1
(21)4652309/03
(22)21.02.89
(46) 07.05.91. Бюл. № 17
(71)Московское научно-производственное объединение по строительному и дорожному машиностроению
(72)С.В.Борисов, М.А.Ватуев, Л.С.Каминский, В.А.Левандовский, В.А.Романцов и В.Е.Руфов
(53) 621.878.2 (088.8) (56) Колышев В.И., Марышев Б.С., Рихтер В.А. и др. Основы автоматизации в дорожном строительстве. - М.: Транспорт, 1987.
Grad-Line Corporation. Проспект фирмы (Telex: 32-8878, Washington 98072.USA). - S 276 Slope Control. Operation and Service Manual (0400- 237), 1985, p. 1-19, ft.1.3 (Slope Sensor).
(54) УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ЗЕМЛЕРОЙНО-ТРАНСПОРТ- НОЙ МАШИНЫ
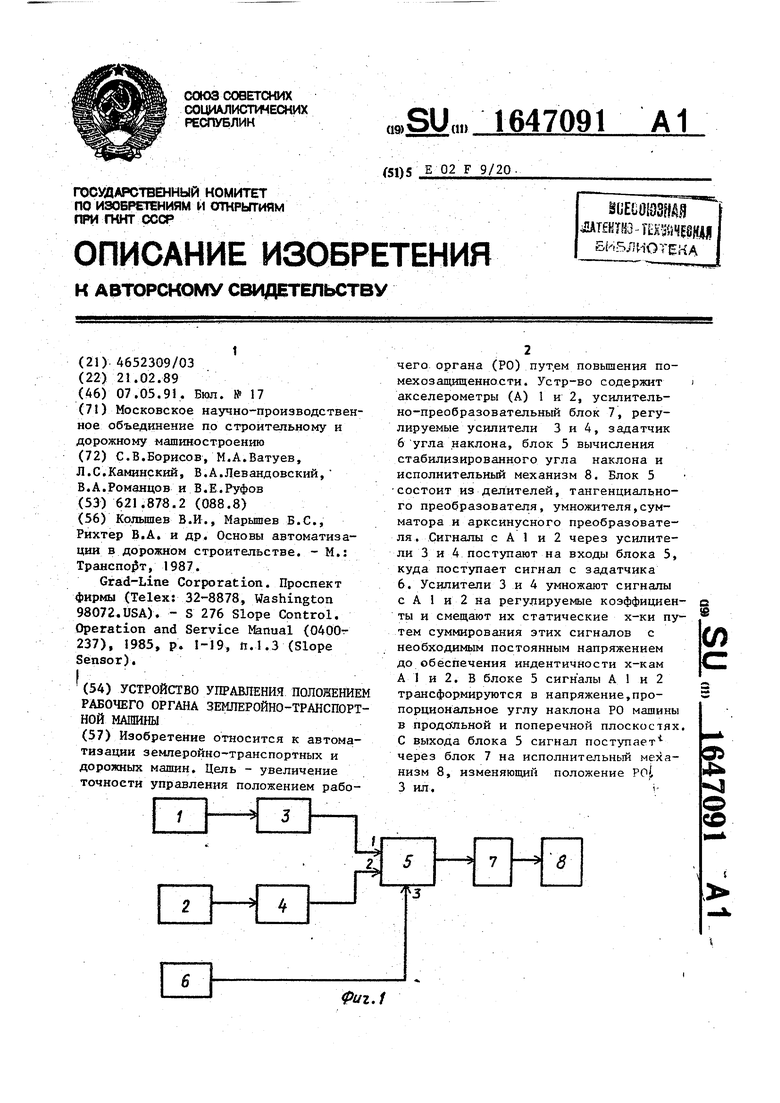
(57) Изобретение относится к автоматизации землеройно-транспортных и дорожных машин. Цель - увеличение точности управления положением рабочего органа (РО) путем повышения помехозащищенности. Устр-во содержит акселерометры (А) 1 и 2, усилительно-преобразовательный блок 7, регулируемые усилители 3 и 4, задатчик 6 угла наклона, блок 5 вычисления стабилизированного угла наклона и исполнительный механизм 8. Блок 5 состоит из делителей, тангенциального преобразователя, умножителя,сумматора н арксинусного преобразователя . Сигналы с А 1 и 2 через усилители 3 и 4 поступают на входы блока 5, куда поступает сигнал с задатчика 6. Усилители 3 и 4 умножают сигналы с А 1 и 2 на регулируемые коэффициенты и смещают их статические х-ки путем суммирования этих сигналов с необходимым постоянным напряжением до обеспечения индентичности х-кам А 1 и 2. В блоке 5 сигналы А 1 и 2 трансформируются в напряжение,пропорциональное углу наклона РО машины в продольной и поперечной плоскостях. С выхода блока 5 сигнал поступает1 через блок 7 на исполнительный механизм 8, изменяющий положение POl 3 ил.
