Изобретение относится к машиностроению и может быть использовано для автоматизации сборочных процессов.
Цепь изобретения - снижение затрат за счет исключения из состава робототехниче- схого комплекса систем технического зрения и ЭВМ.
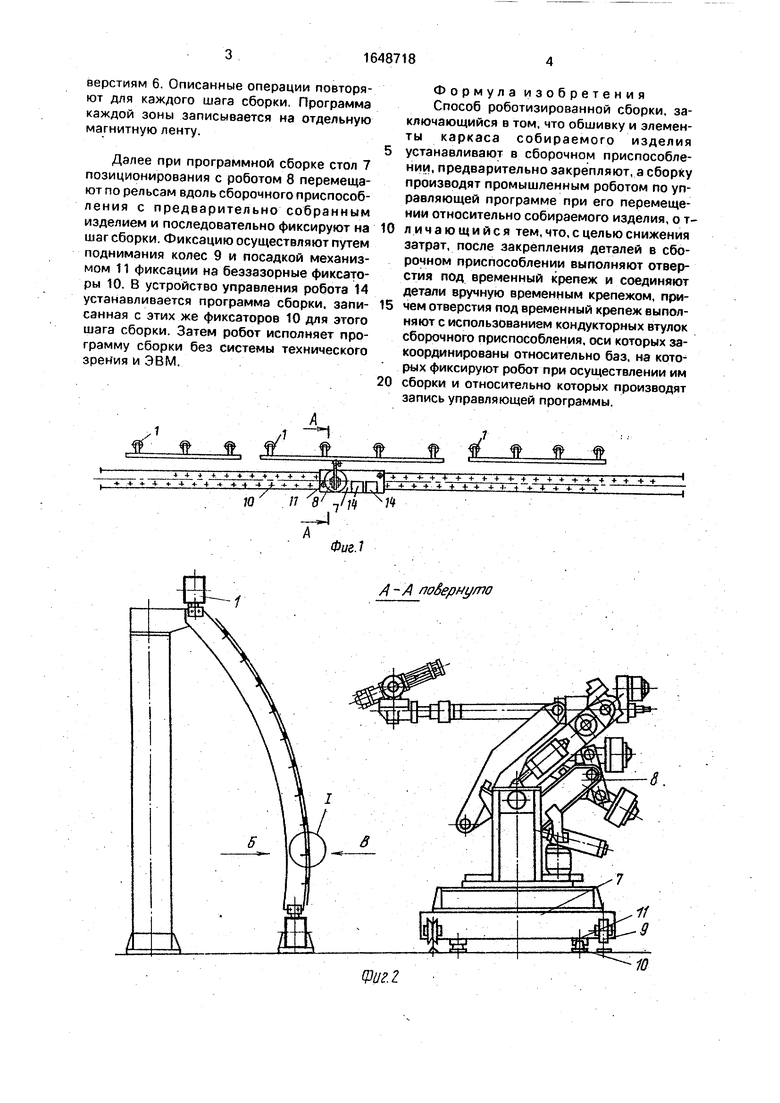
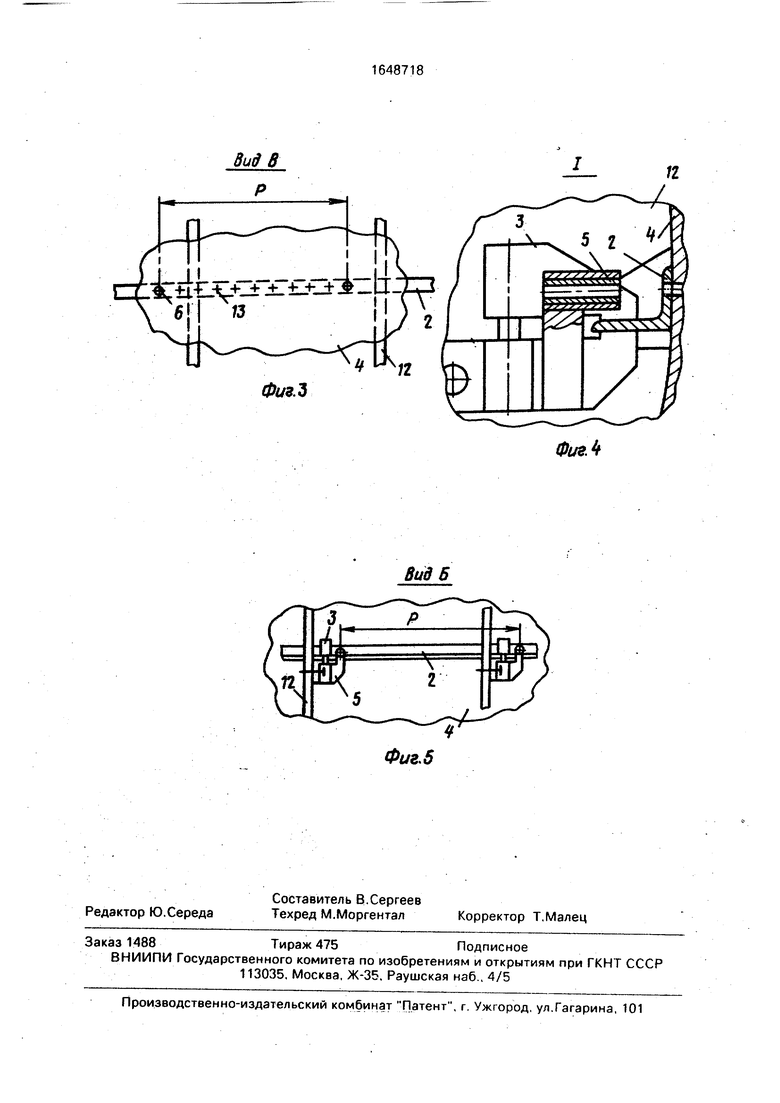
На фиг. 1 изображен робототехнический комплекс, предназначенный для реализации предлагаемого способа сборки; на фиг.2 - сечение А-А на фиг.1; на фиг.З - вид В на фиг.2: на фиг.4 - узел I на фиг.2: на фиг.5 - вид Б на фиг.2.
Способ осуществляется следующим образом.
В сборочное приспособление 1 устанавливают элементы каркаса - стрингеры 2 и закрепляют прижимами 3. Затем устанавливают обшивку 4. После этого через кондукторные втулки 5 сверлят отверстие 6 в стрингере 2 и обшивке 4. Таким образом на наружной поверхности панели формируется исходная информация для программирования.
Для программирования стол 7 позиционирования с роботом 8 перемещают по рельсам и, например, от путевого датчика останавливают около зоны сборки. Стол позиционирования опускается за счет подь- ема колес 9 и садится на фиксаторы 10 транспортного пути своим механизмом 11 фиксации. Беззазорность посадки стола 7 позиционирования обеспечивается механизмом 11 фиксации. Размер зоны сборки выбирается таким образом, чтобы отклонения устанавливаемых элементов каркаса 2 за счет их неточности и нежесткости в сумме с погрешностями расположения отверстий, выполненных роботом по программе сборки, не превышали установленных значений. Практически это будет зона между двумя ложементами 12 (размер Р) Выполнение отверстий 6 под временный крепзж по кондукторным втулкам и выбор ширины зоны обеспечивают в заданных допусках на размер от оси отверстий 13 стрингера 2 до его края, так называемую перемычку. Программируют робот методом обучения по отсл
с
о
00
верстиям 6. Описанные операции повторяют для каждого шага сборки, Программа каждой зоны записывается на отдельную магнитную ленту.
Далее при программной сборке стол 7 позиционирования с роботом 8 перемещают по рельсам вдоль сборочного приспособ- ления с предварительно собранным изделием и последовательно фиксируют на шаг сборки. Фиксацию осуществляют путем поднимания колес 9 и посадкой механизмом 11 фиксации на беэзазорные фиксаторы 10. В устройство управления робота 14 устанавливается программа сборки, записанная с этих же фиксаторов 10 для этого шага сборки. Затем робот исполняет программу сборки без системы технического зрения и ЭВМ.
