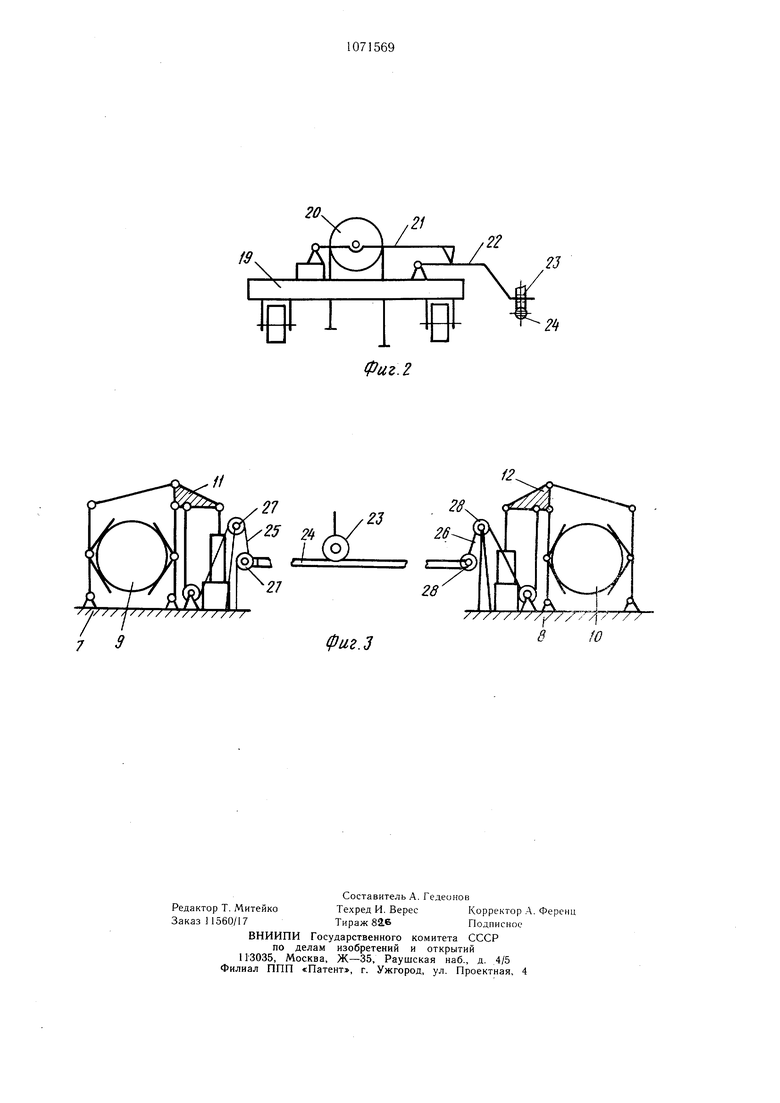
Изобретение относится к подъемно-транепортиому машиностроению, а именно к механизмам передвижения кранов мостового тина. Известен механизм нередвижения крана мостового тина, содержащий двигатели, кинематически соединенные с приводными колесами ходовых тележек крана, механическими тормозами с нриводными звеньями и маховиками с регулируемыми моментами инерции, причем подвижные звенья маховиков с регулируемыми моментами инерции кинематически соединены с грузовой тележкой крана, имеющей возможность перемещения по пути 1. Недостатком известного механизма является сравнительно низкая надежность, обусловленная отсутствием информации о весе груза при управлении механизмом. Цель изобретения - повыщение надежности механизма путем уменьщения перекоса моста крана. Указанная цель достигается тем, что механизм передвижения крана мостового тина, содержаи-1ий двигатели, кинематически соединенные с приводными колесами ходовых тележек крана, механическими тормозами с приводными звеньями и маховиками с регулируемыми моментами инерции, причем подвижные звенья маховиков с регулируемыми моментами инерции кинематически соединены с грузовой тележкой крана, имеющей возможность перемещения по пути, снабжен направляющей балкой, расположенной вдоль пути грузовой тележки крана, отклоняющими блоками, установленными на металлоконструкции крана по обе стороны балки, гибкими органами, одни .концы которых связаны с приводными звень ями механических тормозов, в средней части гибкие органы соединены с указанными блоками, а на других концах гибких органов нодвещена направляющая балка, которая снабжена рычагами, одни концы которых щарнирно соединены с грузовой тележкой крана, а другие концы обоих рычагов установлены друг на друге с перекрытием, и роликом, смонтированным на перекрытом рычаге и установленным на направляющей оалке, причем рычаг с перекрывающим концом снабжен блоком механизма подъема грузовой тележки. На фиг. 1 изображена кинематическая схема механизма передвижения крана мостового типа; на фиг. 2 - грузовая тележка крана, вид спереди; на фиг. 3 - кинематическая связь рычага с механическим тормозом. Механизм передвижения крана мостового типа содержит двигатели 1 и 2, соединенные через редукторы 3 и 4 с приводными колесами 5 и 6 ходовых тележек 7 и 8 крана, с .механическими тормозами 9 и 10, выполненными с приводными звеньями 11 и 12 и с маховиками 13 и 14 с регулируемыми моментами инерции, подвижные звенья 15 и 16 которых посредством гибких связей 17 и 18 соединены с грузовой тележкой 19, перемещающейся по пути вдоль моста крана. Блок 20 механизма подъема тележки 19 смонтирован на рычаге 21, щарнирно установленном вместе с рычагом 22 на тележке 19 и перекрывающим последний. На рычаге 22 закреплен ролик 23, опирающийся на направляющую балку 24, расположенную вдоль цути тележки 19 и соединенную с двух сторон с по.мощью гибких органов 25 и 26 с приводными звеньями 1 и 12 тормозов 9 и 10. Гибкие органы 25 и 26 связаны с отклоняющими блоками 27 и 28, смонтированными на металлоконструкции крана. Механизм нередвижения крана мостового типа работает следующим образом. При пере.