Изобретение относится к авиационной промышленности, а именно к аэродинамическим трубам (АДТ) с магнитным подвесом модели летательного аппарата (ЛА) .
Цель изобретения - повышение точности за счет стабилизации модели по крену и измерения аэродинамического момента вращения модели по углу крена
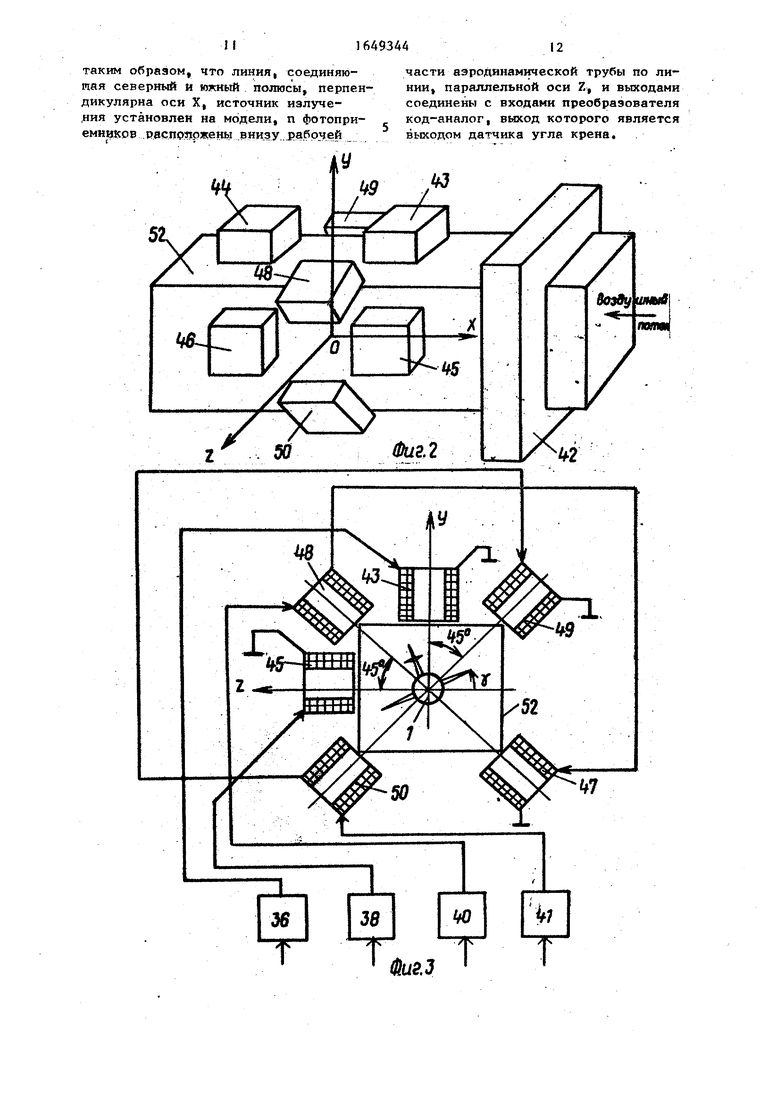
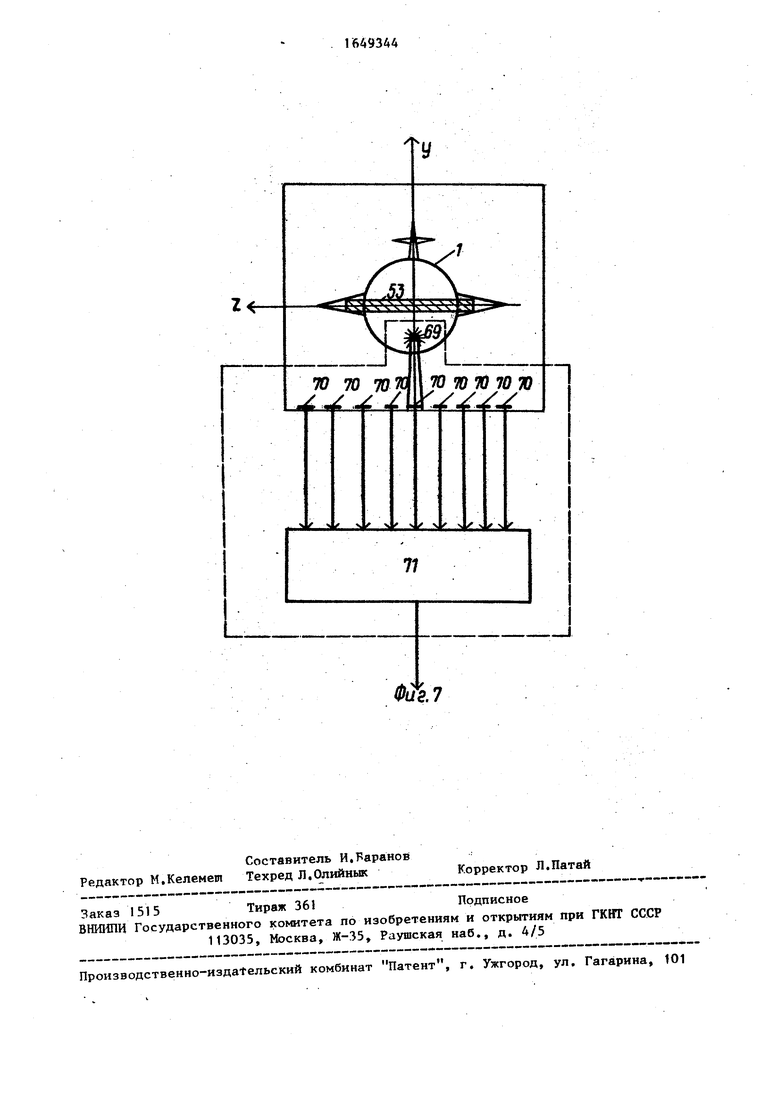
На фиг.1 изображена функциональная схема устройства управления поло жением модели в АДТ; на фиг.2 - установка электромагнитов на АДТ, общий вид; на фиг.З - установка электромагнитов в плоскости YOZ и включение их обмоток в электромагнитную схему; на фиг.4 - установка постоянного магнита в модели ЛА и датчик положения по осям электромагнитов (каналы определения смещения по осям второго и четвертого электромагнитов) ; на фиг.З - установка постоянного магнита в модели ЛА и дат чик положения модели (канала определния смещения по оси X): на фиг.6 - блок-схема датчика положения модели по осям электромагнитов; на фиг.7 - блок-схема датчика угла крена и расположение его в АДТ,
Модель4 W подвещена в электромагнитном поле. Датчик 2 линейного положения модели предназначен для определения смещения (положения) модели в пространстве вдоль осей первого, второго, третьего, четвертого и пятого электромагнитов стабилизации положения модели по оси X, по оси У и углу вращения относительно оси Z, по оси Z и углу вращения относительно оси Y. Датчик 3 угла крена определяет смещение модели по углу крена У . Задатчики 4-8 нулевого положения модели по осям электромагнитов и датчик 3 угла крена соединены с помощью пяти схем сравнения 9-13, усилителей 14-19, дифференциаторов 20-25, сумматоров 26-31, задатчик 32 угла крена, вычитателя 33, сумматора 34, усилителей 35-41 мощности с
5
0
5
0
5
0
5
0
5