(Я
ф
Ј
2 со
Изобретение относится к системам автоматизации землеройно- транспортных и дорожных машин, в частности к устройствам управления положением pa- бочих органов.
Целью изобретения является увеличение точности путем повышения помехозащищенности (невоэмущаемости ускорениями).
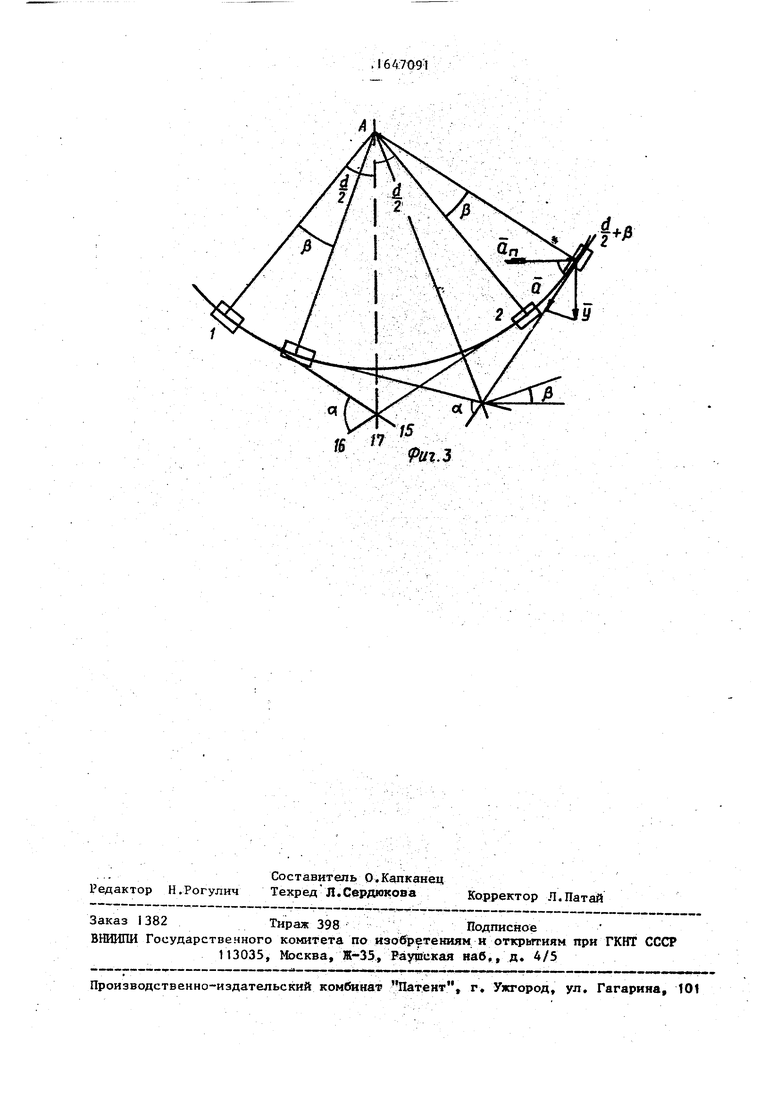
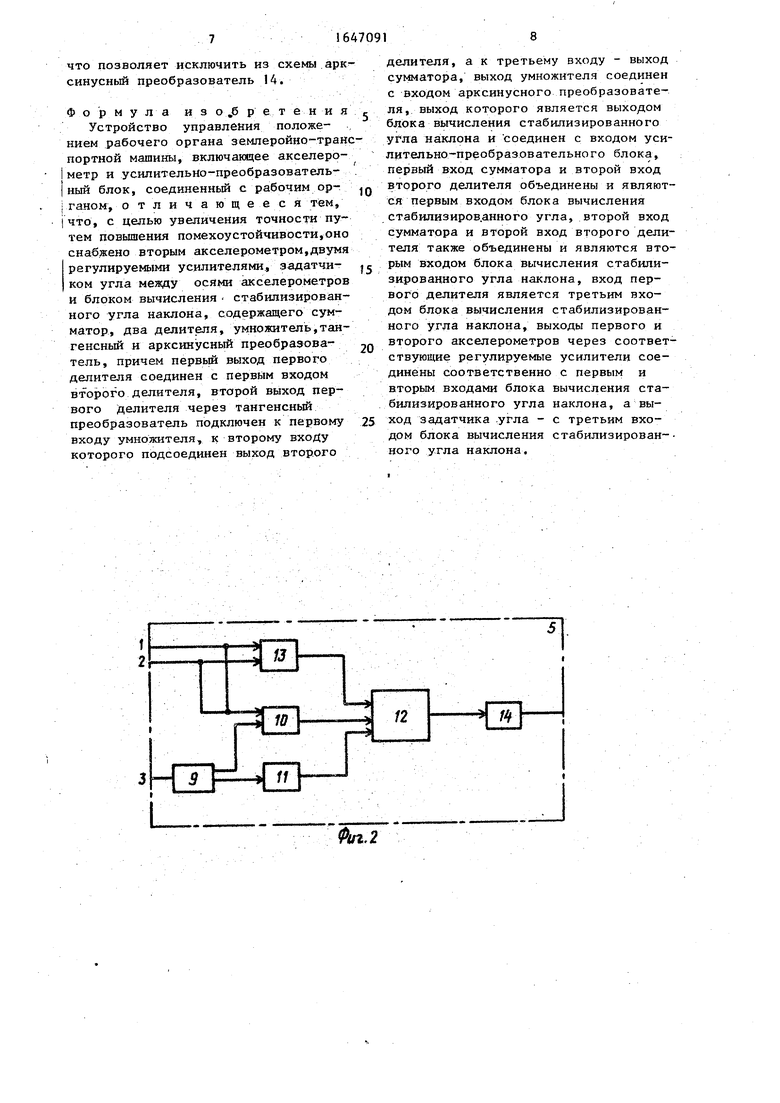
На фиг.1 представлена функциональная схема устройства управления положением рабочего органа землеройно- транспортной машины; на фиг.2 - схема блока вычисления стабилизированно- го угла наклона; на фиг.З - пространственная ориентация маятниковых акселерометров .
Устройство управления положением рабочего органа ЗТМ включает первый 1 и второй 2 идентичные маятниковые акселерометры, закрепленные на рабочем органе и соединенные соответственно с первым 3 и вторым 4 регулируемыми усилителями, которые осуще- ствляют умножение сигналов с акселерометров на регулируемые коэффициенты и смещение их статических характеристик путем суммирования этих сигналов с необходимым постоянным напряжением до обеспечения идентичности характеристик акселерометров. Усилитель 3 подключен к первому входу блока 5 вычисления стабилизированного угла наклона, а усилитель 4 - к второму входу блока 5, к третьему входу которого подключен задатчик 6 . угла между осями чувствительности акселерометров 1 и 2. Выход блока 5 подключен через усилительно-преобра- зевательный блок 7 к исполнительному механизму 8, имеющему возможность изменять угловое положение рабочего органа.. Блок 5 вычисления стабилизированного угла наклона.