мещении тележки 19 вдоль пути с г10мощ)Ю гибких связей 17 и 18 изменяется момент инерции маховиков 13 и 14. В зависимости от веса груза и положения тележки 19 на приводные звенья 11 и 12 тормозов 9 и 10 со стороны блока 20 механизма подъема действует соответствующее по величине усилие, что позволяет уменьшить тормозной момент тормоза со стороны нагруженной ходовой тележки 8 и увеличить со стороны разгруженной ходовой тележки 7, благодаря чему стабилизируется движение крана независимо от положения грузовой тележки 19 и веса груза, Таким образом, механизм передвижения крана в неустановившемся и установивще.мся режимах позволяет равномерно загружать приводы ходовых тележек, что снижает перекос моста крана, повьппает точность остановки крана и его надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОСТОВОЙ КРАН | 2004 |
|
RU2279397C1 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1988 |
|
SU1749159A1 |
| ТЕЛЕЖКА ГРУЗОВАЯ КРАНОВ МОСТОВОГО ТИПА | 2005 |
|
RU2317246C2 |
| Кран для гидротехнических затворов | 1988 |
|
SU1602851A1 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1988 |
|
SU1696373A1 |
| Грузовая тележка для крана мостового типа | 1975 |
|
SU517554A1 |
| СПОСОБ ЗАМЕНЫ ХОДОВЫХ КОЛЕС БАЛАНСИРНЫХ ТЕЛЕЖЕК МОСТОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2483017C2 |
| КРАН-БАЛКА ДЛЯ ЗДАНИЙ АРОЧНОГО ТИПА | 2004 |
|
RU2257333C1 |
| ГРУЗОВАЯ ТЕЛЕЖКА МОСТОВОГО КРАНА | 2003 |
|
RU2230019C1 |
| КРАН-БАЛКА ДЛЯ ЗДАНИЙ АРОЧНОГО ТИПА | 2004 |
|
RU2259316C1 |
МЕХАНИЗМ ПЕРЕДВИЖЕНИЯ КРАНА МОСТОВОГО ТИПА, содержащий двигатели, кинематически соединенные с приводными колесами ходовых тележек , механическими тормозами с ириводными звеньями и маховиками с регулируемыми моментами инерции, причем подвижные звенья маховиков с регулируемыми моментами инерции кинематически соединены с 1 fe . J грузовой тележкой крана, имеющей воз.можнось перемещения по пути, отличающийся тем, что, с целью повьциения надежности уменьшения перекоса моста крана, он снабжен направляющей балкой, расположенной вдоль пути грузовой тележки крана, отклоняющими блоками, установ.1С11Н1)1мп на металлоконструкции крана по обе стороны балки, гибкими органами, одни концы которых связаны с фИВОДНЫМИ звеньями механических тормозов, в средней части 11|бкие органы соединены с указанными блоками, а на других концах гибких органов подвешена направляющая балка, которая снабжена рычага.ми, одни концы которых 1нарнирно соединены с грузовой тележкой крана, а другие концы обоих рыш (Л чагов yciaHOB.icHbi друг на друге с перекрытием, н роликом, смонтированным на перекрыгом рычаге и установленным на направляющей балке, причем рычаг с перекрывающим концом снабжен б, механизма подъема гру.чоноГ TC.IOKKH. о ел о: со Фа. 1
25 24 I (О фиг.З ////// //J /TT // 8/О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для стабилизации движения крана мостового типа | 1976 |
|
SU616222A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