электромагнитами 42-50. При этом первый выход датчика 2 положения соединен с первым входом первой схемы 9 сравнения, второй вход которой соединен с задатчиком 4 нулевого положения модели по оси первого электромагнита , а выход - с входом усилителя 14 и дифференциатора 20. Второй выход датчика 2 линейного положения соединен с первым входом второй схемы 10 сравнения, второй вход которой соединен с выходом эадатчика 5 нулевого положения по оси второго электромагнита, а выход соединен с входами второго усилителя 15 и второго дифференциатора 21 Третий выход датчика положения модели соединен с первым входом третьей схемы 11 сравнения, второй вход которой соединен с задатчиком нулевого положения модели по оси третьего электромагнита, а выход - с входом третьего усилителя 16 и третьего дифференциатора 22. Четвертый выход датчика- положения соединен с первым входом четвертой схемы 12 сравнения, второй вход которой соединен с эадатчиком нулевого положения модели по оси четвертого электромагнита, а выход - с входом четвертого усилителя 17 и четвертого дифференциатора 23. Пятый выход датчика положения соединен с первым входом пятой схемы 13 сравнения, второй вход которой соединен с задатчиком нулевого положения модели по оси пятого электромагнита, а выход - с входом пятого усилителя 18 и пятого дифференциатора 24. Выходы усилителя 14 и дифференциатора 20 подсоединены к входам сумматора 26. Выходы усилителя 15 и дифференциатора 20 подсоединены к входам сумматора 27, Выходы усилителя 16 и дифференциатора 22 подсоединены к входам сумматора 28. Выходы усилителя 17 и дифференциатора 23 подсоединены к входам сумматора 29. Выходы усилителя 18 и дифференциатора 24 подсоединены к входам сумматора 30. Выход сумматора подсоеди
5. -164
нен к входу усилителя 35 мощности, выход которого подсоединен к первому электромагниту 42. Выход сумматора 27 подсоединен к- второму электромагниту 43. Выход сумматора 28 подсоединен к входу усилителя 37 мощности, выход которого подсоединен к третьему электромагниту 44. Выход сумматора 29 подсоединен к входу усилителя 38 мощности, выход которого подсоединен к четвертому электромагниту 45. Выход сумматора 30 подсоединен к входу усилителя 39 мощности, выход которого подсоединен к пятому электро магниту 46.