содержит пер- вый делитель 9, соединенный одним выходом с первым входом второго делителя 10, а другим выходом - через тангенсальный преобразователь 11 с первым входом умножителя 12, к второ- му входу которого подключен выход второго делителя 10, сумматор 13 соединен с третьим входом умножителя 12, выход которого подключен к арк- синусному преобразователю 14, выход которогб является выходом блока 5, при этом первый вход сумматора 13 и второй вход второго делителя 10 объединены и являются первым входом блока 5, и второй вход сумматора 13 и второй вход второго делителя 10 объединены и являются вторым входом ело- | ка 5, первым входом которого является вход первого делителя.
Устройство работает следующим образом.
При нахождении рабочего органа ЗТМ в горизонтальном положении оси 15 и 16 чувствительности акселерометров 1 и 2 ориентированы в пространстве под заданным углом оЈ друг к другу так, что перпендикуляры,опущенные от акселерометров 1, 2 к их осям чувствительности 15 и 16, пересекаются в некоторой точке А под одинаковым углом 06/2 к гравитационной вертикали 17 (фиг.З). Так как статические характеристики акселерометров 1 и 2 одинаковы и центральносимметрич- ны, то в этом случае выходные напряжения U° и U° акселерометров 1 и 2 противоположны по знаку, но равны по модулю некоторому напряжению U.,определяемому из соотношения:
К1 - KI Uo K.g.sin(Oi/2),
. О)
где К - крутизна статической характеристики (чувствительность) акселерометров 1 и 2; g 9,81 м/с - ускорение свободного падения.
