л и ч аю щи и с я тем, что, с целью упрощения механизма и облегчення управления трактором, механизм имеет только один рычаг управления, помещенный в подвижном корпусе, который может совершать перемещения относительно неподвижного корпуса, жестко нрикрепленного к раме трактора.
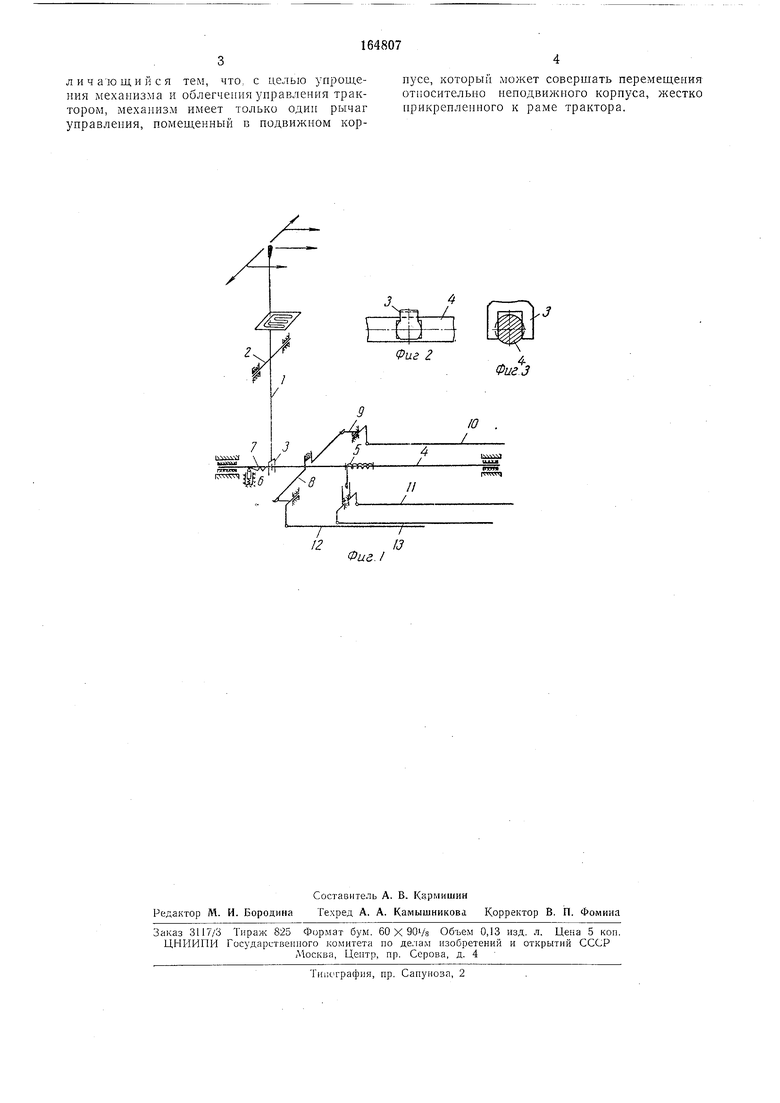
Фиг./
