Изобретение относится к общему машиностроению, а именно к гидравлическим и пневматическим исполнительным механизмам, и может быть использовано в станкостроении, робототехнике и автоматике.
Целью изобретения является расширение области применения гидропривода.
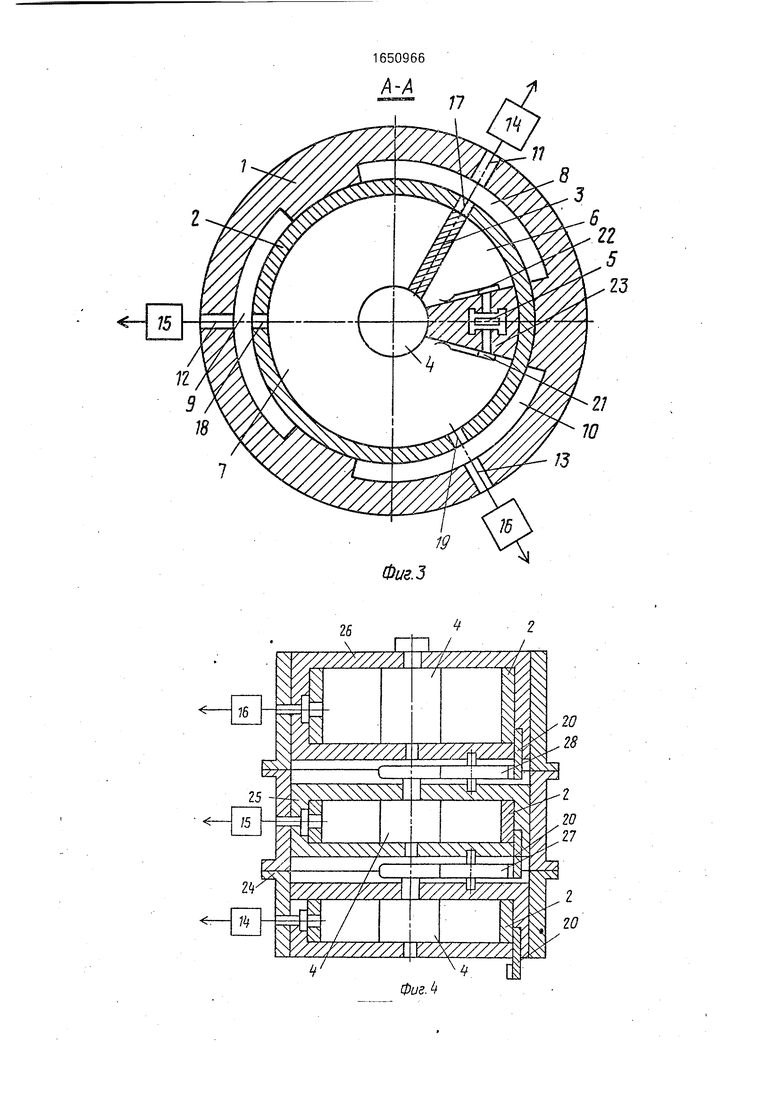
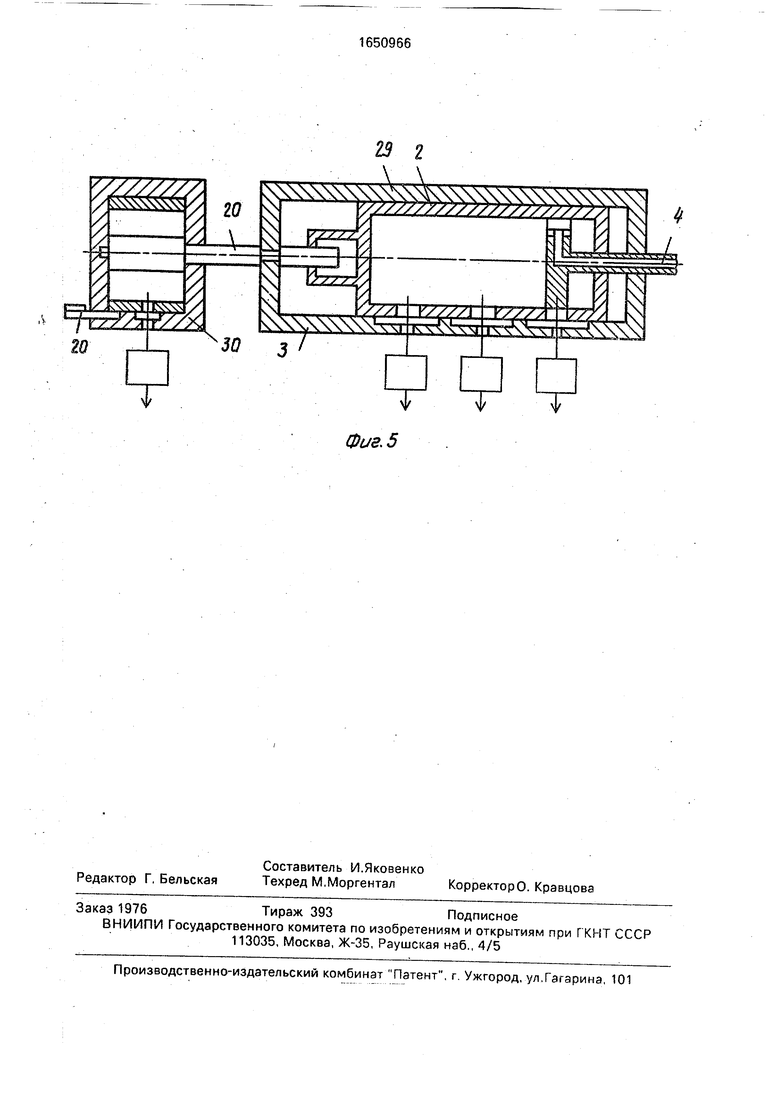
На фиг. 1 изображен линейный гидропривод, продольный разрез; на фиг. 2 - поворотный гидропривод, продольный разрез; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - трехразрядный гидропривод, продольный разрез; на фиг. 5 - двухразрядный линейный гидропривод.
