Изобретение относится к лабораторной технике и может найти применение в биологии, медицине, биохимии и других областях при разделении веществ и в центробежных полях.
Цель изобретения - повышение срока службы центрифуги путем снижения динамических нагрузок.
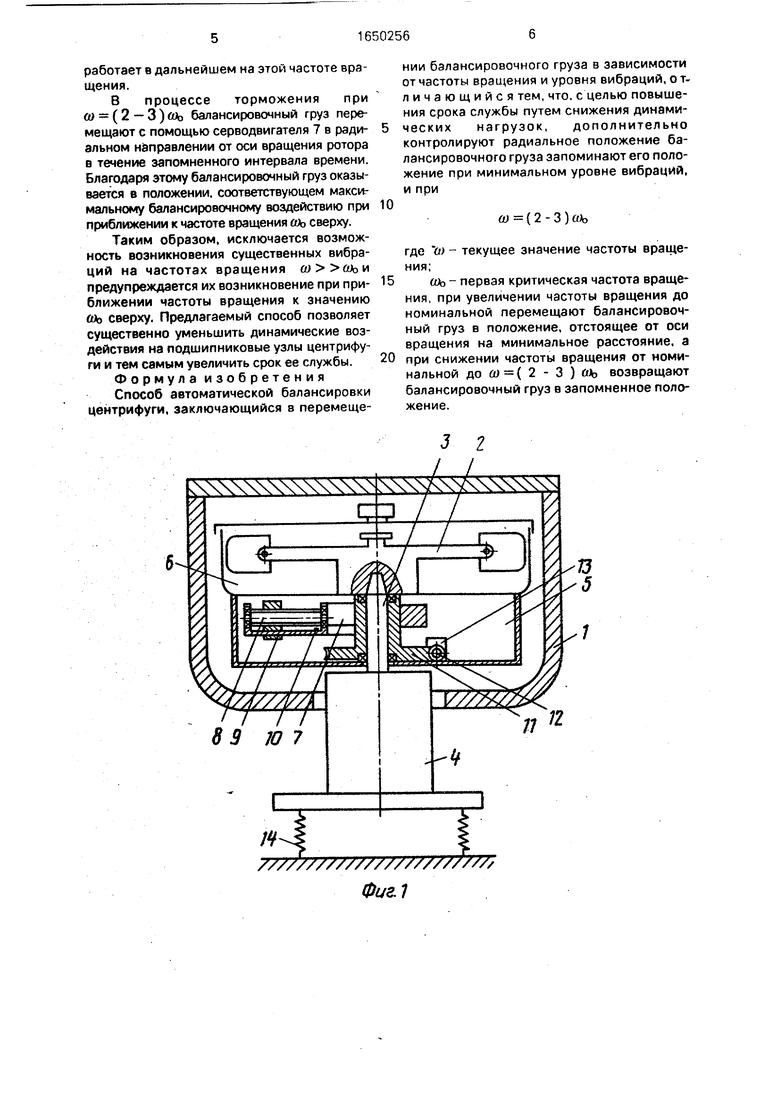
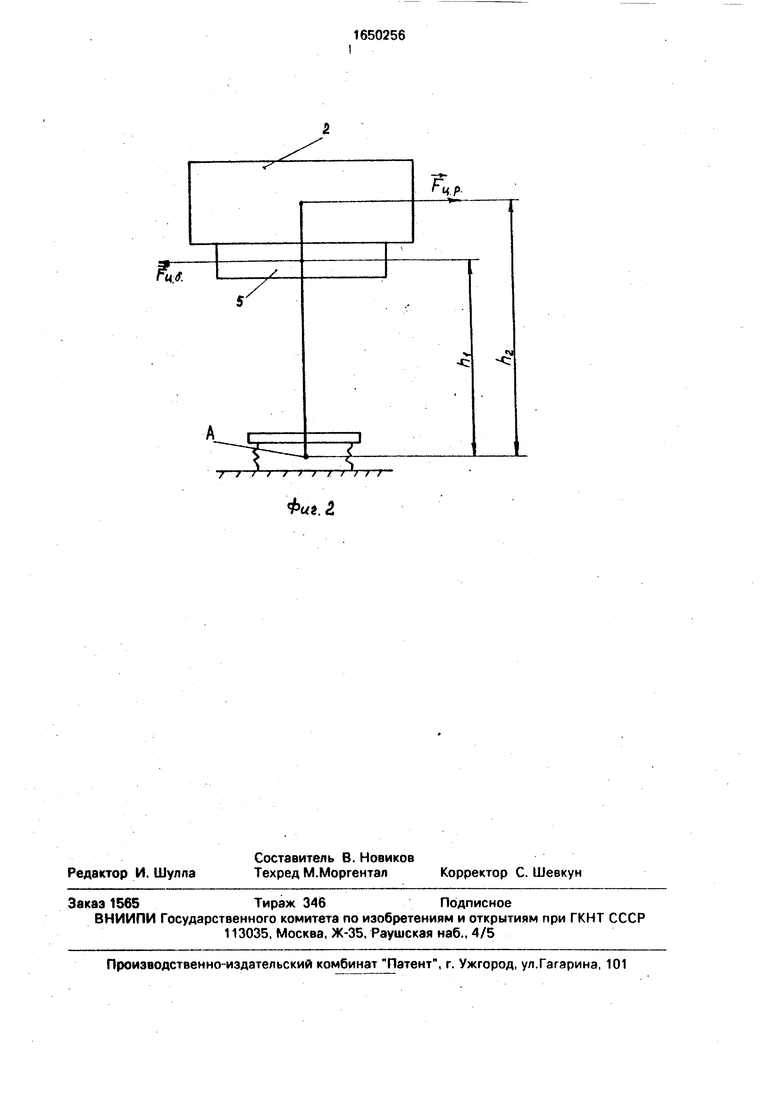
На фиг.1 изображена схематически центрифуга для осуществления предлагаемого способа; на фиг.2 - кинематическая схема центрифуги.
