Изобретение относится к обработке металлов давлением, а именно к оборудованию для сферодвижной штамповки.
Цель изобретения - повышение работоспособности машины для сферодвижной штамповки и улучшение условий труда путем оптиматизации размеров элементов сферодвижного механизма.
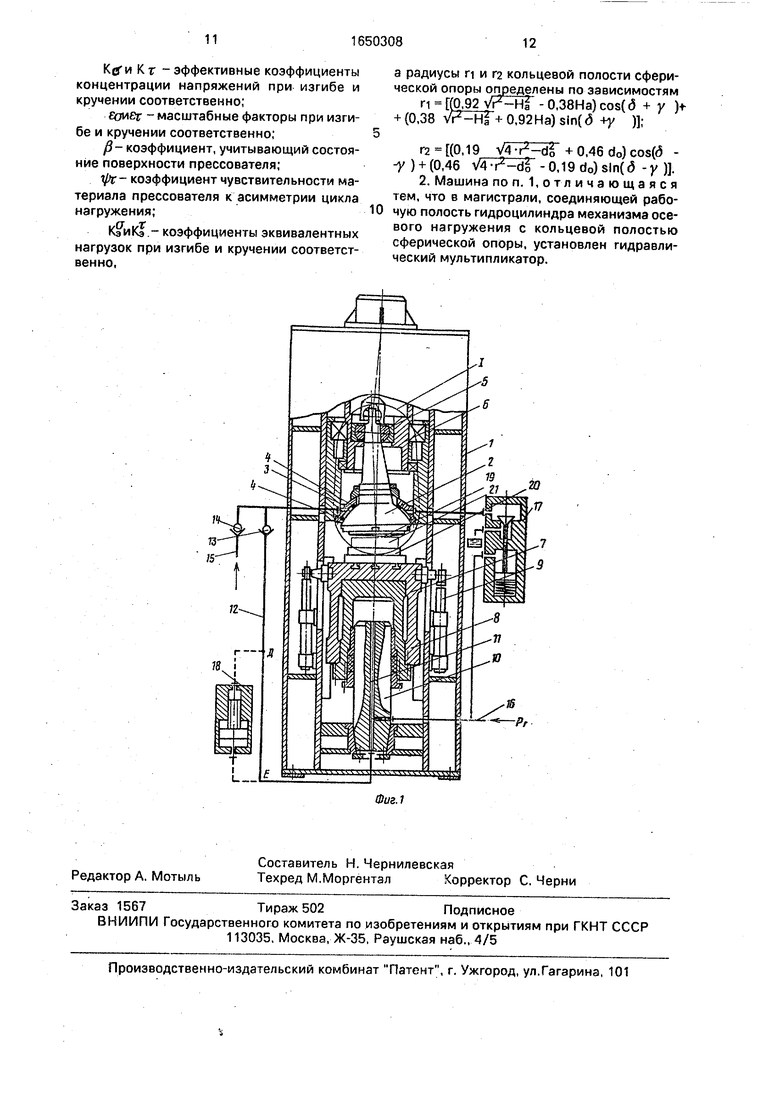
На фиг, 1 показана машина для сферодвижной штамповки, продольный разрез; на фмг. 2 - узел I на фиг. 1.
Машина для сферодвижной штамповки состоит из следующих частей. В верхней части станины 1 установлен сферодвижный механизм, прессователь 2 которого размещен в сферической опоре 3 с выполненной а ней кольцевой полостью, уплотненной двумя конЦентрично установленными уп- лотнительными кольцами 4, Водило прессо- вателя 2 сопряжено через самоустанавливающийся подшипник 5 с эксцентриковым ротором 6, сообщенным с приводом. Гидроцилиндр 7 механизма осевого нагружения жестко закреплен на подвижной траверсе 8, связанной с возвратными цилиндрами 9. Плунжер 10 гидроцилиндра 7 крепится к нижней части станины 1. В плунжере 10 выполнено сквозное отверстие 11, соединенное гидравлической магистралью 12 с входом кольцевой полости в сферической опоре 3. В магистрали 12 установлен обратный клапан 13. Магистраль 12 через обратный клапан 14 связана с линией 15 низкого давления. К рабочей полости гидроцилиндра 7 подведена линия 16 высокого давлений, через кото- руга также управляется клапан 17, установленный на выходе кольцевой полости сферической опоры 3. С целью уменьшения размеров полости сферической опоры в магистраль 12 на участке Е-Д устанавливается мультипликатор 18, тогда магистраль
12 на этом участке разрывается. На прессо- вателе 2 устанавливается верхний 19, а на траверсу 8 нижний 20 инструмент. На последнем уложена заготовка 21.
