(54) СИСТЕМА АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНЫХ АГРЕГАТОВ
1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам автоматического направления движения самоходных агрегатов.
Известна система автоматического направления движения самоходных агрегатов, содержащая неподвижные полевые радиостанции, установленные на самоходных агрегатах блоки управления и сервоприводы управляющих механизмов. Эта система позволяет вести самоходный агрегат с высокой точностью 1.
Недостатками данной системы является ее сложность, обусловленная использованием фазового разностно-гиперболического координатомерного метода, а также невозможность автоматического перехода с одного участка обработки на другой.
Целью изобретения является обеспечение автоматического разворота и перехода самоходных агрегатов на очередной участок обработки.
Цель достигается тем, что блок управления включает блок приема сигналов полевых радиостанций, блоки управления движением по базовой и условной линиям, блок
управления рабочими органами, программные блоки въезда и выезда,триггер выключения блока управления движением по базовой линии и блока управления рабочими органами и триггер выключения блока управления движением по условной линии, причем блоки управления движением по базовой и условной линиям, а также программные блоки въезда и выезда соединены с сервоприводами управляющих механизмов, при этом блок приема сигналов полевых радиостанций имеет двухканальную антенную систему, устройство управления сканированием диаграммы направленности, приемники с формирователями импульсов и соединенную с ними схему совпадения, причем последняя подключена к программному блоку выезда и к триггеру выключения блока управления движением по базовой линии и блока управления рабочими органами.
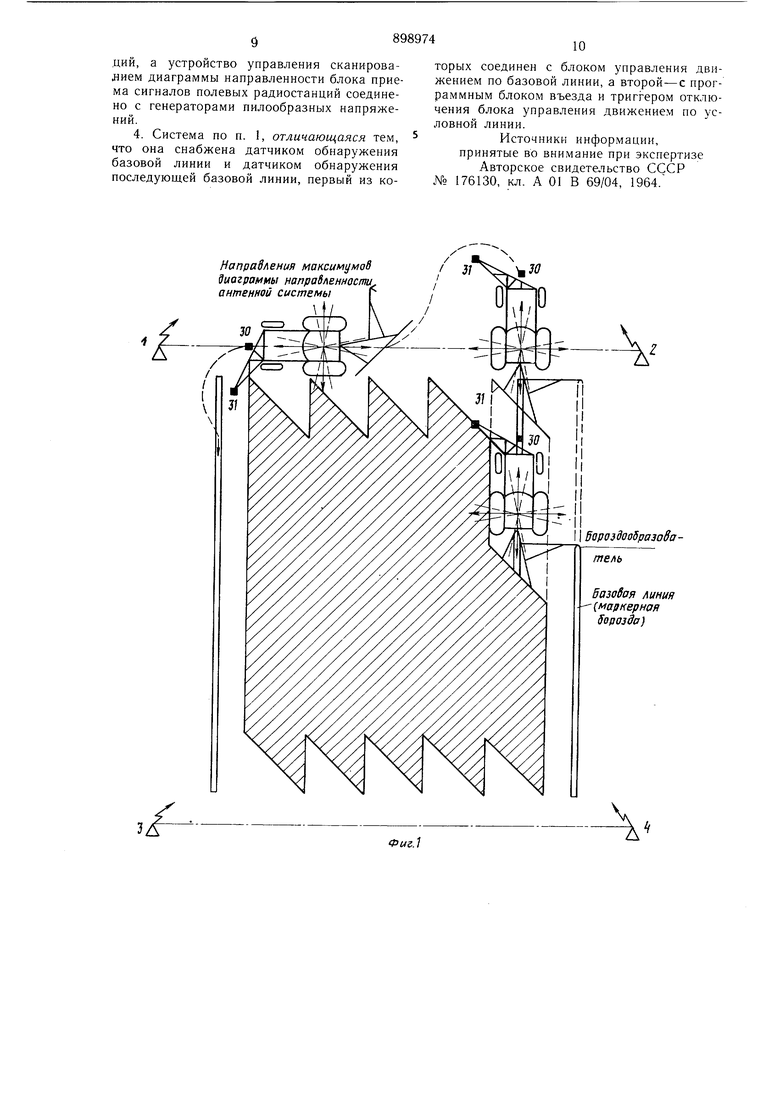
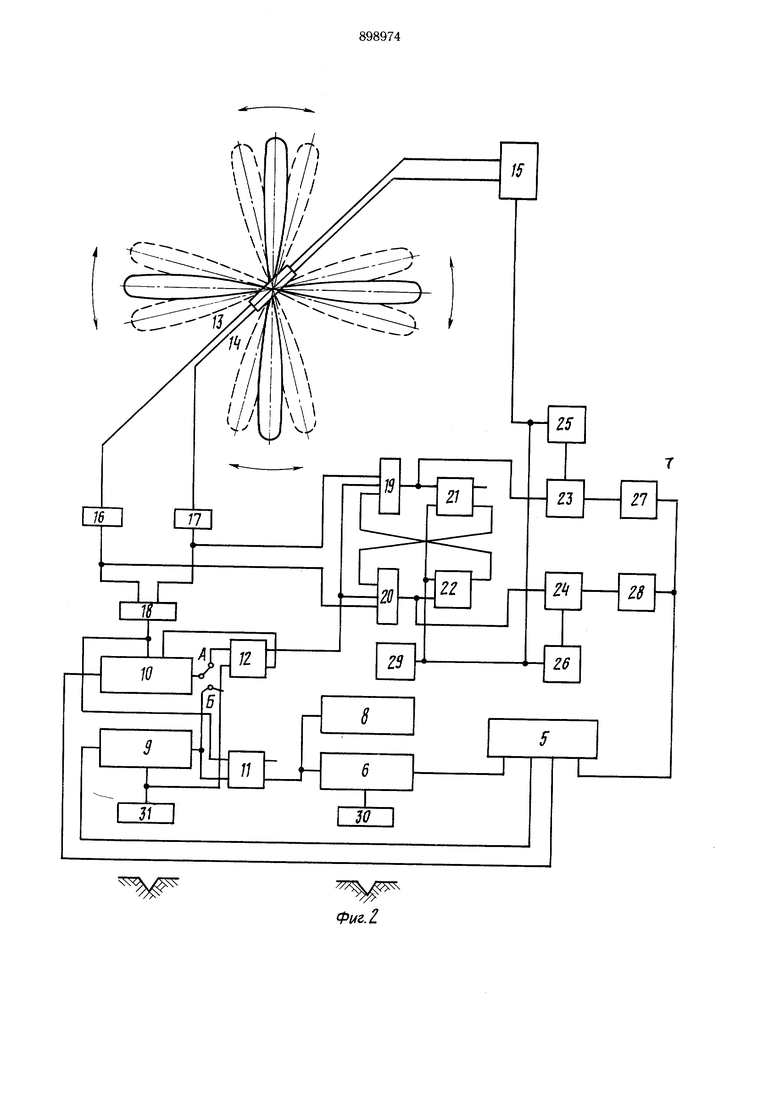
Кроме того, программный блок въезда соединен с блоком управления движением по условной линии через триггер выключения последнего, при этом блок управления движением по условной линии выполнен в виде двух каналов, каждый из которых имеет схему совпадения, триггер отключения канала, электронный ключ, соединенный с ним генератор пилообразных напряжений и интегрирующее устройство, вход которого соединен с электронным ключом, а выход - с выходом интегрирующего устройства другого канала и с сервоприводами управляющих механизмов, причем оба канала имеют генератор синхроимпульсов, который соединен с генераторами пилообразных напряжений и триггерами отключения каналов, выход каждого из которых соединен со входом схемы совпадения