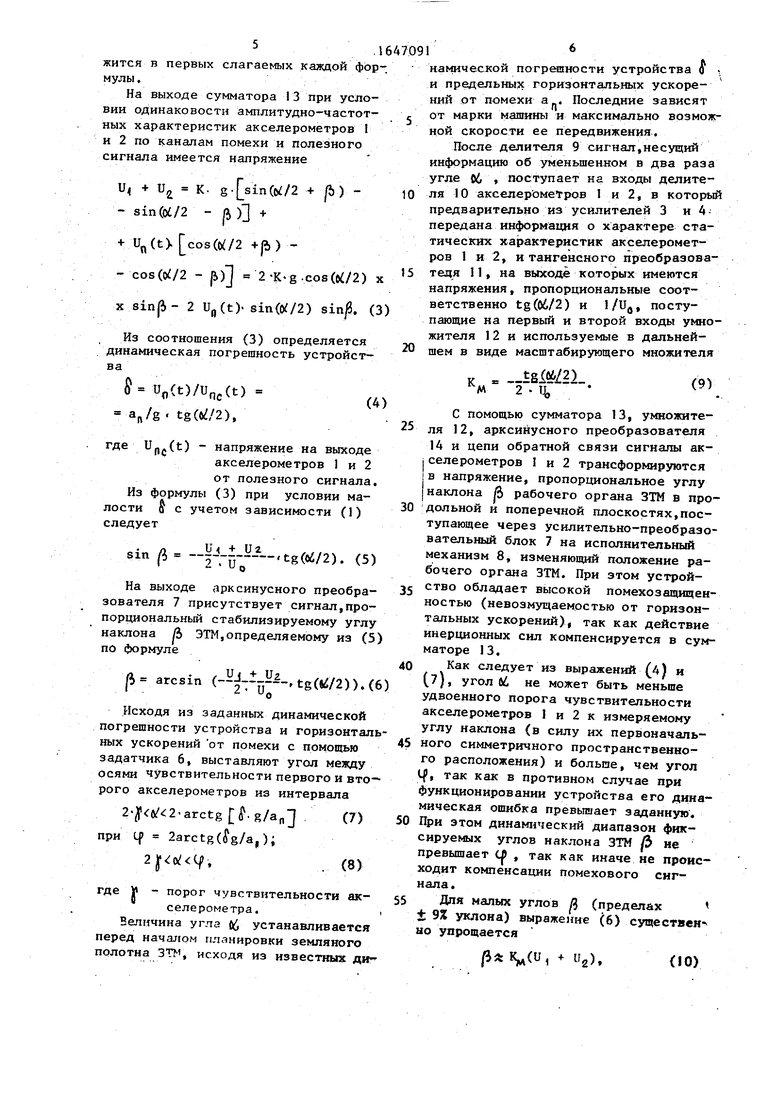
Если при движении ЗТМ (т.е. в слу- чае воздействия продольной помехи) необходимо стабилизировать угол наклона рабочего органа машины на уровне; равном заданному углу (Ъ , из выхода акселерометров 1 и l имеются соответственно напряжения Uj и Ug, определяемые из зависимостей
U K-g-sin(o6/2 +/i) + + Un(t) . cos(oЈ/2 +|i)
U2 -K g sin(X/2 - /3) - - UB(t). cos(tf/2 - p)
где U„(t) - сигнал от помехи (горизонтального ускорения а0 зависящий от времени t.
В соотношениях (2) полочный сигнал от ускорения а 4 g sin( +),несущий информацию об угле наклона /3 транспортного средства относительно гравитационной вертикали 17, содер(2)
51647091
жится в первых слагаемых каждой формулы .
На выходе сумматора 13 при условии одинаковости амплитудно-частотных характеристик акселерометров 1 и 2 по каналам помехи и полезного сигнала имеется напряжение
Р
U, + U2 К- ((y:/2 +
-sin(oi/2 - р ) +
+ Un((tf/2 +fb) -cos(tf/2 - fj) т 2-K-g.cos(tf/2) x x sinji- 2 Uq(t)- sin(x72) sin/3. (3)
Из соотношения (З) определяется динамическая погрешность устройства
# un(t)/unc(t)
tg(tf/2),
aa/g
где
unc(t) напряжение на выходе акселерометров 1 и 2 от полезного сигнала. Из формулы (3) при условии малости о с учетом зависимости (1) следует
2 - U
иг
(oi/2). (5)
На выходе арксинусного преобразователя 7 присутствует сигнал,пропорциональный стабилизируемому углу наклона и ЭТМ,определяемому из (5) по формуле
р- arcsin (,tg(tf/2)).(6
Исходя из заданных динамической погрешности устройства и горизонтальных ускорений от помехи с помощью задатчика 6, выставляют угол между осями чувствительности первого и второго акселерометров из интервала
2-J 2-arctg f.g/an (7) при Cf 2arctg(Јg/a,);
2Jf«X tf.. (8)
где
ак- порог чувствительности селерометра..