В камере 1 центрифуги (фиг.1) расположен ротор 2, закрепленный на валу 3 приводного двигателя 4. Исполнительный механизм 5 устройства автоматической балансировки, закрепленного под обтекателем 6, состоит из серводвигателя 7, который
связан с ходовым винтом 8, обеспечивающим радиальное перемещение балансировочного груза 9. Ограничитель 10 лимитирует перемещение груза 9 в направлении вала 3. Серводвигатель 7 закреплен на втулке 11, нижний торец которой имеет зубчатую периферию и находится в зацеплении с червяком 12. Последний закреплен на валу серводвигателя 13, который обеспечивает угловое перемещение груза 9. Приводной двигатель 4 установлен на упругих элементах 14.
На фиг.2 А - центр качания системы приводной двигатель - вал-ротор; hi - расстояние от плоскости расположения центра масс балансировочного груза до центра качания; ha - расстояние от плоскости оаспоо. ел о го ел о
ложения центра масс ротора до центра качания.
Сущность предлагаемого способа состоит в следующем.
В конструкциях лабораторных центрифуг принята вертикальная кинематическая схема расположения системы двигатель - вал-ротор, причем ротор 2 является сменным элементом конструкции и устанавливается на вал 3 сверху (фиг.1). Единственным местом для установки исполнительного механизма 5 устройства автоматической балансировки является свободное пространство между нижней частью ротора 2 и дном камеры 1 центрифуги (фиг.1). При этом плоскости, в которых расположены центры масс ротора и балансировочного груза, расположены на разной высоте (фиг.2).
На частоте вращения центрифуги, меньшей первой критической, осуществляется автоматическая балансировка, сущность которой состоит в том, что балансировочный груз путем углового и радиального перемещений занимает такое положение, при ко- Toppj выполняется условие
Kj.p. + Fii.e-O,(1)
где Kip A mi of п - вектор центробежной силы, созданной неуравновешенной массой ротора;
Ami - величина неуравновешенной массы ротора;
о)- текущая частота вращения;
FT - радиус-вектор центра масс неуравновешенной массы ротора;
Рц.б. т2 аг га- вектор центробежной силы, созданной балансировочным грузом;
т2 - масса балансировочного груза;
г - радиус-вектор центра масс балансировочного груза.
Однако моменты, созданные силами Рц.р и Рц.б, относительно центра качения А (фиг,2) не равны между собой из-за неравенства hi и ha. Поэтому со стороны вращающегося ротора 2 к валу 3 приложен момент, обращающийся вокруг оси вращения. Его величина определяется из выражения
Ami ri(h2 -hi ).(2)
При малых значениях «о, соответствующих частотам вращения, меньшим первой критической оъ. величина Mh мала и вибрации, создаваемые этим моментом, малы.
Виду квадратической зависимости Mh от ш его значение возрастает с увеличением ш и вызывает существенные вибрации при значениях ofpoh. А при о) оь наступает самоцентрирование ротора и необходимость выполнения условия (1) практически отпадает.
Поэтому, если при частотах вращения а) оьбалансировочный груз вернуть в положение минимального балансировочного воздействия, то момент Mh станет фактически равным нулю из-за того, что силы Рц.р. и Рц.б уменьшаются практически до нуля, так как п и гг становятся равными нулю: п вследствие эффекта самоцентрирования, Г2 - в результате возврата балансировочного груза в положение минимального балансировочного воздействия.