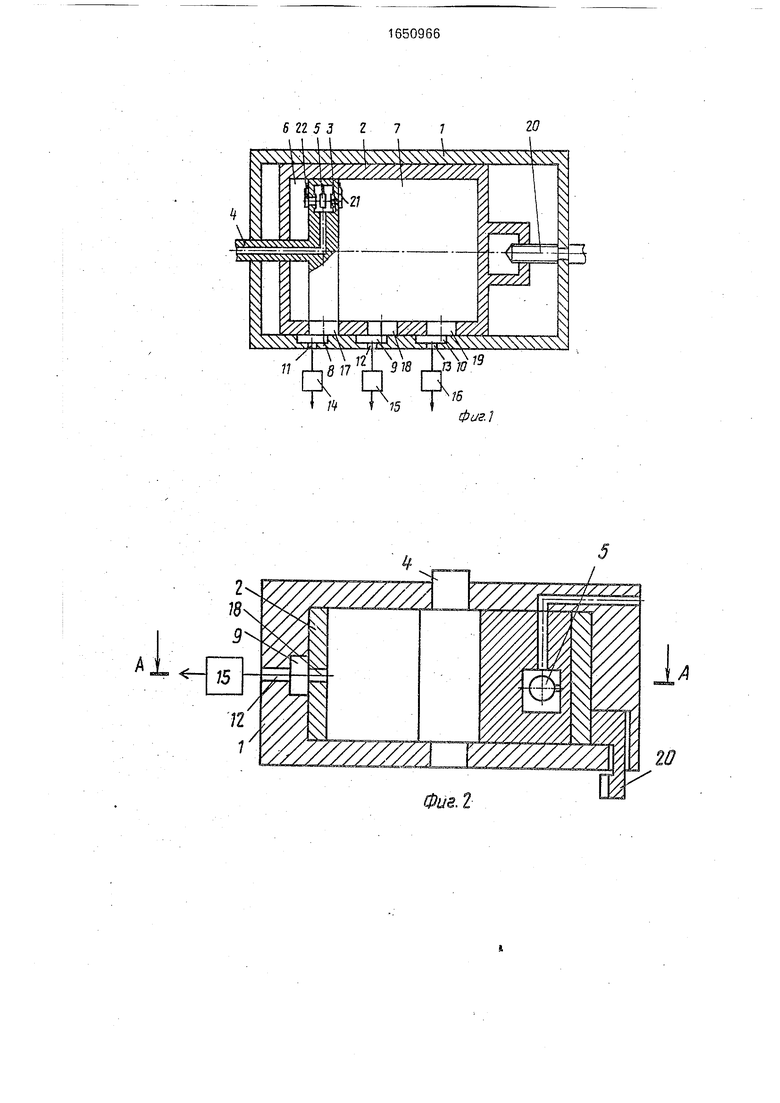
Линейный гидропривод (фиг. 1) имеет корпус 1, в котором расположен цилиндр 2 с поршнем 3 и пустотелым штоком 4. Внутри поршня установлена подпружиненная двусторонняя заслонка 5. Напорная магистраль соединена через полый шток 4 и заслонку 5 с рабочими полостями 6, 7 через каналы по обе стороны поршня. На корпусе 1 выполнены проточки 8-10 и каналы 11-13 для соединения рабочих полостей гидропривода через клапаны 14-16 и каналы 17-19 цилиндра 2 с атмосферой (сливной магистралью).