Формула изобретения Способ роботизированной сборки, заключающийся в том, что обшивку и элементы каркаса собираемого изделия
устанавливают в сборочном приспособлении, предварительно закрепляют, а сборку производят промышленным роботом по управляющей программе при его перемещении относительно собираемого изделия, о тличающийся тем, что, с целью снижения затрат, после закрепления деталей в сборочном приспособлении выполняют отверстия под временный крепеж и соединяют детали вручную временным крепежом, причем отверстия под временный крепеж выполняют с использованием кондукторных втулок сборочного приспособления, оси которых за- координированы относительно баз, на которых фиксируют робот при осуществлении им
сборки и относительно которых производят запись управляющей программы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕМОНТА АГРЕГАТА СОТОВОЙ КОНСТРУКЦИИ ВОЗДУШНОГО СУДНА И СТАПЕЛЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2020 |
|
RU2747889C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ СБОРКИ КОСМИЧЕСКИХ АППАРАТОВ | 2024 |
|
RU2824224C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС СБОРКИ КОСМИЧЕСКИХ АППАРАТОВ | 2024 |
|
RU2825164C1 |
| СПОСОБ ЛАЗЕРНОЙ СВАРКИ РЕБРИСТЫХ ПАНЕЛЕЙ | 2015 |
|
RU2605032C1 |
| СПОСОБ СБОРКИ ПАНЕЛЕЙ АГРЕГАТОВ САМОЛЕТА | 2011 |
|
RU2463217C1 |
| СТАПЕЛЬ ДЛЯ СБОРКИ ЦИЛИНДРИЧЕСКИХ И КОНИЧЕСКИХ | 1966 |
|
SU183136A1 |
| АВТОМАТИЗИРОВАННАЯ КОНВЕЙЕРНАЯ ЛИНИЯ ДЛЯ СБОРКИ МЕБЕЛЬНЫХ КОРОБОВ | 2024 |
|
RU2836831C1 |
| УСТРОЙСТВО, СИСТЕМЫ И СПОСОБЫ ДЛЯ СУХОЙ ИЗОТЕРМИЧЕСКОЙ ОБРАБОТКИ И СБОРОЧНЫЕ ПРИСПОСОБЛЕНИЯ ДЛЯ ЗАГОТОВОК | 2007 |
|
RU2417871C2 |
| Створка двигательного отсека мотогондолы вертолета и способ ее изготовления | 2020 |
|
RU2739827C1 |
| СПОСОБ МОДУЛЬНОЙ СБОРКИ КЕССОНА КОНСОЛИ КРЫЛА САМОЛЕТА С ДЕТАЛЯМИ ИЗ УГЛЕРОДНЫХ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ И МЕТАЛЛОВ И СБОРОЧНАЯ ЛИНИЯ С УСТРОЙСТВАМИ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2021 |
|
RU2774870C1 |
Изобретение относится к области машиностроения и может быть использовано для автоматизации сборочных процессов. Цель изобретения - снижение затрат. Способ роботизированной сборки заключается в том, что обшивку и элементы каркаса собираемого изделия устанавливают в сборочном приспособлении, предварительно закрепляют, выполняют отверстия под временный крепеж, соединяют детали вручную временным крепежом и производят сборку роботом по управляющей программе при его перемещении относительно собираемого изделия, причем оси отверстий под временный крепеж и базы, на которых фиксируют робот при осуществлении им сборки, закоордини- рованы между собой. 5 ил.
Фиг Ч
,7
Ц 4- 4 4- -f 4- + + + ++ + + + Т U-t-+4.4-f+ -4-4-f+4- + + -f
N4
А-А побери у/по
Вид В
Фиг.Ъ
Фиг.Ь
Вид 6
Фиг. 5
| Белянин П.Н | |||
| Робототехнические системы для машиностроения | |||
| М.: Машиностроение, 1986, с.144-147. |