Выход датчика 3 угла крена соединен с входом шестого усилителя I9 и входом шестого дифференциатора 25, выход которого соединен с вторым входом шестого сумматора 31, первый вход которого соединен с выходом шестого усилителя 19, а выход - с первыми входами вычитателя 33 и седьмого сумматора 34, второй вход-которого соединен с выходом источника 51 постоянного напряжения. Выход седьмого сумматора 34 соединен с входом усилителя 41 мощности, выход которого соединен с последовательно соединенными электромагнитами 50 и 49 момента крена. Второй вход вычитателя 33 подсоединен к источнику 51 постоянного напряжения, третий вход вычитателя подсоединен к за- датчику 32 угла крена. Выход вычитателя подсоединен к входу усилителя 40 мощности, выход которого подсоединен к последовательно соединенным электромагнитам 48, 47 крена,
Электромагниты первого 42, второго 43, третьего 44, четвертого 45, пятого 46 и дополнительные пары электромагнитов 47i 48 и 49, 50 расположены вокруг рабочей части трубы 52. Внутри модели 1, имеющей сердечник из ферромагнитного материала, допол- нительно установлен постоянный магнит 53. Канал определения смещения по оси электромагнита. 45 содержит источник 54 излучения, оптически сопряженный с фотоприемником 55, выход которого соединен с входом усили- - теля 56, выход которого является четвертым выходом датчика 2 положения модели. Канал определения смещения по оси электромагнита 43 содержит источник 57 излучения, оптически сопряженный с фотоприемником 58, выход ко
5
,
0
торого соединен с входом усилителя 59, выход которого является вторым выходом датчика 21 положения модели.
Канал определения смещения по оси X содержит источник 60 излучения, оптически сопряженный с фотоприемником 61, соединенным с входом усилителя 62, выход которого является первым выходом датчика 2 линейного положения модели, соответственно источник 63 излучения, фотоприемник 64, усилитель 65 канала определения смещения модели 1 по оси третьего электромагнита 44 и источник 66 излучения, фотоприемник 67, усилитель 68 канала определения смещения модели 1 по оси пятого электромагнита 46.