другого канала, при этом схемы совпадения каналов соединены с выходами приемников с формирователями импульсов блока приема сигналов полевых радиостанций, а устройство управления сканированием диаграммы направленности блока приема сигналов полевых радиостанций соединено с генераторами пилообразных напряжений и, помимо этогОу система снабжена датчиком обнаружения базовой линии и датчиком обнаружения последующей базовой линии, первый из которых соединен с блоком управления движения по базовой линии, а второй - с программным блоком въезда и триггером отключения блока управления движением по условной линии. На фиг. 1 показана система автоматического направления движения самоходных агрегатов в работе; на фиг. 2 - блок-схема предлагаемой системы автоматического направления движения самоходных агрегатов; на фиг. 3 - закон сканирования диаграммы направленности антенной системы. Система содержит неподвижные полевые радиостанции 1-4, расположенные на углах обрабатываемого поля. Эти радиостанции представляют собой малогабаритные радиопередатчики, работающие в режиме непрерывного излучения на частотах, разнесенных одна относительно другой на некоторую величину. На самоходном агрегате установлен блок управления и сервоприводы управляющих механизмов 5. Блок управления включает блок приема сигналов радиостанций (на чертеже не обозначен), блоки управления движением по базовой и условной линиям 6 и 7, блок управления рабочими органами 8, программные блоки въезда и выезда 9 и 10, триггер 11 выключения блоков 6 и 8 и триггер 12 выключения блока 7, причем блоки управления движением по базовой и условной линиям 6 и 7, а также программные блоки въезда и выезда 9 и 10 соединены с сервоприводами управляющих механизмов 5. Базовая линия - это линия вдоль участка обработки, например длина гона, а условная линия - это линия, соединяющая две полевые радиостанции, расположенные на краю поля на участке разворота, но не являющаяся базовой. Блок приема сигналов полевых радиостанций имеет двухканальную антенную систему с каналами 13 и 14, устройство 15 управлёния сканкрованием диаграммы направленности, приемники 16 и 17 с формирователями импульсов, и соединенную с ними схему совпадения 18, причем последняя подключена к программному блоку выезда 10 и к триггеру 11 выключения блоков 6 и 8. Программный блок въезда 9 соединен через триггер 12 с блоком 7, выполненным в виде двух каналов, каждый из которых имеет схему совпадения 19 и 20, триггер 21 и 22 отключения канала, электронный ключ 23 и 24, соединенный с ним генератор 25 и 26 пилообразных напряжений и интегрирующее