fe
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой пропорционально-интегрально-дифференциальный регулятор | 1979 |
|
SU883864A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1992 |
|
RU2072548C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Установка для присоединения проволочных выводов | 1988 |
|
SU1549698A1 |
| Устройство для регулирования давления | 1988 |
|
SU1674075A1 |
| Стабилизированный электропривод постоянного тока | 1986 |
|
SU1359879A1 |
| ДЕМОДУЛЯТОР ДВУХПОЗИЦИОННЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2018 |
|
RU2699066C1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Цифровой пропорционально-интегрально-дифференциальный регулятор | 1979 |
|
SU860005A1 |
Изобретение относится к автоматизированным системам регулирования с цифровым управлением и может найти применение в системах регулирования частоты вращения и положения различных механизмов Цель изобретения - повышение точности регулирования. Цифровой пропорционально-интегрально-дифференциальный регулятор содержит тактовый генератор 1, блок 2 управления, первый сумматор 3, первый регистр 4, второй сумматор 5, второй регистр 6, третий сумматор 7, третий регистр 8, четвертый регистр 9. Цель изобретения достигается за счет связи выхода тактового генератора со входом блока управления и связи информационного входа и инверсного выхода четвертого регистра соответственно с выходом первого регистра и с третьим входом третьего сумматора. 1 ил.
Изобретение относится к автоматизированным системам регулирования с цифровым управлением и может найти применение в системах регулирования частоты вращения и положения различных механизмов.
Цель изобретения - повышение точности регулирования
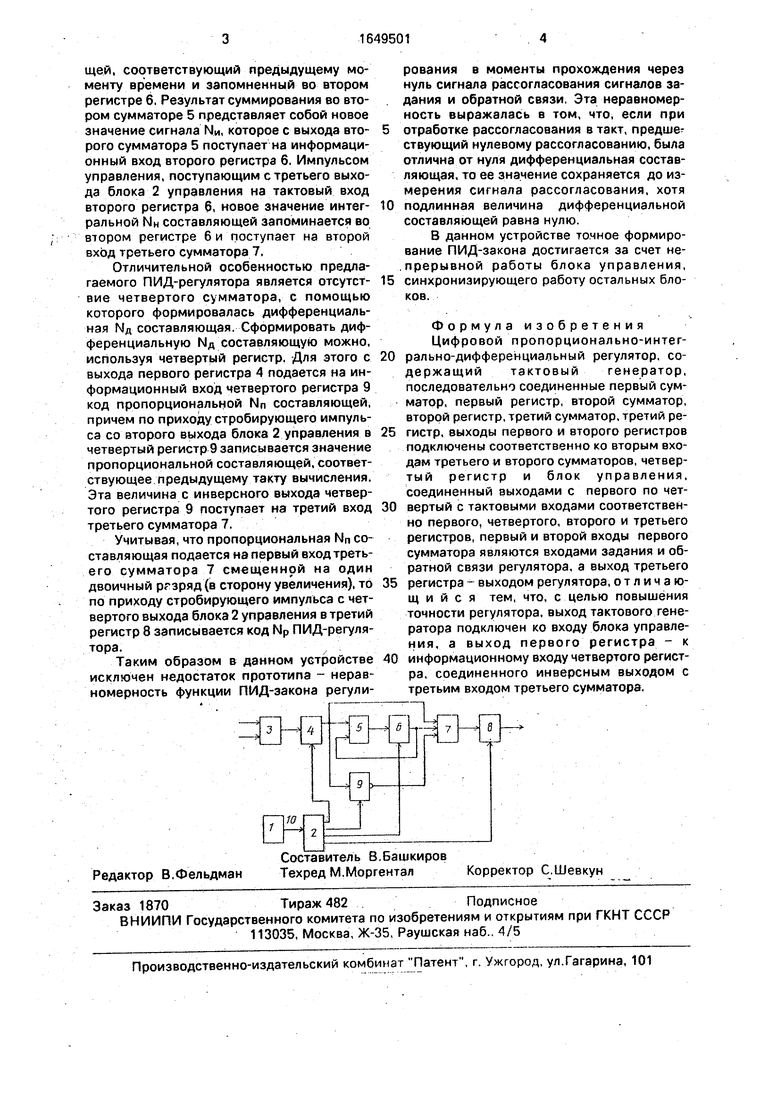
На чертеже представлена функциональная схема цифрового пропорционально-ин- тегрально-дифференциального (ПИД) регулятора, Цифровой ПИД-регулятор содержит тактовый генератор 1, блок 2 управления, первый сумматор 3, первый регистр 4, второй сумматор 5,второй регистр 6, третий сумматор 7, третий регистр 8, четвертый регистр 9, выход 10 тактового генератора 1, выход 11 сумматора 3,
Цифровой ПИД-регулятор работает следующим образом В исходный момент времени регистры 4, 6, 8 и 9 установлены р
нулевое состояние сигналом Установка О. На первый вход первого сумматора 3 поступает код задания N3, а на второй его вход - код отрицательной обратной связи N0c с выхода 11 первого 3 сумматора,результат, являющийся пропорциональной Nn составляющей регулятора, поступает на вход первого регистра 4. Одновременно на вход блока 2 управления с выхода 10 тактового генератора 1 с частотой ъ поступают тактовые импульсы.