Датчик 3 угла крена содержит источник 69 излучения, установленный внизу модели 1 ЛА, и ряд (п) фотоприем«- ников 70, установленных в нижней части АДТ и соединенных с входами преобразователя 71 код-аналог. Выход преобразователя код-аналог является выходом датчика 3 угла крена. Число п фотоприемников выбирается в зависимости от размера АДТ и от размеров светочувствительной площадки фотоприемника и определяется по формуле 1
п
s ---, где 1 - ширина АДТ, а - разэ1
5
0
5
0
5
мер стороны светочувствительной площадки фотоприемника; п - число фотоприсмников,
Устройство работает следующим образом,
С помощью электромагнитов 42-46 модель ЛА 1 подвешивается в АДТ в магнитном поле, Лучи света от источников 60,57, 63, 54 и 66 излучения датчика 2 положения модели захватывают края модели ЛА 1 и попадают на фотоприемники 61, 58, 64, 55 и 67 преобразующие оптический сигнал в электрический. Усилители 62, 59, 65, 56, 68 эти сигналы усиливают до необходимой величины. Далее сигналы поступают на схемы сравнения, где сравниваются с сигналами нулевого положения 5, 4, 6, 7, 8, При нахожде- , нии модели 1 ЛА в исходном положении на выходе схем 9-13 сравнения будет нулевой сигнал. При смещении модели под воздействием воздушного потока величина светового потока изменяется, и на выходе схем 9-13 сравнения будут сигналы рассогласования, которые, усиливаясь и дифференцируяс ь в блоках 14-18 и 20-24, попадают в сумматоры 26-30. Далее усилители , 35-39 мощности просуммированный сигнал усиливают и подают на соответ- ствующие электромагниты 42-46, изменяя электромагнитное поле, воздействующее на модель с определенной си- лой, изменяя и силу-воздействия, ко- торая возвращает модель 1 в исходное JQ положение. При возникновении угла крена модели J (под воздействием воз- Душного потока) луч света от источника 69 излучения изменяет свое положение, попадая на соседние фотопри- емники 70, преобразующие оптический сигнал в электрический, С выхода преобразователя 71 код-аналог на выход
датчика крена поступает сигнал Vy пропорциональный углу крена V . При 20 нулевом угле крена Ґ, отсчитываемом от оси Y, к соединенным последовательно попарно катушкам электромагнитов 47, 48, и 49, 50 подводятся одинаковые напряжения V с задат- 25 чика 32 угла крена и скорректированные после схемы 31 сравнения. При этом пары катушек 47, 48 и 49, 50 , создают в центральной области рабочей части трубы вектрры напряженное- зо ти магнитного поля Н4Т(4д и , направленные по ося соответдтвую- щик пар. При этом H4vte -j и результирующий вектор напряженности магнитного пдля дополнительных кату- тек 1Т К41й4в +Н4,4 50 направлен вдоль оси Z,
При воздействии на модель аэродинамического врапающего момента и появления при ненулевого угла дф крена формируется напряжение и, (датчик 3 угла крена, усилитель 19, диф
ференциатор 25, сумматор 31)
Uy KtUy + К4ин,
где К 4 и К4 - коэффициенты передачи усилителя 19 и дифференциатора 25 j Vu - сигнал крена с выхода
датчика 3 крена. Если, например, у 7 О, то к паре катушек 47, 48 подводится напряжение с усилителя 40 мощности после вычи- тателя 33
уС и - V - (К, Uy+K2Uj) , ч
а к паре 49 50 подводится напряжени с усилителя 41 мощности после сумматора 34
,U + U - V + (К4 )
При этом и результирующий вектор напряженности магнитного поля катушек электромагнитов отклоняется на угол $ в сторону, противоположную появляющемуся углу крена. Взаимодействие момента постоянного магнита 53 модели с вектором напряженности вызывает вращающий момент
L(y,j) -ЗхЯ у,у..
Магнитное поле, создаваемое в центре рабочей части трубы катушками 47-50, равномерно вследствие предложенной схемы включения этих катуше поэтому это поле- создает лишь воздействующий на модель вращающий момент и не создает дополнительных сил.
Вращательное движение модели по углу крена описывается уравнением
IppllH) 8in((ff,p,
где I - момент инерции модели;
б - угол между направлением ректора Н и ,
Из уравнения следует, что модель возвращается в исходное угловое положение, причем за счет наличия .в привой части уравнения величины f (,Ј) обеспечивается демпфирование углового движения. Равновесие устанавливается- при
М
ВН
Для определения М $ц необходимо измерить токи пар электромагните 47, 48 и 49,. 50. Соответственно между токами и электромагнитным моментом устанавливается тарированием устг ройств.
Таким образом, предложенное устройство позволяет стабилизировать моГ дель по крену и измерять аэродинами ческий момент вращения модели по крену с высокой точностью.