Для того, чтобы в процессе торможения
при приближении о) к Здэ сверху обеспечить сбалансированное состояние ротора, необходимо вернуть балансировочный груз в положение, соответствующее максимальной уравновешенности.
С этой целью необходимо запомнить положение балансировочного груза, соответствующее наилучшей уравновешенности. Запоминание положения может быть реализовано различными устройствами,
например, путем запоминания сделанных при уравновешивании чисел оборотов серводвигателей или путем запоминания интервала времени, потребовавшегося на перемещение балансировочного груза из
положения максимальной уравновешенности в положение минимального балансировочного воздействия.
Центрифуга работает следующим образом.
Пусть ротор 2 неуравновешен и начат его разгон до заданной частоты вращения. При достижении ротором 2 в процессе разгона частоты со Мо по сигналу датчика вибраций (не показан) начинает работать
один из серводвигателей 7 и 13 либо оба серводвигателя, перемещая балансировочный груз 9 до тех пор, пока не будет достигнут заданный минимальные; уровень вибраций, при котором допускается дальнейший разгон ротора центрифуги.
При дальнейшем разгоне центрифуги, например при w ( 2 - 3 ) иьбалансировочный груз перемещают с помощью серводвигателя 7 в радиальном направлении к центру вращения ротора центрифуги до ограничителя 10, установленного в непосредственной близости от оси вращения ротора. Это положение соответствует минимальному балансировочному воздействию. Интервал времени, за который балансировочный груз переместится до ограничителя 10, запоминают. Центрифуга продолжает разгоняться до заданной частоты вращения и
работает в дальнейшем на этой частоте вращения.
В процессе торможения при ew (2 - 3 ) ftfc балансировочный груз перемещают с помощью серводвигателя 7 в радиальном направлении от оси вращения ротора в течение запомненного интервала времени. Благодаря этому балансировочный груз оказывается в положении, соответствующем максимальному балансировочному воздействию при приближении к частоте вращения о сверху.
Таким образом, исключается возможность возникновения существенных вибраций на частотах вращения предупреждается их возникновение при приближении частоты вращения к значению (Оо сверху. Предлагаемый способ позволяет существенно уменьшить динамические воздействия на подшипниковые узлы центрифуги и тем самым увеличить срок ее службы.
Формула изобретения
Способ автоматической балансировки центрифуги, заключающийся в перемеще0
5
0
нии балансировочного груза в зависимости от частоты вращения и уровня вибраций, от- личающийся тем, что, с целью повышения срока службы путем снижения динамических нагрузок, дополнительно контролируют радиальное положение балансировочного груза запоминают его положение при минимальном уровне вибраций, и при
а) (2 - 3 ) ak
где а - текущее значение частоты вращения;
УЬ - первая критическая частота вращения, при увеличении частоты вращения до номинальной перемещают балансировочный груз в положение, отстоящее от оси вращения на минимальное расстояние, а при снижении частоты вращения от номинальной flou)(2-3)uJb возвращают балансировочный груз в запомненное положение.
J г
| название | год | авторы | номер документа |
|---|---|---|---|
| Лабораторная центрифуга | 1986 |
|
SU1395378A1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| КОНТРОЛЬНЫЙ РОТОР ДЛЯ ПРОВЕРКИ БАЛАНСИРОВОЧНОГО СТАНКА | 2015 |
|
RU2613017C1 |
| СПОСОБ НИЗКООБОРОТНОЙ БАЛАНСИРОВКИ МАССЫ И АЭРОДИНАМИКИ ВЫСОКООБОРОТНОГО ЛОПАТОЧНОГО РОТОРА | 2009 |
|
RU2419773C2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| Центрифуга | 1985 |
|
SU1440554A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ТЕЛ | 1998 |
|
RU2148806C1 |
| Способ динамической балансировки вращающихся упругоподвешенных рабочих органов машин | 1972 |
|
SU726453A1 |
| Способ балансировки двух роторов в сборе | 1976 |
|
SU611125A1 |
Изобретение относится к лабораторной технике, может найти применение в биологии, медицине, биохимии и других областях при разделении веществ в центробежных полях и направлено на повышение срока службы центрифуги путем снижения динамических нагрузок. В центрифуге при ее разгоне на частоте вращения, меньшей первой критической, осуществляется автоматическая балансировка, когда балансировочный груз путем углового и радиального перемещений занимает положения, при котором осуществляется минимальный уровень вибраций. Это положение балансировочного груза запоминается. При частотах вращения &
м
/////////////////////////
Фие.1
fut.
/
/7 l 7 7 7 7 7 7 / /
Фт.2,
| Центрифуга | 1982 |
|
SU1050753A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
