; на фиг.2 - мостовой кран, вид сверху; па фиг.З - датчик положения грузовой тележки на мосту крана; на фиг,4 - то же, вид по ходу движения.
Система управления торможением опор крача мостового типа содержит механические тормоза 1 и 2(фиг,1), связанные со схемами регулирования их тормозных усилий, представляющими собой тиристорные преобразователи 3 и 4, подключенные соответственно к обмоткам 5 и б приводов тормозов, кинематически связанные с механизмами 7 и 8 соответственно (фиг.2) передвижения крана. Датчик 9 положения грузовой тележки 10 на мосту 11 крана представляет собой колесо 12 (фиг.З) с магнитными вставками 13 по окружности и магнитную головку 14 считывания импульсов, закрепленную скобой 15 на кронштейне 16, который крепится к тележке 10 так, что датчик 9 находится в средней части тележки 10 и перемещается по рельсу 17. Выход датчика 9 положения грузовой тележки (фиг.1) соединен с входами формирователей 18 и 19 импульсов соответственно, выходы которых соединены соответственно с входами арифметико-логического устройства 20, выполняющего операцию суммирования или вычитания импульсов, и арифметико-логического устройства 21, выполняющего операцию вычитания или суммирования импульсов. К входу арифметико-логического устройства 21 подключен блок 22 задания констант. Выход арифметико-логического устройства 20 соединен с входом цифро-аналогового преобразователя 23, выход которого связан с управляющим входом тиристорного преобразователя 4, а выход арифметико-логического устройства 21 соединен с входом
цифро-аналогового преобразователя 24, выход которого связан с управляющим входом тиристорного преобразователя 3.
Система работает следующим образом. В зависимости от положения грузовой
тележки 10 на мосту 11 крана на его опоры воздействуют разные усилия. Опоры при этом испытывают разные сопротивления передвижению. Если не производить регулировку тормозных усилий тормозов 1 и 2 с
учетом положения грузовой тележки 10, то при торможении крана происходит перекос моста 11, что может привести к значительным динамическим нагрузкам в горизонтальной плоскости, вызывающим повышенный износ ходовых колес и рельсов, перенапряжению элементов металлоконструкции.
При торможении крана тормозные усилия тормозов 1 и 2 формируются посредством тиристорных преобразователей 3 и 4 в
зависимости от местоположения тележки 10 на мосту 11 и с учетом смещения центра масс от геометрического центра. Тормозные усилия тормозов 1 и 2 формируются обратно пропорционально числу импульсов, поступивших с арифметико-логических устройств 20 и 21 на цифро-аналоговые преобразователи 23 и 24, а с них, в виде напряжения, пропорционального импульсам, на управляющие входы тиристорных преобразователей 4 и 3.
Импульсы формируются следующим образом.
Датчик 9 положения грузовой тележки 10, представляющий собой колесо 12с магнитными вставками 13 и магнитную головку
14 считывания, при передвижении тележки
10 по рельсам 17 выдает импульсы, число
которых пропорционально пройденному тележкой пути. Импульсы поступают на формирователи 18 и 19, а с них, преобразованные в коды, - на входы счетчиков арифметико-логических устройств 20 и 21. В арифметико-логическом устройстве 20 импульсы суммируются, если движение тележки 10 происходите правой стороны крана на левую, после чего поступают на вход цифро- аналогового преобразователя 23, где преобразуются в напряжение, которое поступает на управляющий вход тиристорного преобразователя 4, где поступившее с цифроана- логового преобразователя 23 напряжение преобразуется в угол открывания тиристоров (сохраняющий свою величину до полного исчезновения питающего напряжения). Выходной блок (не показан) тиристорного преобразователя 4 преобразует величину угла открывания в питающее напряжение привода 6 тормоза 2. Арифметико-логическое устройство 21, поступившее с формирователя 19, преобразует импульсы в коды и производит их вычитания от числа импульсов, равного сумме импульсов, приходящихся на всю длину пути тележки 10. плюс импульсы, приходящиеся на расстояние от геометрического центра крана до его центра масс (центр массы крана с геометрическим центром не совпадают в силу неравномерного распределения оборудования на мосту 11 и наличия кабины управления), если движение тележки 10 происходит с правой стороны крана на левую. Число импульсов, из которого вычитаются импульсы, поступившие с формирователя 19, устанавливается в арифметико-логическом устройстве 21 посредством блока 22 задания констант, который представляет собой электронный преобразователь десятичной клавиатуры в двоично-десятичный код.