Формула изобретения
Устройство управления положением модели в аэродинамической трубе,(содержащее датчик положения модели по осям электромагнитов, пять источников излучения, пять фотоприемников, пять усилителей фотоприемников, пять схем сравнения, пять задатчнков нулевого положения модели, пять усилителей, пять дифференциаторов, пять сумматоров, пять усилителей мощности, первый электромагнит стабилизации модели по оси X, второй и третий электромагниты стабилизации модели по оси Y и по углу относительно оси Z, четвертый и пятый электромагниты стабилизации модели по ос 7. и по углу относительно оси Y, соединенные соответственно с выходами первого, второго, третьего, четвертого и пятого усилителей мощности, входы которых соответственно соединены с выходами первого, второго, третьего, четвертого и пятого сумматоров, первые входы каждого сумматора соединены соответственно с выходами усилителей, вход каждого иэ которых соединен с выходом соответствующей схемы сравнения, вторые входы каждого из сумматоров соединены каждый с выходом своего дифференциатора, вход каждого дифференциатора соединен с выходом этой же схемы сравнения, один из входов каждой схемы сравнения связан с соответствующим одним из выходов датчика положения модели по осям электромагнитов, второй из входов каждой схемы сравнения связан с задатчиком положения модели по оси соответствующего электромагнита, при этом первый электромагнит стабилизации положения модели вдоль оси X расположен впереди рабочей части аэродинамической трубы в плоскости, параллельной плоскости YOZ, второй и третий электромагниты стабилизации положения модели вдоль оси Y и по углу вращения относительно оси 7. расположены сверху рабочей части трубы в плоскости, параллельной плоскости X07.t четвертый и пятый электромагниты стабилизации положения модели вдоль оси 7. и по углу вращения относительно оси Y расположены сбоку -рабочей части трубы в плоскости параллельной плоскости YOZ, каждый из пяти источников излучения оптически сопряжен со светим фотоприемником, соединенным с усилителем, выходы каждого из этих усилителей являются выходами датчика положения модели, первые входч первой, второй, третьей, четвертой и пятой схем сравнения соединены соответственно с первым, вторым, третьим, четвертым и пятым выходами датчика положения модели по осям электромагнитов.
5
0
5
0
5
0
5
0
5
каждый из задатчиков нулевого положения модели соединен с вторым входом соответствующей схемы сравнения, при этом модель снабжена сердечником ,из ферромагнитного материала, отличающееся тем, что с целью повышения точности за счет стабилизации модели по крену и измерения аэродинамического момента вращения модели по углу крена, оно снабжено датчиком угла крена с источником излучения, преобразователег 5 код - аналог и п фотоприемниками, шестым усилителем, шестым дифференциатором, шестым сумматором, задатчиком угла крена, вычитателем, седьмым сумматором, шестым и седьмым усилителями мощности, шестым, седьмым, восьмым и девятым дополнительными электромагнитами, источником постоянного напряжения, постоянным магнитом, выход датчика угла крена соединен с входом шестого усилителя и шестого дифференциатора, выход которого соединен с вторым входом шестого сумматора, первый1 вход которого соединен с выходом шестого усилителя, а выход - с первым входом вычитателя и первым входом седьмого сумматора, второй вход вычитателя и второй вход седьмого сумматора соединены с выходом источника постоянного напряжения, выход задатчика угла крена соединен с третьим входом вычитателя, вы- 4 ход вычитателя соединен с вхсДом того усилителя мощности, выход седьмого сумматора соединен с входом седьмого усилителя мощности, выход шесто -ч го усилителя мощности соединен последовательно соединенными обмотками первой пары дополнительных электромагнитов, выход седьмого усилителя мощности соединен с последовательно соединенными обмотками второй пары дополнительных электромагнитов, тес- той, седьмой, восьмой и девятый до- полнительные электромагниты располо- жены вне рабочей части аэродинами- I ческой трубы таким образом, что силы их взаимодействия с моделью направлены в плоскости YOZ и направления их составляют с направлениями осей Y и 7. углы и 45°, парные электромагниты, имеющие последовательно соединенные обмотки, расположены вне рабочей части аэродинамической трубы напротив друг друга, а постоянный магнит расположен внутри модели
таким образом, что линия, соединяющая северный и южный полюсы, перпендикулярна оси X, источник излуче- ,ния установлен на модели, п фотоприемников распряржены внизу рабочей
части аэродинамической трубы по линии, параллельной оси Z, и выходами соединены с входами преобразователя код-аналог, выход которого является выходом датчика угла крена.