устройство 27 и 28, вход которого соединен с электронным ключом 23 и 24, а выход - с выходом интегрирующего устройства 28 и 27 другого канала и с сервоприводами управляющих механизмов 5, причем оба канала имеют генератор синхроимпульсов 29, который соединен с генераторами 25 и 26 и с триггерами 21 и 22 отключения каналов, вы)Д каждого из которых соединен со входом схемы совпадения 20 и 21 другого канала, при этом входы схем совпадения 20 и 21 соединены с выходами приемников 16 и 17с формирователями импульсов блока приема сигналов полевых радиостанций 1-4. Устройство управления сканированием диаграммы направленности 15 соединено с генераторами пилообразных напряжений 25 и 26. Система содержит также датчик 30 обнаружения базовой линии и датчик 31 обнаружения последующей базовой линии. Датчик 30 соединен с блоком 6 управления движением по базовой линии, а датчик 31 - с программным блоком 9 въезда и триггером 12 отключения блока 7 управления движением по условной линии. Траекторию движения агрегата при обработке поля составляют в общем случае следующие участки: движение на гоне (по базовой линии), разворот в конце гона (выезд), переход к очередному гону (движение по условной линии), разворот и вход на очередной гон (въезд). Этим участкам соответствует структура блока управления: блоки 6, 10, 7 и 9. Система автоматического направления движением самоходных агрегатов работает следующим образом. На гоне управление движением самоходного агрегата производится с помощью блока управления движением по базовой линии 6, сигнал отклонения на входе которого формируется датчиком 30 обнаружения базовой линии. В момент выезда агрегата на условную линию (выезда за предел поля) на обоих входах схемы совпадения 18 одновременно появляются сигналы, что вызывает появление импульса на ее выходе. Этот импульс опрокидывает триггер 11, в результате чего на его выходе, соединенном со входом включения блока управления движением
по базовой линии 6, устанавливается уровень нуля, что вызывает выключение этого блока.
Одновременно происходит запуск программного блока выезда 10, который по управляющему своему выходу, соединенному с сервоприводами управляющих механизмов 5, осуществляет управление движением агрегата на участке разворота в конце гона. По окончании программы разворота на выходе программного блока выезда 10 появляется импульс, который опрокидывает триггер 12 в состояние включения по его выходу, соединенному со входами схем совпадения 19 и 20.
Таким образом, производится включение блока управления движения по условной линии 7 на участке перехода к очередному гону.