Цилиндр 2 может перемещаться вдоль оси под действием, например, винтовой пары регулятора 20 положения от внешнего привода относительно корпуса 1.
Сопла поршня имеют разный диаметр, обратно пропорциональный действующим сечениям поршня штоковой и бесштоковой стороны. Для разобщения рабочих полостей
| ижзжгй
6, 7 на поршне установлены обратные клапаны 21, 22.
Поворотный гидропривод, изображенный на фиг. 2, 3, имеет корпус 1, в котором расположен цилиндр 2 с подвижным поршнем 3 -лопастью, закрепленной на штоке - (валу) 4, двустороннюю заслонку 5, рабочие полости б, 7, проточки 8-10, каналы 11-13, клапаны 14-16, каналы 17-19, регулятор 20 положения (зубчатый сектор), обратные клапаны 21, 22, неподвижную перегородку 23. Подпружиненная двусторонняя заслонка 5 установлена в неподвижной перегородке 23. и рабочая среда подается от напорной магистрали через торцовую стенку корпуса в обе рабочие полости одновременно. На корпусе 1 выполнены проточки 8-10 и каналы 11-13 для соединения рабочих полостей через клапаны 14-16 и каналы 17- 19 цилиндра 2 с атмосферой (сливной магистралью).
Цилиндр 2 может вращаться вокруг оси под действием, например, регулятора 20 положения (зубчатого сектора) от внешнего привода относительно корпуса 1. Для разобщения рабочих полостей 6, 7 установлен ы обратные клапаны 21, 22.
На фиг 4 изображен привод, состоящий из трех отдельных поворотных приводов 24- 26, соединенных механически с помощью фланцев в единую конструкцию; с помощью зубчатых передач 27, 28 три гидропривода соединены кинематически.
Гидропривод 29 линейного движения с одной ступенью 30 вращательного движения изображен на фиг. 5. Ступень 30 вращательного привода соединена с помощью винтовой кинематической пары с регулятором 20 положения линейного цифрового гидропривода 29,
Цифровой линейный гидропривод, изображенный на фиг, 1, работает следующим образом.
При закрытых клапанах 14-16 под действием одинакового давления в рабочих полостях 6, 7 и нагрузки обратные клапаны закрыты и не дают возможности поршню перемещаться в цилиндре.