По переднему фронту этих импульсов на первом выходе блока 2 управления формируется импульс управления и. поступая на тактовый вход первого регистра 4, записывает код пропорциональной Мп составляющей на первый вход второго сумматора 5, на первый вход третьего сумматора 7 и на информационный вход четвертого регистра 9. На второй вход второго сумматора 5 поступает сигнал интегральной Ми составляюOs
о ел о
щей, соответствующий предыдущему моменту времени и запомненный во втором регистре 6. Результат суммирования во втором сумматоре 5 представляет собой новое значение сигнала Ми, которое с выхода вто- рого сумматора 5 поступает на информационный вход второго регистра 6. Импульсом управления, поступающим с третьего выхода блока 2 управления на тактовый вход второго регистра 6, новое значение интег- ральной NH составляющей запоминается во втором регистре 6 и поступает на второй вход третьего сумматора 7,
Отличительной особенностью предлагаемого ПИД-регулятора является отсутст- вие четвертого сумматора, с помощью которого формировалась дифференциальная Ыд составляющая. Сформировать дифференциальную Мд составляющую можно, используя четвертый регистр. Для этого с выхода первого регистра 4 подается на информационный вход четвертого регистра 9 код пропорциональной Мп составляющей, причем по приходу стробирующего импульса со второго выхода блока 2 управления в четвертый регистр 9 записывается значение пропорциональной составляющей, соответствующее предыдущему такту вычисления. Эта величина с инверсного выхода четвертого регистра 9 поступает на третий вход третьего сумматора 7.
Учитывая, что пропорциональная Мп составляющая подается на первый вход третьего сумматора 7 смещенной на один двоичный ргзряд (в сторону увеличения), то по приходу стробирующего импульса с четвертого выхода блока 2 управления в третий регистр 8 записывается код Мр ПИД-регулятора.
Таким образом в данном устройстве исключен недостаток прототипа - неравномерность функции ПЙД-закона регулирования в моменты прохождения через нуль сигнала рассогласования сигналов задания и обратной связи, Эта неравномерность выражалась в том, что, если при отработке рассогласования в такт, предшествующий нулевому рассогласованию, была отлична от нуля дифференциальная составляющая, то ее значение сохраняется до измерения сигнала рассогласования, хотя подлинная величина дифференциальной составляющей равна нулю.
В данном устройстве точное формирование ПИД-закона достигается за счет непрерывной работы блока управления, синхронизирующего работу остальных блоков.
Формула изобретения Цифровой пропорционально-интегрально-дифференциальный регулятор, содержащий тактовый генератор, последовательно соединенные первый сумматор, первый регистр, второй сумматор, второй регистр, третий сумматор, третий регистр, выходы первого и второго регистров подключены соответственно ко вторым входам третьего и второго сумматоров, четвер- тый регистр и блок управления, соединенный выходами с первого по четвертый с тактовыми входами соответственно первого, четвертого, второго и третьего регистров, первый и второй входы первого сумматора являются входами задания и обратной связи регулятора, а выход третьего регистра - выходом регулятора, отличающийся тем, что, с целью повышения точности регулятора, выход тактового генератора подключен ко входу блока управления, а выход первого регистра - к информационному входу четвертого регистра, соединенного инверсным выходом с третьим входом третьего сумматора.
| Цифровой пропорционально-интегрально-дифференциальный регулятор | 1979 |
|
SU883864A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