Машина работает следующим образом.
Начальное положение - колебательное движение прессователя 2 совместно с инструментом 19 в сферической опоре 3 при крайнем нижнем положении подвижной
траверсы 8. В этот момент от линии 15 низкого давления жидкость под давлением р через обратный клапан 14 подается в кольцевую полость сферической опоры 3, при этом обратный клапан 13 препятствует ее
влиянию на гидроцилиндр 7 машины. Далее жидкость низкого давления, пройдя через полость в сферической опоре 3 и клапан 17, который выполнен нормально открытым, сливается в бак гидросистемы, чем обеспечивается проток жидкости через сферическую опору 3 и ее охлаждение. При подключении к сети высокого давления рг линии 16 параллельно жидкость высокого давления поступает в рабочую полость гидроцилиндра 7, через отверстие 11 в плунжере 10 - в магистраль 12, а также на управление клапаном 17, который закрывается. С магистрали 12 жидкость высокого давления через клапан 13 попадает в кольцевую полость сферической опоры 3, причем клапан 14 предотвращает ее попадание в линию 15 низкого давления. В кольцевой полости сферической опоры 3 устанавлива- дтся давление, равное давлению в рабочей
полости гидроцилиндра 7, причем протока жидкости через полость кольцевой опоры 3 в этот момент нет, так как клапан 17 закрыт. После соприкосновения инструмента 19с заготовкой 21 начинается ее штамповка. При
этом, пренебрегая силами инерции и силами трения в сферодвижном механизме машины, действуют следующие силы (фиг. 2):
ЗО-РНнУФа-Б Ь-КтГ+Фт-Е
(7-1
Е
Рн - номинальное усилие, развиваемое механизмом осевого нагрухения; Р - усилие разгрузки со стороны кольцевой полости сферической опоры 3; реактивные силы Ra и RB сферической опоры 3 на прессователь 2 в точках А и В соответственно; Re - реакция в месте сочленения водила прессователя 2 с самоустангвливающимся подшипником 5 эксцентрикового ротора 6. Как видно из фиг. 2, наиболее эффективным является случай, при котором Рн Р , т.е. в случае отсутствия мультипликатора 18 в магистрали 12 при равенстве площади проекции кольцевой полости сферической опоры 3 на горизонтальную плоскость и площади плунжера 10 гидроцилиндра 7. Однако тогда реакция RD будет направлена в обратную сторону по сравнению с фиг. 2, следовательно, произойдет отрыв сферической части прессе- вателя 2 от сферической опоры 3, а значит 20 +(0,46v 4 -r2- do - 0,) Sin((5-у)2,
а f-фгсзт 9-(с1оУг2--н| -HaV
д d0V +Hf+HaV4 -dr)
15
(0,92 /rr:-Hf-o,38Ha) -cos((5
TL i ц 4-(0,38Vr2-Hi +Q,92Ha) )2-(0, 19V4Tr :aT+0,46do) -COS((5-y)+
ЗО-РНнУФа-Б Ь-КтГ+Фт-Е21
(7-1
46v 4 -r2- do - 0,) Sin((5-у)2,
(5)
Е
,46v 4 -r2- do - 0,) Sin((5-у)2,
(6)
20 +(0,46v 4 -r2- do - 0,) Sin((5-у)2,
а f-фгсзт 9-(с1оУг2--н| ),
(7) д d0V +Hf+HaV4 -dr), (8)
+(0,46v 4 -r2- do - 0,) Sin((5-у)2,
(0,92 /rr:-Hf-o,38Ha) -cos((5+y)+
TL i ц 4-(0,38Vr2-Hi +Q,92Ha) )2-(0, 19V4Tr :aT+0,46do) -COS((5-y)+
| название | год | авторы | номер документа |
|---|---|---|---|
| Пресс для сферодвижной штамповки | 1987 |
|
SU1500417A1 |
| Машина для сферодвижной штамповки | 1978 |
|
SU889219A1 |
| Сферодвижный механизм | 1978 |
|
SU721186A1 |
| Машина для сферодвижной штамповки | 1978 |
|
SU897341A1 |
| Сферодвижный механизм | 1978 |
|
SU889218A1 |
| Пресс для сферодвижной штамповки | 1984 |
|
SU1301526A1 |
| Сферодвижный механизм | 1986 |
|
SU1398958A1 |
| Пресс для сферодвижной штамповки | 1978 |
|
SU897340A1 |
| МАШИНА ДЛЯ СФЕРОДВИЖНОЙ ШТАМПОВКИ | 1994 |
|
RU2071856C1 |
| Способ изготовления металлических изделий и сферодвижный прессователь для его осуществления | 1978 |
|
SU700243A1 |
Изобретение относится к обработке металлов давлением, а именно к оборудованию для сферодвижной штамповки. Цель изобретения - повышение работоспособности машины для сферодвижной штамповки и улучшение условий труда путем оптимизации размеров элементов сферодвижного момента. Машина для сферодвижной штам
произойдет утечка жидкости из гидросистемы и упадет давление в линии 16. Нарушится ход процесса, ухудшатся условия труда. Для предотвращения этого явления реакция в точке В должна быть направлена к центру сферической опоры 3 (фиг. 2), а наиболее эффективным случаем является условие RB 0 или, другими словами, при равенстве давлений в полости гидроцилиндра 7 и полости сферической опоры 3, площадь проекции кольцевой полости сферической опоры 3 на горизонтальную плоскость должна быть меньше площади плунжера 10. Исходя из упомянутого условия RB 0 и соотношения площадей, при котором RB 0, условия прочности водила прессователя 2, которое задает соотношение RB 0 при минимальных допустимых размерах элементов конструкции, составлены соотношения (1) - (12), которые определяют размеры и параметры сферодвижного механизма машины для сферодвижной штамповки г, a, do. Решение системы уравнений (1) - (9) с девятью неизвест: /ми (г, А, К, Б, Г, Е, a, do, 5 ) легко реализуется с помощью ЭВМ, а дальнейшая подстановка найденных неизвестных в уравнения (10) - (12) дает полную совокупность размеров и параметров, определяющих нормальную работу сферодвижного механизма
А
cos (а - р - у )
L-sin(a ) + r-sin p-cosy
О)
К 1 m
Рн
,
Б Vr cosa - U,5;A-r-sin2y,2 L-cosa-r-sin2 p
(3)
,Г COS PAIL .31П(а-к/) -rainy cosjj+cgs() bina L-cosa-r strysinf +y)n
25
30
оо
40
45
50
55
где А, К, Б, Г, Е, д, Фа, Фг - обозначения, введенные для облегчения вычислений.
Величина А (размерность 1/м) входит в зависимость для определения разности
Рн-Р Рн -ен -А,
где Рн - усилие, развиваемое механизмом осевого нафужения;
Р - усилие раз рузки в кольцевой полости гидростатического подшипника;
ен - эксцентриситет приложения осевого усилия Рн.
Величина К (единица измерения - безразмерная) учитывает потери на трение в уплотнениях гидроцилиндра механизма осевого нагружения и входит в зависимость
Рн -SP K -Рн. 1
где Рн -давление в кольцевой полости сферической опоры,
р - площадь проекции кольцевой полости нз горизонтальную плоскость.
С помощью величины Б (оазмерность 1 /м) по зависимости
RC PH -ен- Б
можно определить реакцию в шарнире С (Re).
Реакция в точке А (фиг. 2) сферической опоры определяется с помощью величины Г
Ra Рн -ен Г.
Крутящий момент Мк, действующий на водило прессователя со стороны эксцентрикового ротора, определяется с использованием параметра JE (единица измерения безразмерная)
Мк Рн -ен- Е.
Величина 5 также использована для упрощения записи зависимостей, определяется по формуле (8), входит в формулы (10) и
(11) для определения радиусов кольцевой полости (п и Г2);
(р - угол трения в сферической опоре прессователя;
ft tg f - коэффициент трения;
у- угол наклона оси прессователя;
L- конструктивное расстояние от центра качаний прессования до места сочленения водила прессователя с эксцентриковым ротором;
m - масса качающихся частей сферод- вижного механизма;
g - ускорение свободного падения;
Рн - номинальное усилие, развиваемое механизмом осевого нагружения;
вн - эксцентриситет приложения осевого усилия;
На - высота качающегося инструмента;
Не - расстояние от центра качаний прессователя до места перехода сферы прессователя в водило;
Рн -давление в кольцевой полости сферической опоры, причем Рн Pr k2, где рг - давление в полости гидроцилиндра осевого нагружения, k - коэффициент мультиплика- ции мультипликатора, установленного в ма- гистраль, соединяющую полость гидроцилиндра механизма осевого нагружения с кольцевой полостью сферической опоры, в случае отсутствия в указанной ма- гистрали мультипликатора k 1;
г- радиус сферической опоры прессователя;
vO.Vrr (-тЧГ)2
Or(5)2tO-25-K3r(-)f,
а- 1 и г-1 - пределы выносливости материала прессователя при изгибе и кручении соответственно;
KI и Кг - эффективные коэффициенты концентрации напряжений прпи изгибе и кручении соответственно;
ести ег - масштабный фактор при изгибе и кручении соответственно;
ft- коэффициент, учитывающий состояние поверхности;
ipt коэффициент чувствительности материала прессователя к асимметрии цикла нагружения;
Кэ и Кэ - коэффициенты эквивалентных нагрузок при изгибе и кручении соответственно,
а радиусы кольцевой полости сферической опоры (п и Г2) определены по зависимостям
П (0.92 Vr-HJ - 0,38На ) cos(d+ у ) + 0,38 Vr-Hi+0,92Ha)sin((64y ), (10)
0
5
0
5 0
5
0
5
0
Г2 (0,19 V4-r2-d2,+0,46d0)cos(5 -у ) + + (0,46 Y rz ::dT-0,19do)sin(5 -у ), (11) тогда усилие разгрузки в полости сферической опоры равно
Р рг-л(п2-г22).(12)
При выборе размеров элементов сфе- родвижного механизма по приведенным зависимостям (1) - (12) усилие разгрузки в полости сферической опоры (Р ) будет несколько меньше усилия, развиваемого механизмом осевого нагружения (Рн), но при этом будет гарантировано отсутствие явлений отрыва сферического прессователя от сферической опоры и утечки в этом месте жидкости гидросистемы, а также падения давления в кольцевой полости сферической опоры в процессе работы, что повысит работоспособность машины, улучшит условия труда, При сферодвижной штамповке детали 21 обеспечена гидростатическая разгрузка в сферической опоре .3, а также за счет выбора оптимальных размеров ее кольцевой полости гарантировано повышение работоспособности и улучшение условий труда. По окончании штамповки линия 16 высокого давления обесточивается, клапан 17 открывается, возвратными гидроцилиндрами 9 подвижная траверса 8 приводится в нижнее положение, давление в магистрали 12 падает и через линию 15 низкого давления, кольцевую полость сферической опоры 3 и клапан 17 возобновляется проток жидкости.
Примером конкретного исполнения машины для сферодвижной штамповки с размерами и параметрами, определенными по приведенному условию RB 0 и по зависимостям (1) - (12), может служить машина со следующими расчетными величинами, найденными с помощью вычислительной техники.
Задаваемые величины: Рн 5000000,0 Н (500,0 тс); эи 0,1 м; m 10000,0 Н-с2/м (1000 кг); р 0,08 рад, тогда р tg уНрОЗ; рар4А рад(2°30 ); L 1.0м;На 0.05 м; рн- 0,3 х 108 Н/м2; Нб V -d&i; материал водила - Сталь 40Х, термообработка при Тт - 840-860°С и отпуск при Т0 180-200°С. твердость НШСэ 45-50, для этих значений выбраны табличные данные Каи Кт,7--1 и
5
К& К3
иК
, г-1,Јаиег,уЗ ,1рг
Расчетные величины: г и,32 м; do 0,211м; а 0,876 рад (50°15 );Ra 673000 Н (6730G кгс); RB 0; Rc 508000 Н (50800 кгс);. П 0,288 м; Г2 0,188; Р 4500000,0 Н (450,0 тс).
Для снижения размеров сферической опоры 3 за счет повышения давления в ее кольцевой полости в магистраль 12 на участке Д-Е встаивается мультипликатор 18, тогда давление в кольцевой полости сферической опоры 3 определяется как рн РГ к2, где k - коэффициент мультипликации мультипликатора 18. В остальном при применении в машине для сферодвижной штамповки мультипликатора 18 принцип работы остается прежним.