Открывают, например, клапан 16, соединив рабочую полость 7 через проточку 10 и каналы 13, 19с атмосферой Под действием разрежения в рабочей яолости 7 открывается обратный клапан 21, соединяя полость 7 с напорной магистралью через полость заслонки 5, что приводит к немедленному перекрытию заслонкой 5 доступа р абочей среды из напорной магистрали в полость 7. Разрежение в полости 7 увеличивается, и в определенный момент поршень 3, преодолевая сопротивление полезной нагрузки и трения, начинает перемещаться вправо. Обратный клапан 22 при этом не препятствует поддержанию в рабочей полости 6 давления, равного давлению в напорной магистрали Когда в процессе движения поршень подходит к каналу 19, соединенному с атмосферой, то начинает постепенно его перекрывать и давление в полости 7 возрастает, когда происходит полное пере0 крытие этого канала, обратный клапан 21 закрывается и подпружиненная заслонка 5 возвращается в среднее положение, а обратные клапаны 21, 22, поочередно отсекая рабочие полости, способствуют быстрому
5 останову поршня 3, а с ним и штока 4 в позиционном положении,
Аналогично происходит перемещение поршня влево. Прм открывании клапана 14 разрежение создается в полости 6 и обрат0 ный клапан 22, открываясь, способствует тому, что подпружиненная заслонка 5 перемещается влево и закрывает доступ рабочей среды из напорной магистрали в полость 6. За счет создаваемого разрежения поршень
5 перемещается до положения перекрытия канала 17
Таким образом, поршень, перемещаясь внутри цилиндра 2, обеспечивает позиционирование, выходного устройства (штока 4)
0 относительно корпуса 1 в определенных позициях, соответствующих расположению в цилиндре каналов 17-19. Для установки штока 4 в любой точке на траектории позиционирования служит регулятор 20 положе5 ния, с помощью которого по аналоговому и/или дискретному закону можно перемещать внутренний цилиндр 2 на величину шага между каналами 17-19.
Подобным образом работает цифровой
0 поворотный гидропривод (фиг. 2, 3). При закрытых клапанах 14-16 под действием одинакового давления в рабочих полостях б, 7 и нагрузки обратные клапаны закрыты и не дают возможности поршню перемещаться в
5 цилиндре.
Открывают, например, клапан 16, соединив рабочую полость 7 через проточку 10 и каналы 18, 19с атмосферой, Под действием разрежения в рабочей полости 7 откры0 вается обратный клапан 22, соединяя полость 7 с напорной магистралью через полость заслонки 5, что приводит к немедленному перекрытию заслонкой 5 доступа рабочей среды под давлением в полость 7.
5 Разрежение в полости 7 увеличивается, и в определенный момент подвижная лопасть, преодолевая сопротивление полезной нагрузки и трения, начинает перемещаться против часовой стрелки обратный клапан 22 при этом не препятствует поддержанию
в рабочей полости 6 давления, равного давлению в напорной магистрали. Когда в ходе движения подвижная лопасть подходит к каналу 19, соединенному с атмосферой, то начинает постепенно его перекрывать; давление в полости 7 возрастает и, когда происходит полное перекрытие этого канала, обратный клапан 21 закрывается и подпружиненная заслонка 5 возвращается в среднее положение. В то же время обратные клапаны 21,22, поочередно отсекая рабочие полости, способствуют быстрому останову подвижной лопасти, а с ней и выходного вала 4 в позиционном положении.
Аналогично перемещается подвижная .лопасть в направлении по часовой стрелке. При открывании клапана 14 разрежение создается в полости 6 и обратный клапан 22, открываясь, заставляет переместиться подпружиненную заслонку 5 и закрыть доступ рабочей среды из магистрали нагнетания в полость 6. За счет создаваемой разности давлений между полостями подвижная лопасть перемещается по часовой стрелке до положения перекрытия канала 17.
Таким образом, подвижная лопасть, перемещаясь внутри цилиндра 2, обеспечивает позиционирование выходного устройства (вала)4 относительно корпуса 1 в определенных позициях, соответствующих расположению в цилиндре каналов 17- 19. Для установки вала 4 в любой точке на траектории позиционирования служит регут лятор 20 положения, с помощью которого по аналоговому и/или дискретному закону можно перемещать внутренний цилиндр 2 на величину шага между каналами 17-19.
Это видно из работы цифрового поворотного гидро(пневмо)привода. изображенного на ф -1г. 4.
Ecnv. затормозить регулятор 20 положения первого поворотного привода 24 и открыть клапаны 14-16 для соединения рабочих полостей с атмосферой, каждый из гидро(пневмо)приводов займет положение определяемое открытым в данный момент клапаном и величиной смещения цилиндра 2 от предшествующего привода 2 с учетом кинематического передаточного отношения передач 27, 28.