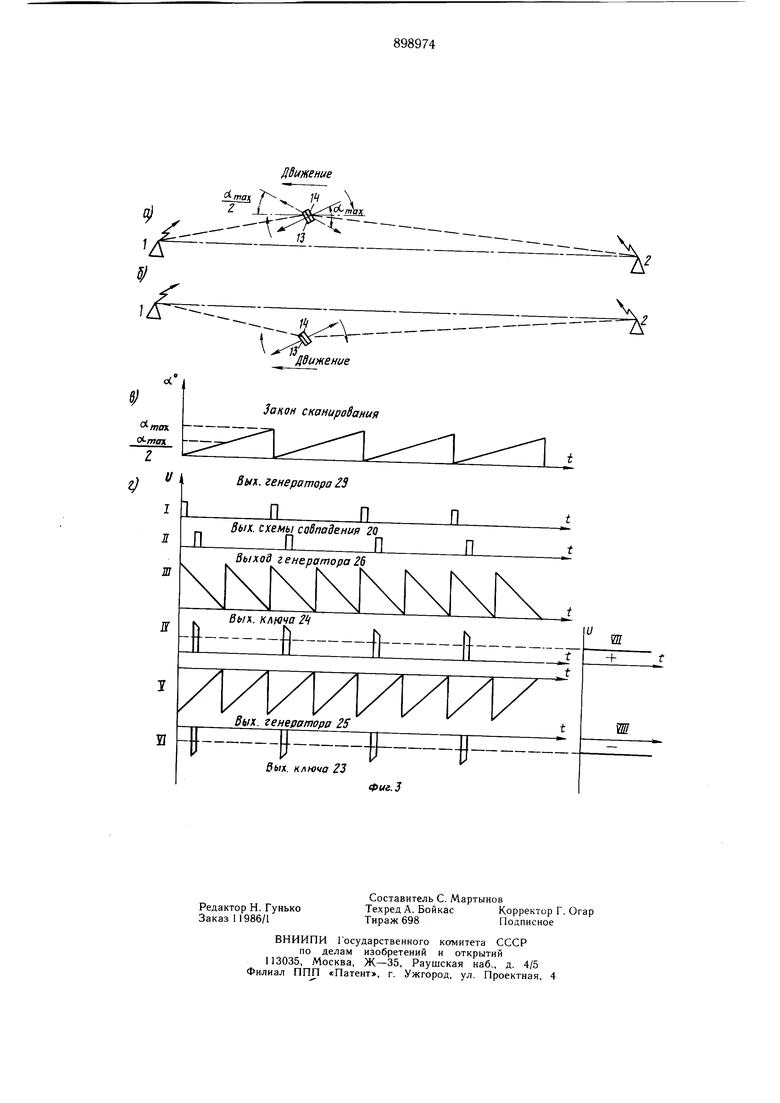
Появление сигналов на выходе схемы совпадения 18 в момент выезда агрегата на условную линию обусловлено тем,, что двухканальная антенная система сконструирована таким образом, что диаграмма направленности ее имеет, например, четыре лепестка, выходящие из общего центра во взаимно-перпендикулярных направлениях, сканирующие в пределах определенного угла, при сохранении взаимной перпендикулярности. Соединенные пары лепестков объединены и образуют два независимых канала 13 и 14. Выходы этих каналов подключены к приемникам 16 и 17 с формирователями-импульсов, которые соединены с двумя входами схемы совпадения 18. При сканировании (с помощью устройства 15 управления сканированием диаграммы направленности) на выходе каждого канала антенной системы появляется импульс в момент прохождения максимума соответствующего лепестка направления на полевую радиостанцию. Поскольку при сканировании лепестков сохраняется их взаимная перпендикулярность, то противоположные лепестки, принадлежащие разным каналам 13 и 14, в любой момент времени находятся на одной линии. Поэтому направления максимумов лепестков обоих каналов 13 и 14 одновременно по обе радиостанции 1 и 2, расположенные на одном краю поля, в конце гона происходит лищь в момент выезда агрегата на условную линию.
Сканирование диаграммы направленноетн антенной системы происходит, например, по часовой стрелке.