С арифметико-логического устройства 21 полученное значение импульсов поступает на вход цифроаналогового преобразователя 24, откуда в виде напряжения поступает на управляющий вход тиристорного преобразователя 3, где происходит преобразование поступившего с цифроаналогового преобразователя 24 напряжения в угол открывания тиристоров (сохраняющийся до полного исчезновения питающего напряжения). Выходной блок (не показан) тиристорного преобразователя 3 преобразует величину угла открывания в питающее напряжение привода 5 тормоза 1. Чем ближе тележка 10 находится к одной из сторон крана, тем меньше импульсов (а соответственно, и меньшее напряжение) поступает на управляющий вход тиристорного преобразователя блока управления тормоза этой стороны, тем меньшее напряжение на выходе этого преобразователя и больше тормозное усилие тормоза. В случае изменения направления движения тележки 10 по мосту
11 крана на обратное, что осуществляется переключением кнопки или рычага контроллера крана (не показан), который электрически соединен с блоком переключения операций арифметико-логических устройств 20 и 21, арифметико-логическое устройство 20 переключается с операции суммирования импульсов на операцию вычитания и начинает производиться вычитание поступивших импульсов из числа
импульсов, подсчитанных при движении в предыдущем направлении справа налево, а арифметико-логическое устройство 21 суммирует поступающие импульсы с числом им- пульсов, посчитанным им до начала
движения в обратном направлении.
Формула изобретения
Система управления торможением опор
крана мостового типа, содержащая механические тормоза, кинематически связанные с механизмами передвижения опор и оборудованные схемой регулирования их тормозного момента, к входу которой подключен
датчик положения грузовой тележки на мосту крана, при этом схема регулирования включает в себя тиристорные преобразователи с цепями управления, отличающая- с я тем, что, с целью повышения зффективности и надежности, датчик положения тележки выполнен в виде колеса с магнитными вставками и головки считывания, а цепь управления каждого тиристорного преобразователя включает в себя последовательно подключенные формирователь импульсов, соединенный входом с головкой считывания, арифметико-логическое устройство осуществляющее суммирование или вычитание импульсов в зависимости от
направления движения грузовой тележки, и цифроанэлоговый преобразователь, при этом к второму входу одного из арифметико-логических устройств подключен блок задания констант.
Фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для равномерного нагружения механизмов передвижения опор крана мостового типа | 1983 |
|
SU1188088A1 |
| Устройство для управления торможением механизмов передвижения крана мостового типа | 1989 |
|
SU1691272A1 |
| Тренажер крановщика | 1983 |
|
SU1108484A1 |
| СПОСОБ КОНТРОЛЯ КРИТИЧЕСКОГО СОСТОЯНИЯ ПОДВИЖНОГО СОСТАВА НА РЕЛЬСОВОМ ПУТИ И РЕГИСТРАЦИИ ЕГО СХОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399524C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| Механизм передвижения крана мостового типа | 1982 |
|
SU1071569A1 |
| Устройство контроля за электромагнитным приводом постоянного тока тормоза | 1982 |
|
SU1075031A1 |
| Вентильный электропривод | 1989 |
|
SU1758822A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления торможением опор крана мостового типа. Цель - повышение эффективности и надежности. Система содержит механические тормоза 1 и 2, тири- сторные преобразователи 3 и 4, датчик 9
/
16
П
I:
1/15 Ъ
| Устройство для управления торможением опор крана мостового типа | 1983 |
|
SU1093682A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