Для привода, изображенного на фиг. 4, при наличии в каждом модуле 16 позиционных положений и передаточном отношении кинематических пар 1-16, возможно обеспечение позиционирования 16 - 4096 позиций.
Таким образом, последователь,1-о наращивая цифровые поворотные модули (в предел;
достижммой технологическом
точности), можно увеличивать дискретность 5 позиционирования.
Принцип работы гидропривода, гьо5ра- женного на фиг. 5, заключается в тог«:, что, с помощью поворотного модул (ступени 30) смещается внутренний цилиндр 2 линеино10 го гидропривода 29 в пределах шага с помощью, например, винтовой пары и обеспечивает позиционирование штока 4 последнего в любой точке траектории.
Преимущества пневмо(гидро)привода
5 следующие: простота конструкции и, соответственно, низкая стоимость привода;простота коммутации привода и полная его совместимость с цифровыми системами управления, в том числе от ЭВМ; малые дина0 мичес: ие нагрузки н высокое быстродействие; позиционирование его бе упоров, что обеспечивает надежность работы; широкая область применения как от- .дельных приводов, так и их сочетаний.
5
Формула изобретения 1. Гидро(пневмо)привод, имеющий корпус с магистралью нагнетания и магистралями слива, в котором расположены
0 поршень со штоком и по крайней мере четыре регулирующих дросселя, образующие гидравлический мост, причем два из них выполнены в виде сопел и подпружиненной заслонки, а остальные дроссели образова5 ны совмещением каналов в корпусе и порщ- неи подключены к магистралям слива, отличающийся тем, что, с целью расширения области применения, Б корпусе установлен цилиндр с возможностью регулирования
0 его положения относительно корпуса, поршень со штоком размещен в этом цилиндре, регулирующие дроссели, выполненные в виде сопел и заслонки, сообщены с рабочими полостями гидропривода через обратные
5 клапаны, а каналы, образующие с поршнзм дроссели, выполнены в цилиндре.
2. Гидропривод по п. 1, о т л и ч а ю щ и й- с я тем, что он содержит п гидроприводов, причем шток предыдущего гидропривода
0 соединен с узлом регулирования положения цилиндра последующего гидропривода через кинематические понижающие передачи, имеющие передаточное отношение, обратное числу позиций младшего
5 разряда.
со
CD СП О
ю
СО
т
ЭПф
I
/
У/////Х//л
//////fy
I I
/////
У/ /////ЛЩ
ybN
У//Л/////7/
s:
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидропривод | 1981 |
|
SU1028907A1 |
| Силовой пневмоцилиндр | 1986 |
|
SU1404696A1 |
| Модуль манипулятора | 1987 |
|
SU1512763A1 |
| Система управления двигателем внутреннего сгорания с отключаемыми цилиндрами | 1990 |
|
SU1828510A3 |
| НАСОС ПОРШНЕВОЙ ГИДРОПРИВОДНОЙ | 2019 |
|
RU2719754C1 |
| СИСТЕМА СМАЗКИ ТУРБОКОМПРЕССОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2592090C1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1985 |
|
SU1301968A1 |
| Устройство для впрыска топлива в двигатель внутреннего сгорания | 1970 |
|
SU491239A3 |
| Пневмогидравлический привод | 1979 |
|
SU821759A1 |
| Пневматический позиционер | 1987 |
|
SU1721320A1 |
Изобретение относится к общему машиностроению, связанному с гидравлическими и пневматическими исполнительными механизмами, и может быть использовано в станкостроении, робототехнике и автоматике. Цель изобретения - расширение области применения гидро(пневмо)привода. В приводе в корпусе 1 установлен цилиндр 2, положение которого регулируется с помощью винтовой пары регулятора положения 20. Шток 4 и поршень 3 выполнены пустотелыми, сопла поршня 3 прикрыты обратными клапанами 21 и 22. Возможно выполнение гидропривода линейным и поворотным. Также возможно соединение п гидроприводов следующим образом: шток предыдущего привода соединяется с узлом регулятора положения последующего привода через кинематическую передачу. 1 з.п.ф-лы, 5 ил.
/
)
L
81
г
Т
23
т
т
Фиг. 5
| Гидропривод | 1979 |
|
SU850947A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