Величина угла (Ј устанавливается перед началом планировки земляного полотна ЗТМ, исходя из известных ди
5
0
намической погрешности устройства о и предельных горизонтальных ускорений от помехи ап Последние зависят от марки машины и максимально возможной скорости ее передвижения.
После делителя 9 сигнал,несущий информацию об уменьшенном в два раза угле Сб поступает на входы делителя 10 акселерометров 1 и 2, в который предварительно из усилителей 3 и 4- передана информация о характере статических характеристик акселерометров 1 и 2, и тангенсного преобразователя 11, на выходе которых имеются напряжения, пропорциональные соответственно tg(Oi/2) и l/Ue, поступающие на первый и второй входы умножителя 12 и используемые в дальнейшем в виде масштабирующего множителя
.
25
)
35
40
К
м
t§M2) 2- Ц,
(9)
С помощью сумматора 13, умножителя 12, арксинусного преобразователя 14
и цепи обратной связи сигналы акселерометров 1 и 2 трансформируются в напряжение, пропорциональное углу наклона |5 рабочего органа ЗТМ в про30 дольной и поперечной плоскостях,поступающее через усилительно-преобразовательный блок 7 на исполнительный механизм 8, изменяющий положение рабочего органа ЗТМ. При этом устройство обладает высокой помехозащищенностью (невозмущаемостью от горизонтальных ускорений), так как действие инерционных сил компенсируется в сумматоре 13.
Как следует из выражений (4) и (7), угол (Si не может быть меньше удвоенного порога чувствительности акселерометров 1 и 2 к измеряемому углу наклона (в силу их первоначаль45 ного симметричного пространственного расположения) и больше, чем угол Ц, так как в противном случае при функционировании устройства его динамическая ошибка превышает заданную.
50 При этом динамический диапазон фиксируемых углов наклона ЗТМ /3 не превышает (J) , так как иначе не происходит компенсации помехового сигнала.
55 Для малых углов ft (пределах Ј 9% уклона) выражение (6) существен но упрощается
a.
(10)
что позволяет исключить из схемы арк- синусный преобразователь 14.
Формула изобретения
Устройство управления положением рабочего органа землеройно-транс портной машины, включающее акселеро- I метр и усилительно-преобразователь- |ный блок, соединенньй с рабочим op- , ганом, отличающееся тем, |что, с целью увеличения точности путем повышения помехоустойчивости,оно снабжено вторым акселерометром,двумя регулируемыми усилителями эадатчи- ком угла между осями акселерометров и блоком вычисления - стабилизированного угла наклона, содержащего сумматор, два делителя, умножитель,тан- генсный и арксинусный преобразова- тель, причем первый выход первого делителя соединен с первым входом второго делителя, второй выход первого делителя через тангенсный преобразователь подключен к первому входу умножителя, к второму входу которого подсоединен выход второго
делителя, а к третьему входу - выход сумматора, выход умножителя соединен с входом арксинусного преобразователя, выход которого является выходом блока вычисления стабилизированного угла наклона и соединен с входом усилительно-преобразовательного блока, первый вход сумматора и второй вход второго делителя объединены и являются первым входом блока вычисления стабилизиров.анного угла, второй вход сумматора и второй вход второго делителя также объединены и являются вторым входом блока вычисления стабилизированного угла наклона, вход первого делителя является третьим входом блока вычисления стабилизированного угла наклона, выходы первого и второго акселерометров через соответствующие регулируемые усилители соединены соответственно с первым и вторым входами блока вычисления стабилизированного угла наклона, а выход задатчика угла - с третьим входом блока вычисления стабилизирован-- ного угла наклона.
Й/г.З
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ АВТОГРЕЙДЕРА | 2006 |
|
RU2327011C2 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ В ПРОЦЕССЕ КОПАНИЯ ГРУНТА | 2006 |
|
RU2327010C2 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Стабилизированная трехфазная система питания | 1988 |
|
SU1603352A1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |