Изобретение относится к подьемно- транспортным устройствам типа манипулятора, предназначенного для замены узлов и деталей оборудования прокатных станов на ремонтах, и может использоваться в машиностроении и строительстве
Цель изобретения - улучшение эксплуатационных характеристик
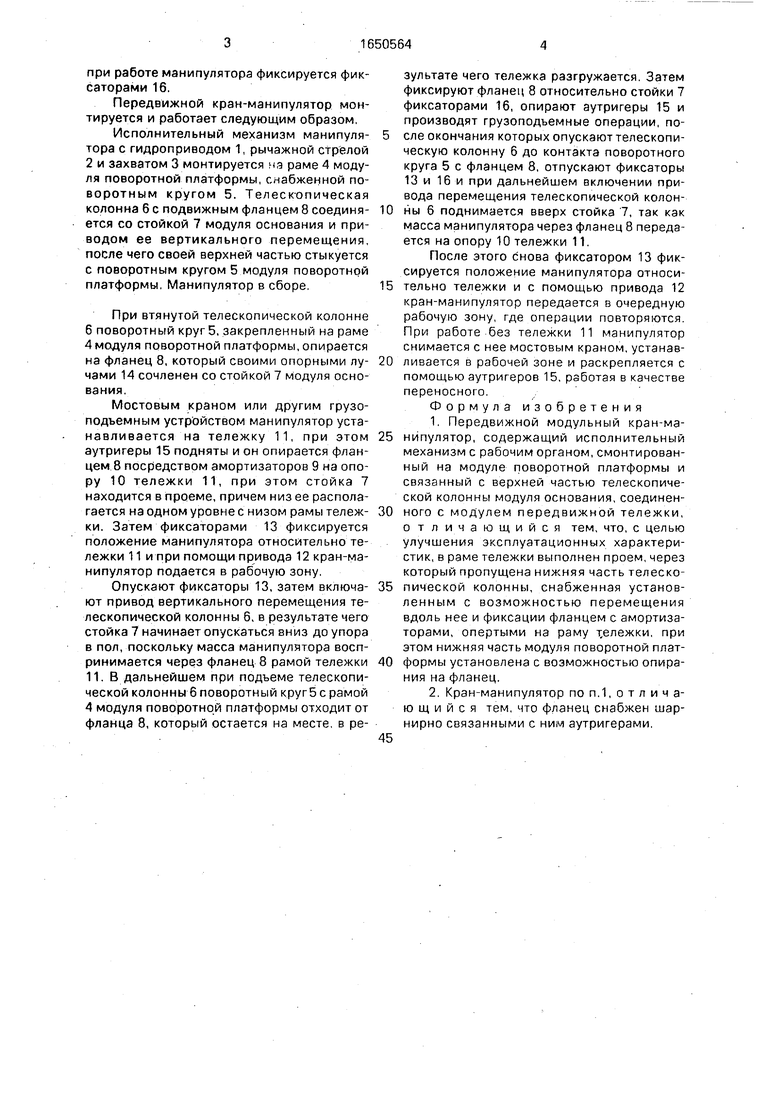
На фиг. 1 показан передвижной кран- манипулятор, вид сбоку, на фиг 2 - разрез А-А на фиг 1.
Передвижной кран-манипулятор состоит из исполнительного механизма, включающего гидропривод 1 и рычажную стрелу 2
с захватом 3 установленные на раме 4 модуля поворотной платформы, поворотный круг 5 которого соединен с телескопической колонной 6, соединенной со стойкой 7 модуля основания С телескопической колонной 6 подвижно соединен фланец 8, контактирующий посредством амортизаторов 9 с опорой 10 на раме тележки 11, снабженной приводом 12 и фиксаторами 13, взаимодействующими со стойкой 7 модуля основания. Фланец 8 выполнен в виде опорных лучей 14, сочлененных с верхней частью стойки 7 и снабженных шарнирно установленными опорными элементами, например аутригерами 15 Сочленение фланца 8 со стойкой 7
О
сл о
01 0 4Ьь
при работе манипулятора фиксируется фиксаторами 16.
Передвижной кран-манипулятор монтируется и работает следующим образом,
Исполнительный механизм манипулятора с гидроприводом 1, рычажной стрелой 2 и захватом 3 монтируется ч а раме 4 модуля поворотной платформы, снабженной поворотным кругом 5. Телескопическая колонна 6 с подвижным фланцем 8 соединяется со стойкой 7 модуля основания и приводом ее вертикального перемещения, после чего своей верхней частью стыкуется с поворотным кругом 5 модуля поворотной платформы, Манипулятор в сборе.
При втянутой телескопической колонне 6 поворотный круг 5, закрепленный на раме 4 модуля поворотной платформы, опирается на фланец 8, который своими опорными лучами 14 сочленен со стойкой 7 модуля основания.
Мостовым краном или другим грузоподъемным устройством манипулятор устанавливается на тележку 11, при этом аутригеры 15 подняты и он опирается фланцем 8 посредством амортизаторов 9 на опору 10 тележки 11, при этом стойка 7 находится в проеме, причем низ ее располагается на одном уровне с низом рамы тележки. Затем фиксаторами 13 фиксируется положение манипулятора относительно тележки 11 и при помощи привода 12 кран-манипулятор подается в рабочую зону.
Опускают фиксаторы 13, затем включают привод вертикального перемещения телескопической колонны б, в результате чего стойка 7 начинает опускаться вниз до упора в пол, поскольку масса манипулятора воспринимается через фланец 8 рамой тележки 11. В дальнейшем при подъеме телескопической колонны 6 поворотный кругб с рамой 4 модуля поворотной платформы отходит от фланца 8, который остается на месте, в результате чего тележка разгружается. Затем фиксируют фланец 8 относительно стойки 7 фиксаторами 16, опирают аутригеры 15 и производят грузоподъемные операции, поеле окончания которых опускают телескопическую колонну 6 до контакта поворотного круга 5 с фланцем 8, отпускают фиксаторы 13 и 16 и при дальнейшем включении привода перемещения телескопической колонны 6 поднимается вверх стойка 7, так как масса манипулятора через фланец 8 передается на опору 10 тележки 11.
После этого снова фиксатором 13 фиксируется положение манипулятора относительно тележки и с помощью привода 12 кран-манипулятор передается в очередную рабочую зону, где операции повторяются При работе без тележки 11 манипулятор снимается с нее мостовым краном, устанавливается в рабочей зоне и раскрепляется с помощью аутригеров 15, работая в качестве переносною.
Формула изобретения
1.Передвижной модульный кран-ма- нипулятор, содержащий исполнительный
механизм с рабочим органом, смонтированный на модуле поворотной платформы и связанный с верхней частью телескопической колонны модуля основания, соединенного с модулем передвижной тележки, отличающийся тем, что, с целью улучшения эксплуатационных характеристик, в раме тележки выполнен проем, через который пропущена нижняя часть телескопической колонны, снабженная установленным с возможностью перемещения вдоль нее и фиксации фланцем с амортизаторами, опертыми на раму т,ележки, при этом нижняя часть модуля поворотной платформы установлена с возможностью опира- ния на фланец.
2.Кран-манипулятор по п.1, отличающийся тем, что фланец снабжен шар- нирно связанными с ним аутригерами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| Консольно-поворотный кран | 1980 |
|
SU943184A1 |
Изобретение относится к подъемно- транспортным устройствам а именно к ма нипуляторам преимущественно для замены узлов оборудования прокатных станов на ремонтах Цель изобретения улучшение эксплуатационных характеристик Устройство состоит из исполнительного механиз ма с рабочим органом модулей поворотной платформы и основания, соединенных через телескопическую колонну 6, а также передвижной тележки 11 Причем последняя выполнена с проемом, через который пропущено основание манипулятора а телескопическая колонна 6 снабжена фланцем 8, опертым посредством амортизаторов 9 на раму тележки 11, относительно которой основание имеет возможность вертикального перемещения и фиксации Благодаря тому что грузоподьемные операции производятся без нагрухения тележки 11 которая служит для подачи манипулятора в рабочую зону обеспечиваются меньшие ее габариты и необходимая маневренность устройства Кроме того расширение технологических возможностей манипулятора обеспечивается тем, что фланец 8 соединен с телескопической колонной 6 подвижно и выполнен в виде опорных лучей сочлененных с верхней частью стойки основания с возможностью фиксации и снабженных шарнирно установленными опорными элементами например аутригерами или распорными тягами 1 з п ф-лы 2 ил ё
Фиг. 2
| Патент США Ы 4042115 кл В 66 С 23/72,1981 |