С помощью генератора 29 синхроимпульсов осуществляется синхронность сканирования с работой генераторов 25 и 26 пилообразных напряжений и триггеров 21 и 22 отключения каналов 13 и 14. В начальный момент сканирования (оС 0) триггеры 21 и 22 отключения каналов импульсом с генератора 29 синхроимпульсов переводятся во включенное состояние, обеспечивая уровни единиц на соответствующих входах схем совпадения 19 и 20. Таким образом, в начальный момент сканирования схемы совпадения 19 и 20 обоих каналов находятся.в состоянии разрещения прохождения сигналов по третьим их входам, соединенным с выходами приемников 16 и 17с формирователями импульсов.
В случае, когда агрегат отклонился вправо от условной линии, сигнал в канал 13 от радиостанции 1 поступает раньще, чем в канал 14 от радиостанции 2, поскольку направление луча диаграммы направленности канала 13 раньще совпадает с направлением на радиостанцию 1, чем соответствующий луч канала 14 на радиостанцию 2.
Приемник 16 с формирователем импульсов усиливает этот сигнал и формирует на
5 своем выходе короткий импульс. Поступая на третий вход схемы совпадения 20, этот импульс проходит на ее выход и, воздействуя на вход триггера 22 отключения канала, переводит его в состояние выключения
(j по выходу, подключенному к одному из входов схемы совпадения 19 другого канала, что накладывает запрет на прохождение сигналов через эту схему.
За каждый период сканирования на выходе схемы совпадения 20 появляется один
5 импульс в момент прохождения лучом диаграммы направленности канала 13 антенной системы направления на радиостанцию 1. Эти импульсы управляют электронным ключом 24 так, что на его выход в моменты воздействия каждого импульса проходит напряжение с генератора 26 пилообразного напряжения. Таким образом, на выходе ключа 24 образуются импульсы напряжения, амплитуда которых равна величине напряжения генератора 26 пилообразного напряжения в момент воздействия управляющих импульсов на ключ 24. Форма пилообразного напряжения подобрана таким образом, что в начальный момент сканирования оно имеет максимальное значение, а к середине периода спадает до нуля. Чем раньше (в пределах половины периода сканирования ) на вход ключа 24 поступает импульс, тем большей амплитуды импульс на его выходе. При этом время поступления управляющего импульса зависит от величины отклонения агрегата от условной линии. Импульсы на выходе ключа 24 интегрируются интегрирующим устройством 28 и на его выходе образуется постоянное напряжение, пропорциональное величине отклонения от условной линии. Эпюры I, II, III, IV отражают напряжение на элементах блока 7 при отклонении агрегата вправо от условной линии.
Другой канал блока управления движением по условной линии работает аналогично первому, но только при отклонении
J влево от условной линии. Эпюры V, VI, VII. VIII отражают напряжение на эле.мента.ч блока 7 при отклонении агрегата влево от условной линии.
Отличие каналов составляют генераторы 25 и 26 пилообразных напряжений. Они отличаются полярностью генерируемых напряжений.
При нахождении агрегата точно на условной линии, сигналы от обеих радиостанций I и 2 поступают в каналы одновременно, аба канала блокируются по входам схем совпадения 19 и 20, на выходе блока управления движением по условной линии 7 напряжение равно нулю.
На определенном расстоянии от очередного гона, при движении агрегата по условной линии на участке перехода, в зону датчика 31 обнаружения последующей базовой линии попадает базовая линия этого гона. На выходе датчика 31 вырабатывается сигнал, который переключает триггер 12, отключая тем самым блок управления движением по условной линии 7, одновременно сигнал с этого датчика включает программный блок въезда 9. Агрегат совершает разворот и въезд на очередной гон. По окончании программы, на выходе программного блока въезда 9, соединенном со входо.м триггера 11, вырабатывается импульс и триггер И осуществляет включение блока управления движением по базовой линии 6 и блока управления рабочими органами 8.
Нуль на выходе триггера 11, соединенном с программным блоком въезда 9, запрещает включение этого блока во вре.мя движения по условной линии на участке перехода с гона на гон.
На другом конце поля описанный выше цикл работы повторяется с полевы.ми радиостанциями 3 и 4.