Применение предлагаемой машины для сферодвижной штамповки с размерами и параметрами сферодвижного механизма, определенными по зависимостям (1) - (12), позволяет, по сравнению с прототипом, повысить работоспособность машины и улучшить условия труда на ней. По предварительным оценкам, за счет предотвращения утечки жидкости из-за отрыва прессователя от сферической опоры при сферодвижной штамповке, а значит и-предотвращения падения давления в гидросистеме и снижения скорости штамповки, производительность машины увеличивается в 1,3 раза.
Формула изобретения 1. Машина для сферодвижной штамповки, содержащая станину со смонтированным в ней сферодвижным механизмом с приводом в виде сферического прессователя с водилом, установленного в сферической опоре с гидравлически уплотненной кольцевой полостью, эксцентриковый ротор и верхний инструмент, закрепленный на прессователе, механизм осевого нагруже- ния в виде гидроцилиндра, соединенного с подвижной траверсой, несущей нижний инструмент, и расположенного в нем плунжера, жестко соединенного со станиной, гидравлическую магистраль, соединяющую полость гидроцилиндра механизма осевого нагружения с гидравлически уплотненной кольцевой полостью сферической опоры, отличающаяся тем, что, с целью повышения работоспособности машины и улучшения условий труда на ней путем оптимизации размеров элементов и параметров сферодвижного механизма, радиус г сферической опоры, уголоС-раскрытия кольцевой полости сферической опоры по среднему радиусу гср, диаметр прессователя в месте перехода водила в сферу определяют из системы уравнений
cos (а -у)
А
L-sin(a ) + r-sinyrcosy
К 1 HL1JL -|ПА, н
Б Wr cosa: - 0,5 r-sin2y) -д , 1 L-cosa-r-sirvVл2-.2
Г - .POsg A L-sin(a-Hp) r-sirvp-cosyl+ra - -u,) 2-sina L-cosa-r-sin sm()p
О-РиЧиУФ гБ Н-ыЧФг-Е2
a-i
n, 1.
a -t-2arcsin -(doVrz-Hi-HaV4r2-di) a doVr2+Hf+H3V4 ), ЈтгЧ(0,92 .SSHa) cos(6-ty)+
71 p H
+(0,38 /гг-::нГ-Н),92На)-51п((5+у)2- -{(0,19V4-r2-d 5+0,46do)-COs(5-x)+
+(0,46V4 -0,19d0) -sirXa-y)2,
где А, К, Б, Г, E, 6 , Фа, Фг - обозначения, введенные для облегчения вычислений (в описании дано определение указанных ве- личин;
р - угол трения в сферической опоре прессователя;
/i - igp - коэффициент трения между прессователем и сферической опорой; у- угол наклона оси прессователя; L- конструктивное расстояние от центра качаний прессователя до г.-,оста сочленения водила прессователя с эксцентриковым ротором;
g - ускорение свободного падения; m - масса качающихся частей пресса сферодвижного механизма;
Рн - номинальное усилие, развиваемое механизмом осевого нагружения;
ен эксцентриситет приложения осево- го нагружения;
На - высота качающегося верхнего инструмента;
Нб - расстояние от центра качаний прессователя до места перехода сферической поверхности прессователя в водило;
Он - давление в кольцевой полости сферической опоры, DH рг, где рг - давление в рабочей полости гидроцилиндра осевого нагружения;
Фа (.
55
Кг
Фг((%
-и/т)2
(7-1 и г-1 - пределы выносливости материала прессователя при изгибе и круче- цйй соответственно;
Ktfn Kr -эффективные коэффициенты концентрации напряжений при изгибе и кручении соответственно;
Ј0иег - масштабные факторы при изгибе и кручении соответственно;
коэффициент, учитывающий состояние поверхности прессователя;
Т- коэффициент чувствительности материала прессователя к асимметрии цикла нагружения;
.- коэффициенты эквивалентных нагрузок при изгибе и кручении соответственно,
ili
а радиусы п и Г2 кольцевой полости сферической опоры определены по зависимостям
П (0 92 Vr-HJ - О.ЗВНа) cos( д + у )+ + (0,38 + 0,92На) sin((5 -fy );
r2 (0,19 + 0,46 do) cos((5 - -у) + (0,46 -0,19d0)sln(6-у ).
ft
| Машина для сферодвижной штамповки | 1978 |
|
SU889219A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