Изобретение относится к авиационной промышленности, а именно к аэродинамическим трубам с магнитным подвесом модели летательного аппарата. Цель изобретения - повышение точности управления положением модели в аэродинамической трубе. Устрой - ство содержит электромагниты стабилизации положения модели 1 по осям X, Y, И и по углам вращения относительно осей Y, 7,, датчик 2 положения модели, задатчнки 4-8 нулевого положения модели, схемы сравнения , усилители 14-18, дифференциаторы 20-24, сумматоры 26-30, усилители 35-39 мощности, В устройство введены датчик 3 угла крена, усилитель 19, дифференциатор 25, сумма- торы 31 и 34, вычитатели 33, задат- чик 3 угла крена, усилители 40, 41 мощности и четыре электромагнита 47- ( 50, установленных под углом 45° к .осям У и 7. координат в модель I летательного аппарата, Катутики электрог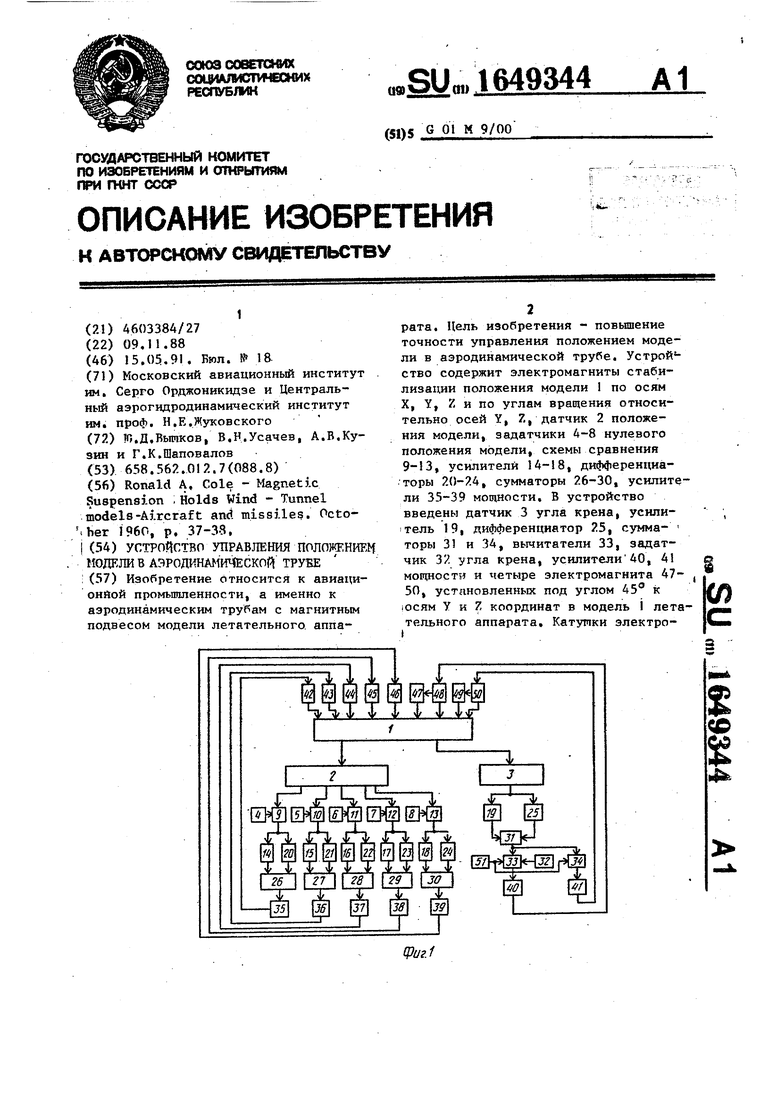
i
/
W
1 s
ж
.
тУW
/
4J
Ј
Т
te.J
т т
Ф&7
| Ronald A, Cole - Magnetic Suspension | |||
| Holds Wind - Tunnel models-Aircraft and missiles | |||
| Пробочный кран | 1925 |
|
SU1960A1 |
| Пишущая машина | 1922 |
|
SU37A1 |