Предлагаемая система автоматического направления движения самоходных агрегатов универсальна по способам движения на поле. Для этого предусмотрена возможность реализации другой траектории движения (более простой), характерной, например, для междурядной обработки пропашных культур или уборки поля. Эта траектория состоит из следующих участков: движение на гоне, полный разворот в конце гона с вхождением на очередной гон (последующий) .
Такая траектория реализуется при нахождении переключателя блока управления 10 из положения А в положение Б. При этом блок управления .-движением по условной линии 7 отключен, а отключение перед разворотом по сигналу CQ схемы совпадения 18 блоки управления движением по базовой линии 6 и управления рабочими органами 8 включаются сразу же после окончания программы разворота по сигналу с программного блока выезда 10. Предварительно программный блок выезда 10 переключается на режим полного разворота.
Применение предлагаемой системы позволит значительно повысить производительность труда при обработке поля за счет повыщения скорости движения агрегатов на гоне, высвобождения высококвалифицированных работников, улучщит условия труда.
Формула изобретения
1.Система автоматического-направления движения са.моходных агрегатов, содержащая неподвижные полевые радиостанции, установленные на самоходных агрегатах блоки управления и сервоприводы управляющих механиз.мов, отличающаяся тем, что, с целью рбеспечения атоматического разворота и перехода самоходных агрегатов на очередной участок обработки, блок управления включает блок приема сигналов полевых радиостанций, блоки управления движением по базовой и условной линиям, блок управления рабочими органами, программные блоки въезда и выезда, триггер выключения блока управления движением по базовой линии и блока управления рабочими органа.ми и триггер выключения блока управления движением по условной линии, причем блоки управления движением по базовой и условной линиям и программные блоки въезда и выезда соединены с сервоприводами управляющих механизмов.
2.Система по п. 1, отличающаяся те.м, что блок приема сигналов- полевых радиостанций имеет двухканальную антенную систему, устройство управления сканирование.м диаграм.мы направленности, приемники с формирователями импульсов и соединенную с ними схему совпадения, причем последняя подключена к програм.мному блоку выезда и к триггеру выключения блока управления движением по базовой линии и блока управления рабочими органа.ми.
3.Систе.ма по пп. 1 и 2, отличающаяся тем, что програм.мный блок въезда соединен с блоком управления движением по условной линии через триггер выключения последнего, при этом блок управления движением по условной линии выполнен в виде двух каналов, каждый из которых имеет схему совпадения, триггер отключения канала,
5 электронный ключ, соединенный с ним генератор пилообразных напряжений и интегрирующее устройство, вход которого соединен с электронным ключом, а выход - с выходом интегрирующего устройства другого канала и с сервоприводами управляющих механизмов, причем оба канала имеют генератор синхроимпульсов, который соединен с генераторами пилообразных напряжений и с триггерами отключения каналов, выход каждого из которых соединен со входом схемы совпадения другого канала, при этом схемы совпадения каналов соединены с выходами приемников с формирователями импульсов блока приема сигналов полевых радиостандни, а устройство управления сканировалием диаграммы направленности блока приема сигналов полевых радиостанций соединено с генераторами пилообразных напряжений. 4. Система по п. 1, отличающаяся тем, что она снабжена датчиком обнаружения базовой линии и датчиком обнаружения последующей базовой линии, первый из которых соединен с блоком управления движением по базовой линии, а второй с программным блоком въезда и триггером отключения блока управления движением по условной линии. Источники информации, принятые во внимание при экспертизе Авторское свидетельство СССР № 176130, кл. А 01 В 69/04, 1964.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического направления движения самоходных агрегатов | 1978 |
|
SU731915A1 |
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU615880A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА | 1996 |
|
RU2111898C1 |
| Устройство для автоматического управления движением самоходного агрегата | 1979 |
|
SU767710A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
Направления максимумов диаграммы иапрабленности антенной системы - I Вароздоо5разо8абазовая линия (маркерная Sopoida
Фиг.1
w
Фиг.2.
Лта
14
:
Цвижение Закон сканироёания
-
V ,
Вых. генератора 29
I I
пп
8ыи. схемы совпадения 20
Ппп
п
в(г/к. клц1ча Я
S
ялтЬ 1т :г
т
-f
ж
